

5.6. Физическое моделирования узла трения (на примере пары трения «колесо – рельс»)
На сегодняшний день трудно представить единую методику моделирования, которая бы позволила создать цельную модель путевой машины, включающую единство подсистем конструкции рамы с навесным оборудованием, систем подвески и собственно колесной пары и тягового привода, так и модель верхнего строения пути. Каждая из данных подсистем может быть представлена в виде физической или математической модели. Общим правилом разделения подсистем может быть наличие в ней узла трения, роль которого в данной подсистеме является определяющей, то есть оказывающей определяющее влияние на динамику ее функционирования. Например, пара сцепления «колесо – рельс», демпферы крутильных и линейных колебаний, тормоза, фрикционная муфта и т.д.
Практически все системы можно определить как фрикционные механические системы, потому что уже наличие крепежных узлов (пара болт – гайка – шайба, заклепка и т.д.) ставят их функционирование в зависимость от трения. Придавая им статус стабильного узла трения (оптимально высокое и стабильное значение коэффициента сцепления, контроль затяжки болтовых соединений, наличие устройств компенсации зазоров, гарантированная работоспособность подшипников трения качения и гидродинамических подшипников скольжения) на время эксплуатации или межремонтный цикл.
Поэтому закономерности движения, проблемы управления движением необходимо рассматривать с учетом заданных и изменяющихся в ходе эволюции свойств фрикционного контакта.
Изучение фрикционных механических систем как механической системы не всегда возможно и корректно, поскольку различные входящие в нее подсистемы определяются различными физико-механическими, химическими и физическими взаимодействиями и не вписываются исключительно в проблемы механики систем.
Достоверность модели фрикционной части ФМС имеет принципиальное значение, так как она объединяет упруго-диссипативные характеристики механических подсистем, строго говоря, не описываются ни одной из моделей классической механики, так как они зависят от мощности и работы диссипативных сил и относятся исключительно к проблемам нелинейной механики. Однако, наличие такого специфичного состояния фрикционного контакта, как установившийся после приработки процесс равновесного состояния позволяет характеризовать его как случайно-стационарный, то есть диссипативные свойства, свойства пограничных слоев и трибоконтакта остаются переменными во времени, однако эти изменения являются достаточно медленными.
Представление путевой машины как пространственной дискретной динамической структуры взаимодействующих подсистем, определенные массы которых взаимодействуют через упруго-диссипативные связи, получил в динамике машин большее распространение и фактически является предметом исследования теории колебаний систем с конечным числом степеней свободы. Тем не менее, необходимо учитывать, что как подсистемы, так и все разнообразные процессы, протекающие в них (преобразование энергии механической системы в производство тепла, в работу сил трения на перемещение и т.д.) являются взаимосвязанными и одновременно частично самостоятельными.
Поэтому при составлении физико-математической модели исследуемой системы необходимо учитывать, что:
подсистема сцепления является тем фактором, который объединяет упруго-диссипативные характеристики механических подсистем машины в единую динамическую ФМС;
свойство взаимосвязи подсистем в полной мере не описываются ни одной из моделей классической механики, так как они зависят от мощности и работы диссипативных сил;
контактирующие тела колесо и рельс считаются недеформируемыми, их возможные пространственные смещения определяются исключительно действием упруго-диссипативных связей, наложенных на движения сосредоточенных масс;
для динамической ФМС параметры упруго-диссипативной системы являются переменными;
в единой динамической системе все физико-механические и механо-химические процессы являются взаимосвязанными и одновременно обладают некоторой самостоятельностью.
Процессы сцепления являются существенно нелинейными. Поэтому наиболее достоверные результаты при исследовании данных задач дают методы оценки определяющих процессов и явлений через модельный эксперимент. Физическое моделирование процессов реализации сил сцепления в контакте «колесо – рельс» при воздействии сил, перемещений и колебаний подвижного состава, а также динамического отклика на данное воздействие со стороны элементов ВСП можно реализовать, используя основные положения теории моделирования [1, 4, 22, 23].
Метод анализа размерностей, с введенными условиями динамического подобия, позволяет сложные неоднородные системы превращать в сложные однородные и получать единственное значение масштабных коэффициентов перехода от модели к натуре для каждого из параметров.
При комплексном моделировании, на этапе моделирования механического, теплового и динамического подобия механических систем, необходимо учесть ограничения, определяющие как динамику механической системы без пары сцепления «колесо – рельс» и условия ее определяющие, так и тождественность аналогичных процессов механической части модели и натуры, в том числе коэффициента затухания гармонических составляющих (форм собственных колебаний) модели и натурных поверхностей колеса и рельса.
В
системе
![]() основных единиц выбираются четыре
параметра (базисные), которые оказывают
существенное влияние на исследуемый
процесс, это [8, 24] скорость каченияV,
осевая нагрузка
основных единиц выбираются четыре
параметра (базисные), которые оказывают
существенное влияние на исследуемый
процесс, это [8, 24] скорость каченияV,
осевая нагрузка![]() ,
коэффициент теплоотдачи
,
коэффициент теплоотдачи![]() ,
линейные размеры
,
линейные размеры![]() .
В качестве краевых условий выбираем
температуру в зоне сцепления пары
«колесо – рельс»
.
В качестве краевых условий выбираем
температуру в зоне сцепления пары
«колесо – рельс»![]() ,
контактное давление
,
контактное давление![]() ,
время
,
время![]() ,
то есть
,
то есть![]() ,
что достигается применением одинаковых
параметров натурного образца и модели.
,
что достигается применением одинаковых
параметров натурного образца и модели.
Расчет масштабных коэффициентов перехода от натурного образца к модели производится по разработанной программе "MKP". Результаты представлены в виде скриншота реализации программы расчета масштабных коэффициентов перехода от натуры к модели.
С точки зрения возможности анализа получаемых результатов большой интерес представляет расчет масштабных коэффициентов вручную, так как при моделировании по программе "МКР" невозможно выделить промежуточные результаты расчета, в частности, получаемые константы подобия для моделируемых величин. Результаты расчетов представлены в таблице 5.2.
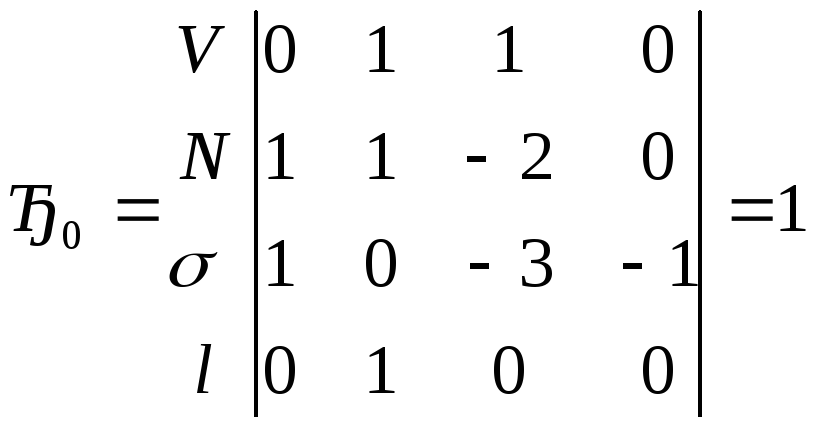
Базисный определитель будет иметь вид
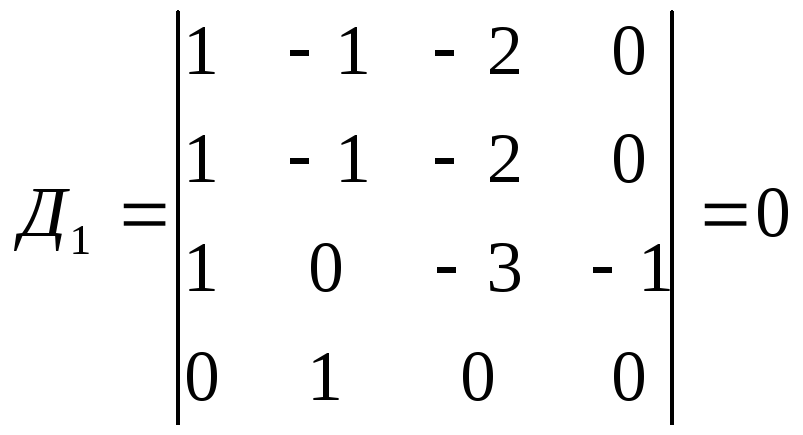
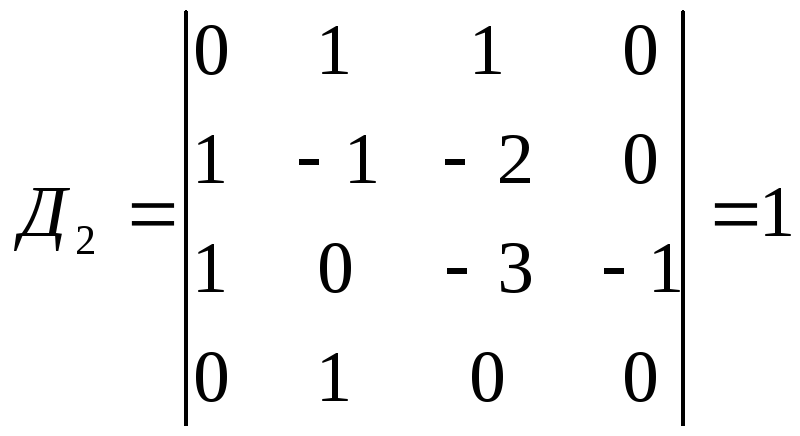
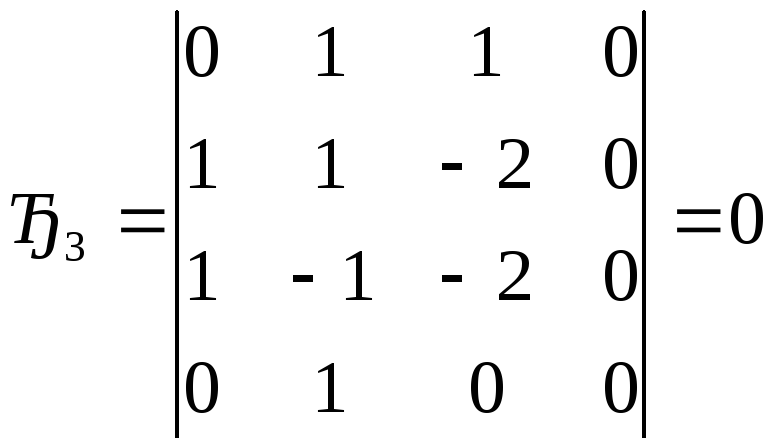
Заменяя
поочередно строки в базисном определителе
на строку с размерностью параметра, для
которого определяется индикатор подобия,
получаем четыре определителя
![]() ,
то есть для параметра
,
то есть для параметра![]() критерий подобия будет иметь вид
критерий подобия будет иметь вид![]()
Объединим с параметрами базисного определителя параметры процесса:
1)
Сопротивление срезу пленок - Т
![]()
![]() ( 5.32)
( 5.32)
Аналогичным образом связываются с базисными параметрами все остальные параметры процесса трения , принятые для моделирования.
1)
Демпфирование ![]()
![]() ( 5.33)
( 5.33)
Масса


![]() (5.34)
(5.34)
Момент инерции I
 (5.35)
(5.35)
Круговая жесткость

![]() (5.36)
(5.36)
Площадь сцепления колеса и рельса Aa

![]() (5.37)
(5.37)
Сила сцепления F

![]() (5.38)
(5.38)
Частота колебаний

 (5.39)
(5.39)
Динамическая вязкость загрязнителей M

![]() (5.40)
(5.40)
Твердость НВ

![]() (5.41)
(5.41)
Время t
![]() ( 5.42)
( 5.42)
Температура
![]() ( 5.43)
( 5.43)
Уравнение подобия, объединившее полученные критерии, состоит из 14 критериев, так как, согласно теореме Бэкингэма, должно быть равно числу параметров за вычетом четырех базисных.
 .
( 5.44)
.
( 5.44)
Таблица 5.2 - Характеристики и константы подобия
|
Характеристика |
Обозна- чение |
Размерность в системе М LT
|
Обозначение по програм- ме "МКП" |
Константа МКП |
|
Скорость качения |
V |
|
V |
|
|
Коэффициент теплоотдачи |
|
|
CG |
|
|
Жесткость линейная |
C |
|
Cl |
|
|
Сопротивл. срезу пленок |
T |
|
T |
|
|
Демпфирование |
|
|
B |
|
|
Масса |
m |
|
m |
|
|
Момент инерции |
J |
|
J |
|
|
Жесткость крутильная |
|
|
Ck |
|
|
Площадь сцепления |
S |
|
AA |
|
|
Сила сцепления |
F |
|
F |
|
|
Частота колебаний |
|
|
Y |
|
|
Твердость |
HB |
|
HB |
|
|
Динамич. вязкость загрязнителей |
M |
|
M |
|
|
Температура объемная |
|
|
|
|
|
Время трения |
t |
|
t |
|
|
Контактное давление |
q |
|
q |
|
|
Градиент температуры |
S |
|
S |
|
Для проверки полученных критериев подобия, составляющие критериальное уравнение (5.44), воспользуемся их сопоставлением с критериями многократно апробированы при исследованиях аналогичных процессов в других областях техники.
Рассмотрим несколько разнородных критериев, характеризующих соотношения силовых, теплофизических процессов и процессы работы при наличии третьего тела (загрязнителей) на поверхности сцепления пары «колесо – рельс»:
1.
Критерий гомохронности, характеризующий
однородность процессов во времени:
![]() ,
гдеV- скорость,t- время,L- путь, в
реализованном моделировании получается,
если критерий времени (5.32) разделить на
критерий пути трения (2.37), то есть
,
гдеV- скорость,t- время,L- путь, в
реализованном моделировании получается,
если критерий времени (5.32) разделить на
критерий пути трения (2.37), то есть![]() .
.
Так как в выражение критерия гомохронности входят параметры V,t,L, то даже если ни один из этих параметров не входит в число базисных, перемножение критериев скорости и времени и деление на критерий пути в результате обеспечивает получение критерия гомохронности.
2. Критерий силы сцепления (5.38) умножим на критерий времени (5.42) и разделим на критерий массы (5.34 ):
![]()
или, подставляя вместо
![]() ,
в результате получаем критерий Ньютона
,
в результате получаем критерий Ньютона![]() .
.
3.
Критерий массы (5.34 ) разделим на критерий
времени (5.42):
![]() ,
подставляя вместо
,
подставляя вместо![]() и
и![]() ,
получаем
,
получаем![]() или, умножив на квадрат критерия
гомохронности
или, умножив на квадрат критерия
гомохронности![]() ,
получаем
,
получаем![]() - критерий Фруда.
- критерий Фруда.
4.
Критерий температуропроводности (5.34)
разделим на критерий пути (5.37) трения:
![]() или заменяя
или заменяя![]() ,
получаем
,
получаем![]() -
критерий Фурье.
-
критерий Фурье.
5. Критерий пути (5.37) разделим на критерий теплопроводности (5.42):
 -
критерий Нуссельта.
-
критерий Нуссельта.