

Глава 11. Квадратичные формы.
При
изучении теории систем линейных уравнений
мы видели, что каждое уравнение системы
представляло собой выражение, в которое
входили переменные величины: x1,x2,…,![]() в первой степени:
в первой степени:
![]() =
=![]() ,
,
причём
начало таким конструкциям положили
простейшие: с участием только двух
переменных величин x1,x2.
По мере развития теории было получено
обобщение таких выражений для произвольного
числа участников x1,x2,…,![]() .
Выражения
.
Выражения ![]() имеют специальное название – линейные
формы.
имеют специальное название – линейные
формы.
Какова
история появления квадратичных форм?
Ответ даёт практика деятельности
человека! Начало было положено в теории
кривых 2-го порядка, располагаемых
произвольно на плоскости прямоугольной
системы координат ![]() .
Общим выражением для всех таких кривых
явилось выражение:
.
Общим выражением для всех таких кривых
явилось выражение:
![]() , (1)
, (1)
где
коэффициенты при переменных величинах
x,
y: ![]() ,
,
![]() - действительные числа. Для развития
теории кривых 2-го порядка объектом
исследования определили левую часть
выражения (1):
- действительные числа. Для развития
теории кривых 2-го порядка объектом
исследования определили левую часть
выражения (1):
![]() =
=![]() .
(2)
.
(2)
Заметили, что все кривые 2-го порядка имеют центр: такую точку, что параллельным переносом начала координат в эту точку можно получить для той же кривой аналитическое выражение в виде:
![]() =
=![]() ,
(3)
,
(3)
именно его и назвали квадратичной формой для переменных x, y: каждое слагаемое имеет или квадрат переменной величины, или произведение двух переменных величин.
Изучение выражений (3) обнаружило их свойство: за счёт поворота системы координат на некоторый угол удаётся избавиться от слагаемого, содержащего произведение переменных, и получить, так называемый, канонический вид выражения для квадратичной формы:
![]() =
=![]() .
(4)
.
(4)
Заметим
отдельно, что поворот системы координат
на угол ![]() можно толковать как линейное преобразование
переменных:
можно толковать как линейное преобразование
переменных:
![]() или
или ![]() ,
или
,
или ![]() ,
,
где ![]() - невырожденная матрица преобразования:
её определитель равен 1.
- невырожденная матрица преобразования:
её определитель равен 1.
Изучение поверхностей 2-го порядка привело к ближайшему обобщению рассматриваемых выражений:
![]() =
=![]() →
→ ![]() =
=![]() .
(5)
.
(5)
Замечание:
для простоты восприятия алгебраического
образа обозначение коэффициентов в
выражениях (2)![]() (5)
не изменяется.
(5)
не изменяется.
В
пространстве для получения канонического
вида квадратичной формы применяют три
поворота системы координат на углы
Эйлера. 
Пусть
имеем две системы координат ![]() ,
считаем эту систему координат исходной,
и
,
считаем эту систему координат исходной,
и ![]() - система координат, подвижная
относительно исходной – вращается
относительно точки O.
- система координат, подвижная
относительно исходной – вращается
относительно точки O.
Положение
системы ![]() относительно
относительно ![]() можно было бы определить девятью
направляющими косинусами подвижных
осей, то есть косинусами тех углов,
которые каждая из подвижных осей образует
с неподвижными осями: это определило
бы квадратную матрицу линейного
преобразования переменных x,
y,
z.
можно было бы определить девятью
направляющими косинусами подвижных
осей, то есть косинусами тех углов,
которые каждая из подвижных осей образует
с неподвижными осями: это определило
бы квадратную матрицу линейного
преобразования переменных x,
y,
z.
Значительно
проще и удобнее определять положение
системы ![]() относительно
относительно ![]() при помощи углов
Эйлера
при помощи углов
Эйлера ![]() ,
,![]() ,
,
![]() ,
которые называют (взято из астрономии!):
,
которые называют (взято из астрономии!):
![]() – угол прецессии,
– угол прецессии, ![]() – угол нутации,
– угол нутации, ![]() – угол собственного вращения.
– угол собственного вращения.
Это
делают так. Обозначим линию пересечения
плоскостей OXY и ![]() через
ON – линия
узлов. Систему
осей
через
ON – линия
узлов. Систему
осей ![]() переводят в положение
переводят в положение ![]() при помощи трех вращений:
при помощи трех вращений:
первый
поворот: систему
осей ![]() поворачиваем вокруг
оси OZ на угол
поворачиваем вокруг
оси OZ на угол ![]() так, чтобы ось OX совпала
с линией узлов ON:
система
так, чтобы ось OX совпала
с линией узлов ON:
система ![]() переходит в систему
переходит в систему ![]() :
:
 или
или
 ,
или
,
или  ,
,
где ![]() - невырожденная матрица преобразования:
её определитель равен 1;
- невырожденная матрица преобразования:
её определитель равен 1;
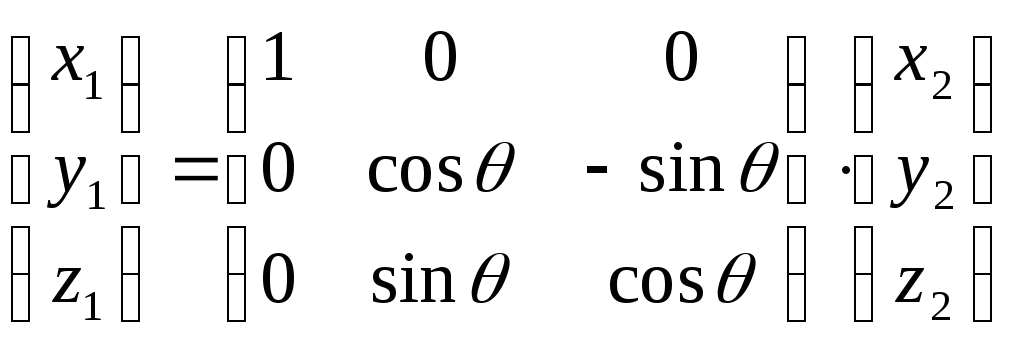
второй
поворот: систему
осей ![]() поворачиваем вокруг
оси ON на угол
поворачиваем вокруг
оси ON на угол ![]() так, чтобы ось OZ совпала
с осью
так, чтобы ось OZ совпала
с осью ![]() :
система
:
система ![]() переходит в систему
переходит в систему ![]() :
:
 или
или
 ,
или
,
или  ,
,
где ![]() - невырожденная матрица преобразования:
её определитель равен 1;
- невырожденная матрица преобразования:
её определитель равен 1;
третий
поворот: систему
осей ![]() поворачиваем вокруг
оси
поворачиваем вокруг
оси ![]() на угол
на угол ![]() так, чтобы ось ON совпала
с осью
так, чтобы ось ON совпала
с осью ![]() :
система
:
система ![]() переходит в систему
переходит в систему ![]() :
:
 или
или
 ,
или
,
или  ,
,
где ![]() - невырожденная матрица преобразования:
её определитель равен 1.
- невырожденная матрица преобразования:
её определитель равен 1.
Учитывая
свойства линейных преобразований,
определить полное линейное преобразование,
как преобразование, заданное матрицей:
![]() ,
причём, невырожденное.
,
причём, невырожденное.