Адаптивные драйверы.
Задержки импульсов в сигнальных проводниках определяются скоростью электромагнитной волны, RC-постоянной времени проводника и выходным сопротивлением драйвера. При компоновке и трассировке кристаллов СНК наиболее длинные и ответственные сигнальные цепи (синхросигналы и системные шины данных) реализуются в соответствии с принципом обратного масштабирования. Чем длиннее проводники, тем они шире, а переходные окна между уровнями металлизации дублируются для уменьшения сопротивления. В такой конструкции задержка импульса, связанная со скоростью электромагнитной волны и RC параметрами проводника, не превышает 10пс на 1мм длины. Рассеянная емкость проводника составляет 100÷150 фФ на 1мм длины. При выходном сопротивлении драйвера 100 Ом и более, задержка импульса определяется нагрузочной способностью драйвера. Типовая величина выходного сопротивления драйверов – 1кОм.
Синхронная работа СФ блоков в СНК обеспечивается при определенных ограничениях на задержки сигналов в линиях связи. Возможны три варианта управления задержками сигналов в линиях связи: избыточное увеличение мощности драйверов, буферизация линий связи с использованием повторителей сигналов и применение адаптивных драйверов на выходах СФ-блоков. Первый вариант требует значительного увеличения потребляемой электрической мощности. Второй вариант технически сложен и требует создания отдельной системы питания повторителей в поле сигнальных проводников. Оптимальным можно считать третий вариант, обеспечивающий минимально необходимую мощность драйверов и отсутствие дополнительных активных элементов в промежутках между СФ-блоками.
Принцип действия адаптивного драйвера состоит в том, чтобы формировать одинаковые фронты и соответствующие им задержки распространения сигнала между СФ-блоками в СНК вне зависимости от емкости нагрузки.
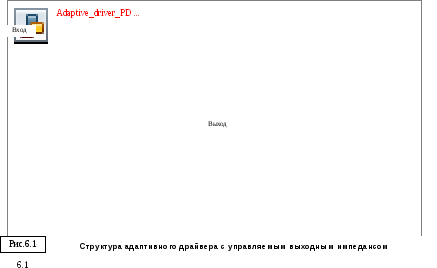
Для решения проблемы распространения сигналов между СФ-блоками в СНК разработана структура адаптивного драйвера с управляемым импедансом, рис.6.1.
Драйвер с управляемым выходным импедансом построен на реверсивном счетчике и управляемых инвертирующих буферах с третьим состоянием. В схеме физически присутствуют опорный элемент, формирующий эталонный фронт. Опорный элемент включает драйвер с наименьшей нагрузочной способностью и эталонную емкостью нагрузку (С_эталона). Такой же выходной фронт адаптивному драйверу необходимо сформировать независимо от внешней нагрузки (С_нагрузки). Один драйвер минимальной нагрузочной способности всегда подключен к внешней нагрузке, а остальные способны подключаться или отключаться в зависимости от сигнала управления. Инвертор на входе блока формирует сигнал, который поступает разными путями на эталонный драйвер и эталонную нагрузку и одновременно на входы драйверов с изменяемой нагрузочной способностью. На выходах эталонного и рабочего каналов мы получаем сигналы, которые нагружены на эталонную (С_эталона) и неизвестную (С_нагрузки) емкости соответственно. Эти 2 сигнала подаются на входы фазового детектора. С выхода фазового сигналы поступают на реверсивный счетчик, формирующий код, управляющий матрицей драйверов, с изменяемой нагрузочной способностью. Код активирует или переводит в состояние с высоким импедансом соответствующую группу драйверов. Наконец в системе наступает баланс, то есть задержка управляемого сигнала становится равной задержке эталонного. Поскольку данная система цифровая, то точность настройки остается на уровне влияния младшего разряда управляющего кода. Заранее неизвестная емкость нагрузки не может быть меньше эталонной. Диапазон регулировки адаптивного драйвера с фазовым детектором определяется разрядностью управляющего кода. В схеме на рис.6.1 использован 5-разрядный реверсивный счетчик – соответственно допустимая величина емкости нагрузки может изменяться в 32 раза.
Блок инициализации (начальных установок).
Для корректной работы цифровых блоков в СНК необходимо предусмотреть сигнал установки в начальный момент времени (при включении питания).
Система инициализации обычно реализуется отдельным СФ-блоком. В общем случае в СНК не предусмотрен внешний сигнал сброса в начальный момент работы системы. Схема инициализации может быть объединена с генератором опорной частоты, тогда сигнал начальной установки появляется при нарастании напряжения питания (при включении схемы), и сбрасывается по первому импульсу опорного синхросигнала.
Сигнал начальной установки в активном уровне блокирует несанкционированный синхросигнал в СНК. Пороговое устройство на выходе опорного генератора снимает сигнал начальной установки, и подает опорный синхросигнал только через несколько микросекунд после того, как на опорном кварцевом генераторе опорной частоты появилось напряжение питания. Таким образом, синхроимпульсы начинают поступать на входы тактируемых элементов СНК после того, как завершилась начальная установка, а генератор опорной частоты вошел в стационарный режим работы.