

конспект
.pdfУДК 621.382.002.3(075.5) ББК 32.85
3-13
Утверждено ученым советом ОНМА в качестве учебного пособил по дисциплине «Электронные средства и системы охраны судна» направле ния подготовки 6.070104 «Морской и речной транспорт» 03.06.2010 г., протокол JY» 10.
Рецензенты:
Директор межведомственного научно-учебного Центра МОН и НАП Украины при ОНУ, д.ф-м.н., проф, Лепих Я.И.;
Директор института радиоэлектроники и телекоммуникаций Одесской национальной академии связи им. Попова, д.т.н., проф. Михайлов С.А.;
Замдиректора Центра подготовки и аттестации плавсостава OI1MA к.т.н., проф. Пипченко А.Н.
Завадский В.А.
3-13 Электронные средства и системы охраны судна; Учебное пособие для курсантов судоводительских специальностей / В.А. Завадский, С.Н. Дранчук. - Одесса: ОНМА, 2010. - 168 с.
ISBN 978-966-7591-34-2
В учебном пособии рассмотрены основные нормативные документы, принятие на Дипломатическое конференции по охране человеческой жизни на море в декабре 2002 года (СОЛАС - 74) и отраженные в Международном Кодексе но охране судов и портовых средств (кодекс ОСПС) С целый усиления мер по охране судов и портовых средств. Основное внимание уделено применению и эксплуатации электронных средств и систем, повышающих безопасность мореплавания. Приведены основные Сведения о датчиках охранных и противопожарных систем, систем охранного видео наблюдения, приборов ночного видения, мсталлодстсктороа, электронных регистра торов данных рейса. Изложены основные сведения о принципах работы таких уст ройств, особенностях их работы и эксплуатации. Приведены принципы Применения электронных охранных систем на судах.
Учебное пособие предназначено дня подготовки курсантов направления под готовки 6.070104 «Морской и речной транспорта
УДК 621.382-002.3(075.5) БВК 32.85
|
|
|
3 |
|
ВВЕДЕНИЕ |
|
|
|
ны сУ#0 а " я в ~ |
||
Учебная дисциплина „Электронные средства и системы °*£ |
бакалавр0* |
||
лястся специальной дисциплиной, которая обеспечивает п 0 * г ° о |
дол**1 даТЬ |
||
по направлению 6.070104 „Морской и речной транспорт • |
туЯГьши 5>леК~ |
||
курсантам умения и навыки, необходимые для правильной экс |
^ овязвно с |
||
тронных средств и систем охраны судна. Изучение этой диснии |
^ на цоре ' |
||
возросшим в последние десятилетие уровнем терроризма и И Р Р * |
ч е с к о Й я с И 3 ' |
||
В связи с этим, на Дипломатической конференции по охране чел |
е н й й ДЛ" |
||
ни на море в декабре 2002 года были приняты ряд поправок и до |
„даэнй на |
||
включения в Международную конвенцию по охране целовечес |
|
судов и |
|
море 1974 года (СОЛАС - 74) и |
Международный Кодекс по охра |
^ на |
|
портовых средств (кодекс ОСПС) с целью усиления мер по охр |
|
|
|
М 0 Р е - |
' |
- |
одгетовкв |
Целью изучения дисциплины является изучение требовании к |
уу КО' |
||
офицера по охране судна (Ship Security officer) согласно МеЖДУнаРвд |
и п С р . |
||
дексу по охране судов и портовых средств и изучении с У ш е с 1 В ^ Ю ^т1 н енЫ к спективных. электронных средств и систем, которые могут быть При охране судна.
Дисциплина изучается в 7 семестре и содержит;
•лекции —14 часов;
•лабораторные работы -• 12 часов;
•практические занятия - 8 часов;
•одну расчетномрафическую работу;
•одну модульную контрольную работу.
Итоговая форма оценки знаний курсанта по дисциплине - зачет.
В предлагаемом учебном пособии рассматриваются основные нор»* ные документы Международной Морской Организации но охране судна, пр ципы построения охранных и противопожарных систем, физический при1 работы, конструкции и особенности эксплуатации датчиков охранных и про
««пожарных систем, принципы работы и конструкции металлоискателей, осо бенности построения видеосистем и приборов ночного видения, структура и конструкция регистраторов данных рейса, а также основные требования к этим л.тектронным устройствам.
Содержание учебного подобия отвечает международным требованиям "РР" граммы "1SPS - Models Course, ЗЛ9 Ship Security Officer, 2003 Edition"-
ISBN 978-966-7591-34-2 |
© В.А. Завадский, СИ. Дранчук, 2010 |
21)
•емкостные, в которых создается электрическое поле в зоне чувств
тельности датчика;
•оптические, в которых движущийся объект прерывав! видимое или н
видимое излучение в зоне чувствительности датчика.
Наиболее распространенными датчиками приближения являются индук тивные и емкостные датчики.
2.2.1 Индуктивные бесконтактные датчики приближения
Индуктивные датчики приближения срабатывают только на металлы и чувствительны к остальным материалам, Это увеличивает защищенность и дуктивных датчиков от помех, например, введение в зону чувствительное" выключателя рук оператора, не приведет к ложному срабатыванию.
Согласно статистике 90% дискретных датчиков положения - индуктивные датчики. Это объясняется высокими эксплуатационными характеристиками, надежностью и низкой стоимостью индуктивных датчиков по сравнению 0 другими типами датчиков.
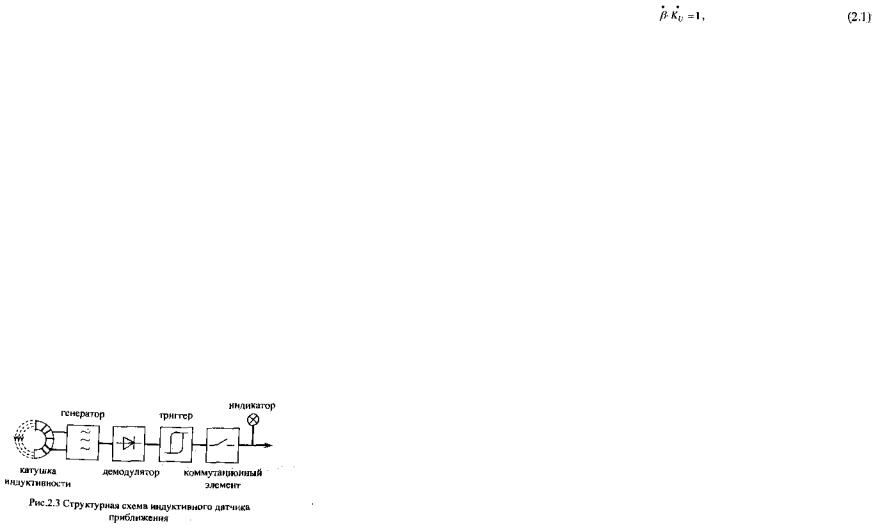
Индуктивный датчик приблюкеяия состоит из (рис.2.3): •
• чувствительного элемента в виде катушки-индуктивности с открытым' магнитопроводом в сторону активной поверхности; •
•генератора гармонических сигналов, выходная частота которого зави* сит от индуктивности чувствительного элемента;
•демодулятора, выделяющего резонансную частоту генератора при от сутствии объектавоздейсгвия;
•порогового устройству (триггера)'.- обеспечивающего переключение состояния датчика при приближении' объекта воздействия на расстоя ние срабатывания;
•коммутационно го элемента, обеспечивающе го коммутацию нагрузки из од ного состояния в
другое;
индикатора со стояния датчика.
Используемые схемы индуктивных датчиков приближения бывают двух типов: генераторные и резонансные.
В генераторном датчике приближения основой является генератор коле баний с двухобмоточным индуктивным чувствительным элементом. Пара метры двух индуктивных катушек, уложенных на один сердечник, рассчиты ваются и подбираются так, что при подключении питания в генераторе само произвольно возникают колебания, т.е. выполняется условие генерации:
21
где Р ~ комплексный коэффициент положительной обратной связи;
К,- — комплексный коэффициент усиления.
Причём, достоинство генератора - в способности к колебаниям в очень широком диапазоне питающих напряжений. Отсюда и получается широкий диапазон допустимых напряжений питания во многих индуктивных датчиках: 10.. .30 В постоянного тока.
При подаче напряжения питания перед активной поверхностью индук тивного датчика образуется переменное электромагнитное поле, создаваемое катушкой индуктивности генератора. При отсутствии металического объекта в зоне чувствительности датчика такие колебания выявляются демодулято ром и блокируют срабатывание триггера. В результате чего коммутационный элемент отключен. При попадании объекта воздействия в зону чувствитель ности датчика, нарушается условие генерации (2.1) и генерации колебаний не возникает, что выделяется демодулятором и вызывает срабатывание триггера, а значит и изменение состояния выхода датчика.
Конструктивное исполнение катушек индуктивности может быть самое разнообразное: обмотки, уложенные в броневой сердечник; обмотки, намо танные на сердечник, произврльной формы; два стандартных сердечника типа ДМ, соединённые между собой; просто обмотки без сердечников. Сердечни ки лишь концентрируют, перераспределяют в пространстве около обмоток потоки рассеяния. Большинство изготовителей применяют сердечник- "чашку", чтобы большую часть потоков сконцентрировать в открытой облас ти "чашки". Здесь и будет.наблюдаться максимальная чувствительность гене ратора к приближению металлов. Однако, главное - подобрать параметры ко лебательного контура так, чтобы обеспечивалось возникновение колебаний при включении питания.
Теперь, если к катушкам близко поднести металлический предмет (объект воздействия), в котором могут наводиться вихревые токи, то способность ко лебательного контура к колебаниям резко падает из-за взаимоиндукции ка тушек и объекта воздействия (изменения положительной обратной связи и нарушения условия.(2.1)). Если продолжить сближение катушек с объектом воздействия, колебания практически прекратятся или их амплитуда умень шится в несколько раз. Таким образом, чувствительность генератора к при ближению металлического или магнитного материала очень высокая, что также является важным достоинством схемы. После демодуляции на выходе демодулятора уже присутствует демодулированный сигнал, который посту пает на вход триггера Шмита. Триггер создает релейный (бинарный) усилен ный выходной сигнал. Генераторной схема названа потому, что чувствитель ным элементом схемы является генератор: еегь колебания в генераторе - объ- е к т адздействия находится вне чувствительной зоны катушек, колебания на рушились - объект воздействия находится внутри чувствительной зоны. ИнАИкатор будет светиться, и к нагрузке будет прикладываться напряжение пи-
П
тания, когда объект воздействия приближен к чувствительному элемент Недостатком такой генераторной с*емы индуктивного датчика приближен! является разное расстояние переключения датчика для разных материал! объекта воздействия - так называемый, коэффициент редукции. Произвол тели приводят его в своих каталогах обычно для материалов из стали, аля
ыыина niTV/un •VafCrr 1 \\ |
_ |
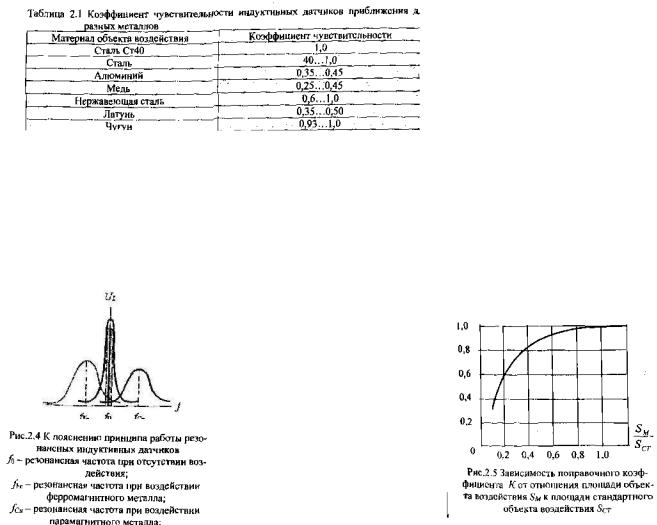
В резонансных индуктивных датчиках приближения чувствительн. элементом является катушка с сердечником, которая, вместе с конденсата, составляет параллельный резонансный контур, залитывадмыЙ; от RC генер. тора несущей частоты. Чувствительный элемент является составной чает генератора несущей частоты. Форма колебаний (синусоидальные, прям* угольные или иные) большого значения не имеет. Несущие колебания гене-1 ратора через разделительный резистор поступают в, резонансный контур. Часгота резонанса контура определяется выражением:
• • f - ^ - ф ^ - v - - - |
•--•••••:•• ::••• (2,2)1 |
и должна быть в пределах регули ровки генератора. На частоте резо нанса внутреннее сопротивление па раллельного резонансного контура наибольшее. Поэтому, амплитуда колебаний будет максимальной (рис.2,4). Реальный LC контур имеет и боковые резонансы, но амплитуда колебаний напряжения в контуре npri боковых резонансах значительно меньше, чем на частоте основного резонанса. Генератор настраивается на частоту колебаний, при которой напряжение на входе порогового элемента максимальное (в отсутст вии объекта воздействия вблизи чув ствительного элемента). Сигнал с L-
23
С контура усиливается усилителем на полевом транзисторе. После усилителя сигнал детектируется диодом и фильтруется резонансным фильтром. Таким образом, на входе порогового элемента существует сигнал постоянного на пряжения, соогветствующий резонансной частоте. В отсутствии объекта воз действия у чувствительного элемента сигнал напряжения на входе порогово го элемента максимален.
После сближения активного чувствительною элемента и объекта воз действия, например, из углеродистой стали, в, материале объекта будут наво диться вихревые токи, которые начинают взаимодействовать с чувствитель ным элементом индуктивного датчика. Вследствие этого, нарушается резо нанс (поскольку индуктивность при внесении стального сердечника возраста ет и резонансная частота уменьшается), уменьшается амплитуда напряжения на LC контуре, уменьшается напряжение ка выходе фильтра я на входе поро гового элемента. При этом происходит переключение выхода датчика.
При использовании объекта воздействия из парамагнитного материала (например, из меди) снижается индуктивность и поэтому увеличивается резо нансная частота, уменьшается амплитуда напряжения на LC контуре, умень шается напряжение на выходе фильтра и на входе порогового элемента. При этом также происходит переключение выхода датчика. .
Вследствие этого расстояние переключения индуктивного, датчика с объектами воздействия из разных металлов практически не изменяется, т. е. коэффициент редукции близок к единице. Однако, резонансная частота, а, значит, амплитуда напряжения на L-C контуре, существенно зависят от ста бильности напряжения питания... Поэтому, реальный допуск на изменение пи тающего напряжения дня таких датчиков не должен быть более *5 %.
. С другой стороны резонансная схема датчиков приближения обладает хорошей термостабильностью, что позволяет использовать такие датчики в
широком диапазоне окружающих температур. |
|
|
|
||
К |
Номинальное расстояние |
воз |
|||
действия (5„), указанное в техниче |
|||||
|
|||||
|
ских характеристиках |
индуктивных |
|||
|
датчиков приближения, относятся к |
||||
|
стандартному объекту |
воздействия - |
|||
|
это квадратная пластина из стали |
||||
|
марки Ст40, толщиной 1мм, сторона |
||||
|
квадрата равна |
большему из значе |
|||
|
ний: диаметру активной поверхности |
||||
|
выключателя или значению 3S„. Если |
||||
|
объект воздействия имеет размеры |
||||
|
меньше стандартного, то расстояние |
||||
|
воздействия S„, следует умножить на |
||||
|
поправочный |
коэффициент |
К |
||
|
(рис.?.. 5). |
|
|
|
|
|
Для надежного и |
однозначного |
|||
24
переключения индуктивного датчика приближения расстояния ерабатыва 0i пускания датчика делают разными - явление гистерезиса (см.рис.2.1).
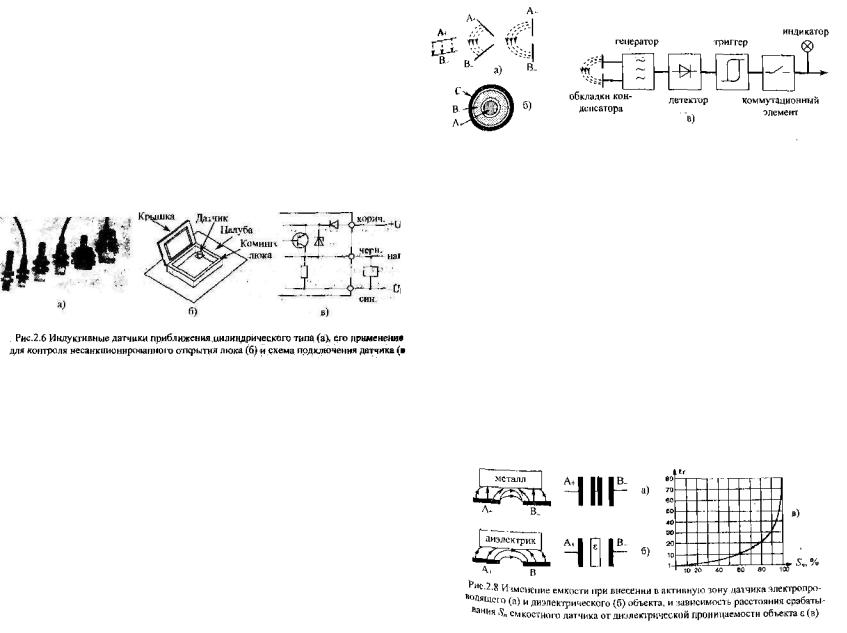
Схема подключения индуктивного датчика приближения приведена рис.2.6, на примере его использования как индикатора закрытого метал ского люка судна. Когда люк открыт, то объект воздействия (крышка располагается вне активной юны датчика и датчик находится в ВЫКЛЮЧИ состоянии. При закрытии люка он попадает в область зоны воздействия да ка, который срабатывает и устанавливает включает исполнительный меха' режим «ЛЮК ЗАКРЫТ». При попытке несанкционированного открытия л датчик отключается, что вызывает срабатывание режима- «О'ГКРЫ ЛЮКА». Для надежного срабатывания данный датчик должен находиться расстоянии меньшем 0,8 S„ or металлической поверхности крышки закр
л ю к а . |
•'•'••. |
2.2.2Емкостные бесконтактные датчики приближения
Вотличие от индуктивных датчиков емкостные датчики приближения с батылают не только на приближение металлических объектов, но и диэлек чёских, таких как бумага, пластмассы, резина дерево, вода, рука человека.
Принцип работы емкостного датчика основан на самовозбуждений гене тора синусоидальных или прямоугольных импульсов при изменении часто дающей емкости генератора, обычно построенного по схеме емкостной точки.
Активная поверхность емкостного датчика образована двумя концентр чески сориентированными металлическими электродами, которые мож представить как электроды "развернутого" конденсатора (рис.2.7 а). Иове ности электродов А и В включены в цепь положительной обратной связи сокочастотного автогенератора, который настроен таким образом, что при сутствии каких-либо объектов возле поверхностей электродов колебания гене ратора отсутствуют (рис.2.7 в), т.е. условие возникновения генерации (2.1) выполняется. Приближение объекта вызывает удлинение элекгрического по
25
рис.2.7 Схема "развернутого" конденсатора (а), структура активного элемента (о) и стру ктурная схема емкостного датчика приближения (в)
А*, В. - потенциальные электроды конденсатора:
С - компенсационный япектрод для защиты датчика от обледенения и выпадения росы
перед поверхностями электродов. Благодаря этому повышается емкость между пластинами А и В и запускается автогенератор, В дальнейшем высокочастот ные колебания фиксированной частоты детектируются, и если значение вы прямленного напряжении превышает порог, то это вызывав-]- срабатывание триггера и изменение состояния выхода коммутационного элемента.
Емкостные датчики срабатывают как от электропроводящих (металличе ских) объектов, так и от диэлектриков.
Объекты из электропроводящих предметов образуют относительно актив ных поверхностей емкостного элемента своеобразный мротивоэлектрод. Таким образом, формируются две емкости, соединенные последовательно, что вызы вает выполнение условия генерации (2.1) и приводит к возникновению генера ции (рис.2.8 а). Благодаря высокой электропроводности Металлы позволяют реализовать большие расстояния срабатывания, причем репродуцирующий фактор (зависимость от типа металла) в отличие от индуктивных датчиков практически отсутствует, т.е. расстояние срабатывания, например, у стали, меДИ и алюминия будет одинаковым.
£сли непроводящий (диэлектрический) материал попадает в в активную зону емкостного датчика, то это приводит к увеличению емкости конденсатора

26
в зависимости от величины диэлектрической проницаемости е (рис.2.8 б), больше диэлектрическая проницаемость объекта, тем большее расстояние батывания датчика (табл.2.2 и рис.2.8 в).
Особо следует отметить влияние воды на емкостные датчики, что св~ наличием большого количества воды в человеческом теле. За счет значит ной степени диссоциации воды на ионы Н+ и ОН", значение диэлектричес проницаемости воды очень большое (с:-80), и поэтому емкостные датчики рошо чувствуют приближение человеческой руки (я ней большое содержа воды) и могут применяться как датчики третьего рубежа охраны.
Таблица 2.2 Диэлектрическая проницаемость некоторых материалов
Но высокая чувствительность к воде емкостных датчиков вызывает сложности при выпадении осадков (инея, льда, росы) из атмосферы при нон' женин температуры, поэтому используются специальная форма электрод чувствительного элемента датчика с компенсационным электродом (см. рис.2, б, электрод С).
Схема подключения емкостного датчика приближения приведена рис.2.9, на примере его использования как элемента охраны вскрытия двер* сейфа. Емкостной датчик располагается на дверце, вблизи замка сейфа, в уто
27
пенном состоянии. При приближении человеческой руки датчик срабатывает, включая сигнал тревоги.
Индуктивные и емкостные датчики приближения широко используются на третьем и втором рубежах охраны, для контроля за состоянием водонепро ницаемых, и противопожарных перегородок, люков, иллюминаторов, дверей и
т.п.
2.3 Бесконтактные датчики контроля помещения
Дня второго рубежа зашиты широко используются датчики контроля объ ема помещений - датчики проникновения, присутствия и движения. Задачей таких датчиков является выявление момента появления постороннего объекта в
охраняемом помещении. , В качестве основных признаков проникновения объекта в охраняемое по
мещения могут использоваться разнообразные свойства человеканарушителя. Основные из них следующие: движение объекта в охраняемом помещении; те пловое поле, излучаемое в ближнем и дальнем инфракрасном диапазоне чело веческим телом; шум, производимый при перемещении объекта внутри поме щения; колебания пола или почвы при прохождении человека - нарушителя.
Исходя из этих признаков датчики контроля помещений используют раз ные физические принципы, но наибольшее распространение получили еледующие типы датчиков (рис.2.10).
• Микроволновые (радиолучевые или.СВЧ). датчики состоят из генератора,
2Я
частота которого составляет единицы или десятки ГГц , антенна котор создает магнитное поле в окружающем пространстве, и приемника, pi стрирующего изменения магнитного поля при появлении объекта воз " ствия. Они могут быть как допперовскими, реагирующими на частот сдвиг отраженной волны при движении человека, так и амплитуд модуляционными, срабатывающими при изменении пространственной :: тины стоячих волн. Оба эти эффекта взаимно связаны, но при работе м роволновых датчиков более распространено использование эффекта Д лера. Микроволновое излучение способно проникать через тонкие не чаллические преграды (деревянные двери, оконные стекла), что дел очень важным правильную установку таких датчиковЗона обнаружени таких датчиков может выходить за пределы помещения, вследствие ч вероятны ложные срабатывания, например, при проходе людей по кори ру вблизи охраняемого помещения.
• Ультразвуковые датчики. Принцип действия ультразвуковых датчик аналогичен микроволновым, за исключением того, что их частота излу иия находится в лиапаюне 20-100 кГц. Такие датчики особенно широ! применялись в 70-80-х годах, однако в последнее время они, по сущееГ вытеснены микроволновыми и пассивными ИК-датчиками, обладающи большей помехоустойчивостью.
• Оптические (инфракрасные) датчики подразделяются на две rpymf Первая - - это активные ИКдатчики, состоящие из одного или несколь* излучателей и приемников, между которыми образуется невидимый л (ИК-барьер), пересечение которого вызывает Срабатывание выходного ле датчика. Вторая группа - пассивные UK-датчики, реагирующпе на те ловое излучение человека в диапазоне длины волны 8-14 микрон (дальн ИК-диапазон). В качестве приемника используется сверхчувствительнпироэлектряческий детектор, способный уловить разницу в несколько сятых градуса между температурой тела человека и "фона" (обычно л верхностью стены, иа которую направлен луч).
• Акустические датчики - измеряют и классифицируют уровень шума, 'голый возникает внутри охраняемого объекта, с помощью высокочувстя тельного микрофона и срабатывают по превышению некоторого заданно порога. Такие датчики требуют сложной настройки, капризны в эксплуа" ции и в настоящее время используются достаточно редко.
• Сейсмические датчики реагируют на колебания почвы или Пола п движении нарушителя. Применяются в основном для охраны периметре Достаточны сложны при эксплуатации. Используются в основном для ко троля больших открытых пространств.
• Датчики двойного действия (комбинированные), преимущество к рых заключается в резком снижении частоты ложных тревог. Это дости ется сочетанием в одном датчике фактически двух или более датчиков, п строенных на различных физических принципах обнаружения. Сигнал тр поги выдается только в том случае, сели одновременно (или в течение й
29
большого интервала времени) срабатывают два датчика. Для реализации этой идеи используемые принципы обнаружения должны быть такими, чтобы большинство помех по-разному воздействовало на каждый состав ляющий комбинацию датчик. Наибольшее распространение получила ком бинация микроволнового и ИК-пассивного принципов обнаружения. Вре мя наработки на ложную тревогу для таких датчиков составляет от не сколько сотен до нескольких тысяч часов, что существенно превышает аналогичный показатель датчиков других типов.
2.3.1 Параметры бесконтактных датчиков контроля помещения
Основными параметрами датчиков контроля помещения являются сле дующие параметры:
1.Дальность действия -это максимальное расстояние, на котором датчик еще может определить посторонний объект. По ГОСТу испытание датчи ков контроля помещений проводят с помощью имитирующей человека "стандартной цели". Это панель размером 30x150 см, равномерно нагре тая до температуры выше (ниже) фоновой на 4 градуса. Когда тестируют бытовые датчики, в качестве "цели" допускается использовать и самого человека весом 50-70 кг и ростом-165-180 см. Считается, что датчик сра ботал, если он среагировал на объект, двигавшийся со скоростью от 0,3 до 3 м/сек (от 1 до 10 км/час).
1.Угол обзора зоны обнаружения в горизонтальной (вертикальной) плоскости - это угол телесного конуса ф, в пределах которого датчик контроля помещения определяет посторонний объект. Этот показатель вместе с предыдущим задает форму зоны чувствительности прибора, Угол обзора зоны обнаружения в зависимости от типа датчика изменяется от 20 до 180°. Большой угол нельзя считать ни достоинством, ни недос татком. Характеристики датчика должны соответствовать помещению и его особенностям. Часто приходится искусственно ограничивать обзор, закрывая часть линзы, чтобы датчик не "видел" нагревательные приборы, блики света или даже приоткрытое окно, через которое поступает холод ный воздух (например, для пассивного ИК - датчика).
3.Зона чувствительности датчика - это объемная пространственная фи гура, в пределах которой датчик определяет стандартный объект, движу щийся в пределах заданных скоростей. Зона чувствительности в зависи мости от типа датчика может иметь разнообразный вид, например (рис.2.11):
• эллипсоида; одного или нескольких, сосредоточенных в малом угле, узких лучей;
нескольких узких лучей в вертикальной плоскости (лучевой барьер); одного широкого в вертикальной плоскости луча (сплошной занавес) или в виде многовеерного занавеса;
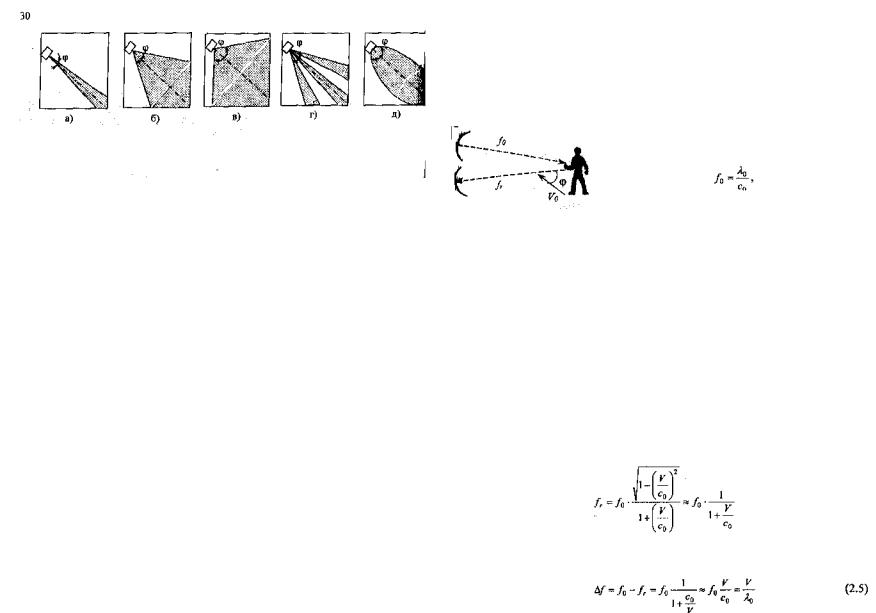
Ряс.2.11 фирма зоны чувствительности датчиков контроля помещения а ~ ОДНОлучевой узкоэонный; б - оДнолучевой нормальный; в - ОДнолучевой
широкоугольный; г-многолучевой (веерный); д-эллипсоидный
• |
нескольких узких лучей в горизонтальной или наклонной плоскости (nj |
|
|
верхноетная одноярусная зона); |
. . |
• |
нескольких узких лучей в нескольких наклонных плоскостях (обьемнА] |
|
. |
многоярусная зона). |
|
4.Скорость движения объекта - это диапазон областей скорости дви
ния, объекта, которую обнаруживает датчик. Этот параметр откосится J
. .дем типам., датчиков контроля помещения, для которых в фиэичесм]
...принципе действия заключено определение движущегося объекта,, * пример, микроволновый, датчик определяет только движущиеся рбьеи если объект, стоит, или передвигается со скоростями вне пределов об ружения датчика, то такой посторонний объект фиксируется датчика как фон, и датчик на негр не реагирует.
,,&•• Хррвень теплового, фона - это минимальный перепад температур, ме
. ду тепловым фоном помещения и тепловым полем .человека, выше кот
.-..,,•, рого датчик может обнаружить объект. Этот параметр ..относится к
типам датчиков, в принципе обнаружения которых заложено измерена^ теплового поля человека - нарушителя. Например, к пассивным ИК - дат
чикам.
Для некоторых датчиков контроля помещения добавляются свои спей
фические параметры, например, для пассивного ИК-датчика важным факторе* является уровень фоновой подсветки, а для микроволнового - рабочая част
передатчика, и т.п.
2.3.2 Микроволновые бесконтактные датчики котроля помещения
Принцип действия микроволнового активного метода обнаружения основав на излучении в окружающее пространство электромагнитного поля СВЧ диапа
зона и регистрации его изменений, вызванных отражением от нарушителя, движущегося в зоне чувствительности датчика. Микроволновые активные дат*
чики, реализующие этот метод, относятся к классу детекторов движения. Перемещение нарушителя приводит к появлению изменяющегося во вре*1
мени отраженного сигнала. Здесь различают два эффекта: изменение npoempawi ственной картины стоячих волн и частотный сдвиг отраженной от движущего"!
ся человека водны {эффект Доплера). Микроволновые датчики, основанные т
31
гистрации первого эффекта,, называются амплитудно-модуляционными, ито го - доплеровскими. Вообще говоря, оба этих эффекта неразрывно связаны,
мот общую природу и одинаковое проявление, и поэтому практически не-
-елимы.
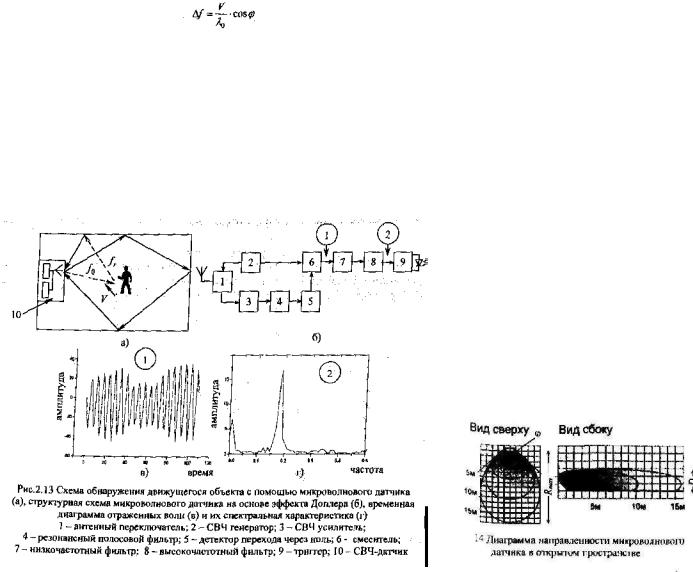
рассмотрим принцип работы датчика на основе эффекта Доплера
с.2.12). |
Антенна СВЧ передатчика излучает электро |
|
|
|
магнитные колебания на частоте^, которая опре |
|
деляется длиной волны XQ. |
|
(2.3) |
где са т-скорость света.
Рис.2.12 эффект Доплера : Когда объект движется по направлению к ан
тенне или от нее, частота отраженного излучения меняется. При движении объекта, от антенны со скоростью V, частота отражен ного сигнала уменьшается, а при приближении объекта -»— возрастает. Это яв ление и называется эффектом Доплера, названным в честь австрийского учен
ного Кристиана Доплера (1803-1853). В то время не существовало акустических приборов для проведения прецизионных измерений. Для доказательства своей теории Доплер посадил трубачей на железнодорожную платформу," а рядом с
путями разместил музыкантов с абсолютным слухом. Локомотив таскал эту
платформу мимо музыкантов с разной скоростью два дня. Музыканты фикси ровали ноты, играемые трубачами, при приближении и удалении платформы. После анализа полученных данных было получены уравнения Доплера. Не
смотря на> то, что эффект Доплера был первоначально, открыт для 'звука, он Справедлив и для электромагнитных волн. Однако в отличие от звуковых волн,
вкорость которых зависит от движения источника звука, электромагнитные
волны распространяются со скоростью света, являющейся абсолютной кон стантой. Согласно теории относительности частота отраженных электромаг нитных волн определяется следующим выражением:
(2.4)
Из-за эффекта Доплера отраженные и падающие волны имеют разную час-
•"•У. Потому разница таких частот, так называемая доплеровская частота, рав на 1
Следовательно, доплеровская частота линейно пропорциональна скорости ения объекта. Например, человек приближается к детектору со скоростью
32
0,6 м/с, частота Доплера при работе датчика в диапазоне 10 ГГц составит око 20 Гц,
Уравнение (2.S) справедливо только для случаев движения объекта прям навстречу излучению детектора. Когда объект приближается к детектору по некоторым углом <р, частоту Доплера можно найтн из следующего выражения:
(2.6
Из этого уравнения видно, что доплеровские детекторы становятся неэ фективными при приближении объектов под углами в, близкими к 90°.
Микроволновые датчики1 сострят из следующих основных элемента (рис:2ЛЗ б):
•СВЧ генератора 2, генерирующих образцовую частотуfy,
•антенной системы 1, создающей электромагнитное поле в окружающее пространстве, принимающей отраженные сигналы, формирующей дна-1 грамму направленности датчика и определяющей форму пространствен ной зоны чувствительности;
•СВЧ приемника 3, регистрирующего изменение характеристик принятого
сигнала; • . • V • • •
• смесителя колебаний 6 образцовой^о и отраженной частот^;
33
I блоков обработки 3-S, 7-8 выделяющих сигналы доплеровской частоты А/ обусловленные движущимся человеком, на фоне помех;
> порогового устройства, которое переключает коммутационный элемент датчика при превышении сигналом доплеровской частоты некоторого по рогового уровня.
Генератор микроволнового датчика предназначен для формирования CD4 сигнала - обычно в сантиметровом диапазоне длин волн (2... 11 ГГц), в послед нее время производителями датчиков начали осваиваться и более коротковол новые диапазоны (24...25 ГГц), Первоначально в микроволновых датчиках ис пользовались генераторы на диодах Гана, в настоящее время производители перешли на транзисторные генераторы. Современные СВЧ генераторы позво ляют формировать стабильный сигнал с требуемыми характеристиками при ма лых габаритах и низком потреблении.
В качестве антенной системы R микроволновых дат'шках обычно исполь зуется единственная совмещенная приемо-передающая антенна. В большинстве современных датчиков применяются микрополосковые антенны, обладающие меньшими габаритами, весом и стоимостью по сравнению с широко использо вавшимися рацее рупорными антеннами. Однако рупорные антенны продол жают применяться некоторыми: производителями датчиков и в настоящее вре мя, так как обеспечивают несколько более высокую точность формирования диафаммы направленности.
Вообще говоря, формы зон чувствительности микроволновых детекторов не отличаются, таким многообразием. Конфигурация зоны чувствительности микроволновых датчиков представляет собой объемное тело, напоминающее по форме эллипсоид., В идеале от антенной системы требуется излучение (и, соот ветственно, прием) только в переднее полупространство без заметного заднего и бокового излучения (с целью минимизации ложных срабатываний).
Ятя такой идеальной антенной системы зона чувствительности представ ляет собой объемное тело каплевидной формы, характеризующееся углами обзора ф (в горизонтальной и вертикальной плоскостях), длиной Rma> (максималь ной дальностью действия) и шириной D (высотой) (рис.2.14), Именно эти пара метры обычно приводятся в документации на микроволновые датчики (иногда Д°ЛОЛНЯКУТСЯ величинами контролируемых датчиком площади и объема поме
щения). Типичные значения
размеров зоны чувствительно сти для микроволновых дат чиков составляют: Ляш=10..,15 м, />5...10 м, <р60о...100°. Зона чувствительности, фор мируемая реальной антенной системой, отличается от иде
Рис.2. альной - из-за заднего и боко вого излучения/приема она
приобретает искаженную
34
форму, что может снизить максимальную дальность действия датчика д (0,03...0,1)/U,.
Приведенные выше характеристики справедливы для свободного п странства. При расположении датчика в помещении форма зоны чувствител ности существенно искажается. Из-за отражения от ограждающих конструкци (коэффициент отражения по полю от кирпичных и железобетонных стен ее сгавляет 0,3...0,6) электромагнитное поле "заполняет" с большей или меньше степенью равномерности практически вес помещение, если размеры этого п метения не превышают размеры зоны чувствительности. С другой сторон' тонкие перегородки из легких материалов, деревянные двери, стекла, шторы являются существенной преградой для электромагнитного поля, поэтому зон чувствительности может распространяться-и за пределы охраняемого помет ния, что может привести к ложным срабатываниям, например при проходе л- дей по коридору вне охраняемого пространства. В то же время, крупногабарит ные предметы (шкафы, сейфы и т.п.), находящиеся в помещении, создают "те ни" (зоны нечувствительности); Все этодалжно^учитываться при выборе мест установки и количества используемых датчиков.
Типичные значения'.регистрируемых микроволновым датчиком вели доплеровского сдвига лежат в диапазоне частот сетевой помехи 50/60 Гц и гармоник. Для борьбы :с этими помехами современнее микроволновые датчи оснащаются режекторншми фильтрами (в том числе адаптивными) гармони сети. Другими источниками помех, вызывающими ложные срабатывания доп лсровских микроволновых датчиков, являются отражения от вибрирующих, ко леблющихся и движущихся .хорошо отражающих объектов.
Такими источниками ложных срабатываний могут быть, например:
•установочная арматура включенных ламп дневного света;
•работающее электрооборудование, создающее, вибрацию;
•потоки дождевой воды на стеклах;
•движение воды в пластиковых трубах;
•мелкие животные и птицы.
Микроволновый датчик на основе эффекта Доплера работает следующим образом (рис.2.11 б).
Резонансный СВЧ генератор 2 излучает электромагнитные волны через пе реключатель 1 в передающую антенну. Волны, отраженные от различных объ ектов достигая приемной антенны, преобразуются в электрические сигналы н усиливаются СВЧ усилителем 3. Резонансный полосовой фильтр 4 подавляет шум, который находится вне области проверяемых частот и устраняет постоян ную составляющую с выхода усилителя. Так как отраженный сигнал может быть модулирован по амплитуде, детектор перехода через нуль 5 подавляет эту нежелательную амплитудную модуляцию и преобразует выходной сигнал фильтра в модулированный по фазе сигнал. Следует отметить, что если ампли туда сигнала, отраженного от двигающегося объекта меньше чем амплитуда сигнала, отраженного от неподвижных объектов, выходной сигнал полосового фильтра будет модулирован по фазе. В противном случае, он будет модулвро-
35
по частоте. В системах безопасности, сигнал, отраженный от движущихся ектов может быть от 3 до 20 раз слабее, чем сигнал, отраженный от непод-
: объектов.
Выход детектора перехода через нуль 5 заведен на вход смесителя б. ВыОдной сигнал СВЧ генератора используется как опорный сигнал для смесителя |> ][0Лученный после смешения сигнал содержит большое число гармоник, в Юм числе и колебания с доплеровской частотой (рис.2.11 в). Низкочастотный фильтр 7 выбирает доплеровскиЙ сигнал с выходного сигнала смесителя, по давляет высокочастотные компоненты в частотном спектре доплеровского сиг нала и устраняет влияние фазового шума детектора перехода через нуль. Далее доплсровский сигнал поступает на высокочастотный фильтр 8, который огра ничивает нижнюю .частоту в доплеровском спектре. Это эффективно подавляет влияние низкочастотного шума на работу датчика. Выходной сигнал высоко частотного фильтра (рис.2.13 г) анализируется пороговым триггером 9 для ге нерации сигнала тревоги.
Недостатком микроволновых датчиков является сложность их настройки, и ложные срабатывания на движения мелких животных и насекомых, движение водяных .потоков в трубах идо окнам и т.п.
В настоящее время.микроволновые,датчики широко используются в ком бинации с пассивными И К-датчиками.
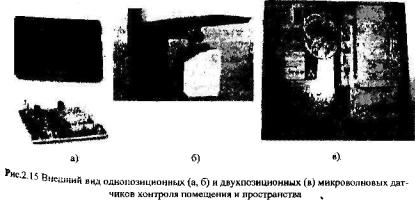
Микроволновые датчики используются для контроля доступа в помещение (2 уровень охраны) или для охраны периметра (1 уровень охраны). В первом случае обычно используются одновозиционные микроволновые датчики, в ко торых приемник и передатчик. СВЧ сигнала располагаются в одном корпусе, а •о втором - двухпозшдионные? в которых приемник и передатчик СВЧ сигнала Располагаются на расстоянии друг от друга, обычно в пределах прямой види- "<«ги (рис.2.15).
36
23.3 Пассивные ИК-датчикн контроля помещений
Пассивные ИК - датчики, называемые также оптоэлсктронными (ийф красными), относятся к классу детекторов движения и реагируют на теплое излучение движущегося человека. Принцип действия этих датчиков основан ь1 регистрации изменения во времени разницы между интенсивностью излучения от человека (его температурное поле) и фонового теплового излу
ния.
В настоящее время ИКпассивные датчики являются самыми популярн ми, они составляют неотъемлемый элемент охранной системы практически к ждого объекта. Для того чтобы нарушитель был обнаружен ИК-пассивны датчиком, необходимо выполнение следующих условий:
• нарушитель должен пересечь" Й поперечном направлении луч зоны чувс вительности датчика; ••••'••,' ••-.-• .-. •
»движение нарушителя должно происходить в определенном интервскоростей (обычно от 1 д»10кМ/час); •"'
• чувствительность датчика должна' бьйъ достаточной для регистрации ницы температур поверхности Тёла; нарушителя (с-учетом влияния е одеиады) и фона (стень^ пол) Шычй'6 минимальна^ разность' темпера-" составляет от I до 5 °С. •'-• ''-' """
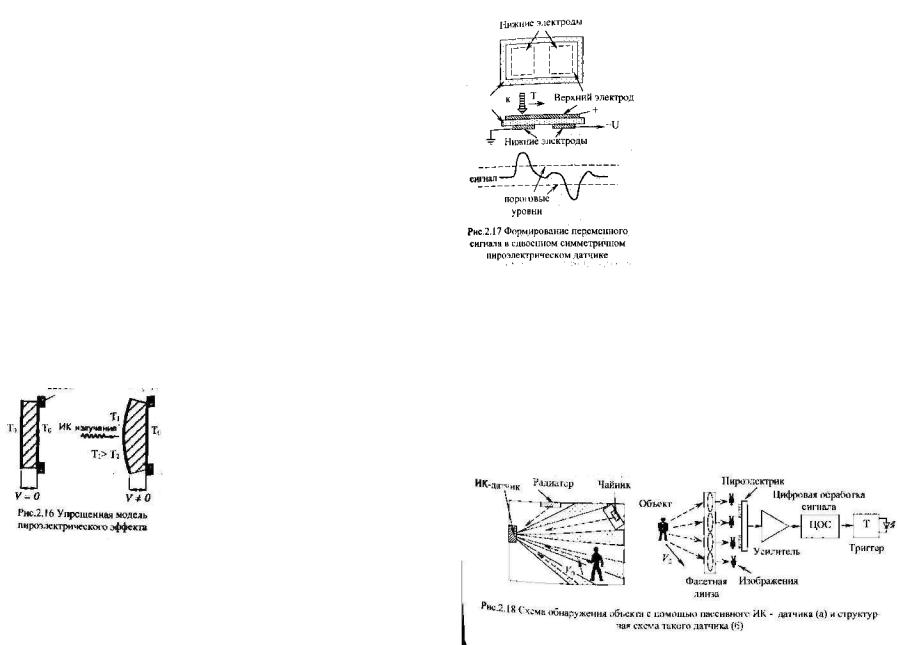
2.3,3.1 Пироэлектрический приемник
Для регистрации теплового Поля объекта, используется пироэлектрически эффект, который заключается в возникновений разности потенциалов на
опора кладках конденсатора, в котором в качестве д- электрика используется пироэлектрйк. В упро шенном виде можно считать, что пироэлектри чество появляется вследствие теплового расши рения материалов. Поглощенное тепло заставля ет расширяться- переднюю часть чувствительн" го элемента (рис.2.16). Поскольку все пнроэлек трйки также обладают пьезоэлектрическим свойствами, возникшее в результате расширен напряжение приводит к появлению зарядов н электродах элемента. Это означает, что меж"
электродами, расположенными с двух сторон элемента, возникает разность п тенциалов:
Ш-х-йТ, |
(2.7 |
где %— пироэлектрический коэффициент.
К сожалению, пьезоэлектрический эффект здесь играет отрицэтелыг роль. Поскольку если на датчик действуют паразитные внешние механически силы, они также приводят к появлению зарядов на электродах, которые час трудно отличить от полезного сигнала.
37
Для того чтобы разделить заряды, формируемые тепловым и пьезоэлектриче ским способами, пироэлектрические датчи ки обычно изготавливают симметричными - сдвоенными или счетверенными (рис.
2.17), т.е. внутри корпуса размещают два ^Громеюри или четыре абсолютно одинаковых элемен
та, выходы которых подключают к элек тронной схеме. При одновременной (син фазной) подаче на эти элементы одинако вых входных сигналов (помех) они будут взаимно уничтожаться, поэтому на выходе датчика сохранится нулевой (или постоян ный) уровень сигнала.
Основная идея датчика заключается в том, что тепловой поток Т, создаваемый при движении объекта, дойдет до разных чувст вительных элементов в разные моменты времени, в результате чего на выходе детек-
тора уровень сигнала изменится!.
2.3.3.2 Принцип работы пассивного ИК-датчика
Пассивные . ИКтдатчики состоят из следующих основных элементов (Рис.2.18 6):
•оптической системы, формирующей диаграмму направленности датчика и определяющей форму и вид пространственной зоны чувствительности;
•Пироэлектрического датчика, регистрирующего тепловое излучение че ловека;
•блока усиления и обработки сигналов пироэлектрического датчика ЦОС, выделяющего сигналы, обусловленные движущимся человеком, на фоне помех естественного и искусственного происхождения;