

- •Мобильные системы радиосвязи
- •Оглавление
- •Введение
- •1. Беспроводные сети связи
- •1.1. Мобильные системы связи
- •1.1.1. Мобильные системы связи первого поколения
- •1.1.2. Мобильные системы связи второго поколения
- •1.1.3. Мобильные системы связи третьего поколения
- •1.2. Общее представление сети связи
- •1.2.1. Модель OSI-7 для открытых сетей связи
- •1.2.2. Уровни модели OSI-7
- •1.2.3. Реализация модели OSI-7 для радиосетей
- •1.3. Функциональная схема сети радиосвязи
- •Заключение
- •2. Цифровые модулирующие сигналы
- •2.1. Представление цифрового сигнала во временной и частотной областях
- •2.2. Виды и параметры цифровых сигналов
- •2.2.1. Виды цифровых сигналов
- •2.2.2. Параметры цифровых сигналов
- •2.2.3. Спектральная плотность мощности цифровых сигналов
- •2.3. Прохождение цифрового сигнала по линейным цепям и межсимвольная интерференция
- •2.3.1. Искажения сигнала в линейных цепях
- •2.3.2. Межсимвольная интерференция
- •2.3.3. Критерий Найквиста
- •2.3.4.Ограничение полосы частот цифрового сигнала
- •Заключение
- •3.Узкополосные модулированные сигналы
- •3.1. Общие свойства модулированных сигналов
- •3.1.1.Определение модулированного сигнала во временной и частотной областях
- •3.1.2. Функциональные схемы модуляторов и демодуляторов
- •3.1.3. Ограничение спектра модулированного колебания
- •3.1.4. Энергия и расстояние между символами модулированного сигнала
- •3.2. Импульсная амплитудная модуляция РАМ
- •3.3. Фазовая модуляция PM
- •3.3.1. Общее представление фазомодулированного сигнала
- •3.3.2. Бинарная фазовая модуляция BPSK
- •3.3.3. Квадратурная фазовая модуляция QPSK
- •3.3.4. Дифференциальная бинарная фазовая модуляция DBPSK
- •3.3.7. Амплитудно-фазовая модуляция QAM
- •3.4. Частотная модуляция FM
- •3.4.2. Частотная модуляция минимального фазового сдвига MSK
- •Заключение
- •4. Модулированные сигналы с расширенным спектром
- •4.1. Сигналы с непосредственным расширением спектра DSSS
- •4.1.1. Основные свойства DSSS сигналов
- •4.1.2. Система связи с DSSS сигналами
- •4.2. Широкополосные сигналы со скачками частоты FHSS
- •4.3. Сверхширокополосные сигналы UWB
- •4.4. Многомерные сигналы
- •4.4.1. Общее описание многомерных сигналов
- •4.4.2. Многомерная ортогональная частотная модуляция OFDM
- •Заключение
- •5. Синтез и преобразование частот
- •5.1. Функциональная схема ФАПЧ и синтезатора частоты
- •5.2. Основное уравнение синтезатора частоты
- •5.3. Параметры синтезатора частоты
- •5.3.1. Полоса удержания (захвата)
- •5.3.2. Ошибка частоты и фазы в установившемся режиме
- •5.3.3. Переходные характеристики и время установления частоты
- •5.3.5. Устойчивость
- •5.4. Частотная модуляция в синтезаторе частоты
- •5.5. Преобразование частоты в петле ФАПЧ
- •Заключение
- •6. Распространение радиоволн в условиях города
- •6.1. Методы анализа распространения радиоволн
- •6.2. Расчет дальности радиосвязи в модели "большого расстояния"
- •6.2.1. Расчет дальности связи по методике МККР
- •6.2.3. Расчет теневых зон радиосвязи
- •6.2.4. Распространение радиоволн внутри здания
- •6.3. Анализ распределения поля в модели "малого расстояния"
- •6.3.1. Энергия принимаемого сигнала в многолучевом радиоканале
- •6.3.2. Параметры многолучевого канала
- •6.3.3. Типы фединга в многолучевом канале
- •Заключение
- •7. Детектирование и прием цифровых сигналов
- •7.1. Критерий максимального правдоподобия
- •7.2. Корреляционный и согласованный прием
- •7.3. Согласованный фильтр
- •7.4. Достоверность приема бинарной цифровой информации в условиях белого гауссовского шума
- •7.7. Когерентное детектирование
- •7.7.1. Когерентное детектирование BPSK сигнала
- •7.7.2. Схема Костаса оптимального детектирования сигналов с угловой модуляцией
- •7.8. Тактовая синхронизация
- •Заключение
- •Прием сигналов в условиях фединга
- •8.1. Разнесенный прием в широкополосных каналах
- •8.1.1. Статистика принимаемых сигналов
- •8.1.2. Достоверность приема информации
- •8.1.3. Методы реализации разнесенного приема
- •8.2.1. Общие принципы работы эквалайзера
- •8.2.2. Линейный и нелинейный эквалайзеры
- •8.3. Интерливинг
- •Заключение
- •9. Стандарты на радиоканал мобильной связи
- •9.1. Требования к параметрам передатчика
- •9.2. Требования к параметрам приемника
- •Заключение
- •Литература
лучше, чем остальные. При увеличении числа уровней для MSK сигнала происходит увеличение полосы частот, занимаемой сигналом, в то время как для амплитудной и фазовой модуляции занимаемая полоса частот уменьшается пропорционально log2(M ) . Увеличенная полоса частот и
является платой за увеличение достоверности приема информации MSK сигнала. Однако если для амплитудной или фазовой модуляции также допустить возможность увеличения рабочей полосы частот, то выигрыш в достоверности приема для MSK становится не столь очевидным. Интуитивно это следует хотя бы из того, что возможность использования большей полосы частот для РАМ и PM сигналов позволит использовать и большую скорость передачи того же объема информации. Следовательно, появится возможность повторной передачи символов, что, очевидно, приведет к соответствующему повышению достоверности приема информации.
7.7. Когерентное детектирование
Анализ схемы приемника на рис.7.1 не является полным, если не указан способ реализации когерентного детектирования и тактовой синхронизации [9]. Работа когерентного детектора требует наличия опорной частоты, с точностью до фазы совпадающей с центральной частотой модулированного сигнала. Следовательно, приемник должен включать в себя схему высокочастотной синхронизации, называемую также схемой восстановления несущей, которая обеспечивает выделение из модулированного сигнала несущей частоты.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Оценим требования к точности фазировки опорных квадратурных компонент. Принимаемый сигнал в квадратурном виде представляется в соответствии с (3.4):
sRF (t) = x(t)×cos(wct) - y(t)×sin(wct). |
(7.57) |
В приемнике формируются опорные квадратурные компоненты, необходимые для когерентного детектора:
soc (t) = cos(wct + f); sos (t) = -sin(wct + f), |
(7.58) |
где φ - случайный сдвиг фазы между принимаемым и
опорным колебаниями.
Выполняя перемножение (7.57) на (7.58) и пренебрегая высокочастотными компонентами, получим квадратурные компоненты демодулированного сигнала в baseband диапазоне:
rc (t) = x(2t) cos(f) + y2(t) sin(f); rs (t) = x(2t) cos(f) - y2(t) sin(f) . (7.59)
Из уравнения (7.59) следует, что наличие постоянного или случайного фазового сдвига f ¹ 0 между центральной
частотой модулированного колебания и частотой опорного колебания приводит к потере мощности демодулированного
сигнала пропорционально величине cos2 (f) и межсимвольной интерференции пропорционально sin(f) .
7.7.1. Когерентное детектирование BPSK сигнала
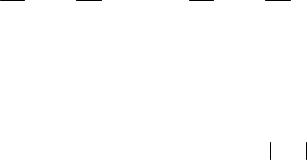
Простейший способ детектирования бинарного фазомодулированного колебания - восстановление несущей в схеме умножения частоты и демодуляция с помощью квадратурного детектора. Функциональная схема восстановления несущей при демодуляции BPSK сигнала показана на рис.7.15.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
BPSK |
|
|
|
|
|
2f0 |
||
|
|
|
|
|
|
|
|
|
сигнал |
Умножитель |
|
|
Полосовой |
|
|
|
ФНЧ |
|
частоты на 2 |
|
|
фильтр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f0 |
|
|
|
|
|
|
|
|
|
|
Делитель |
|
|
|
ГУН |
|
|
|
|
|
частоты на 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.7.15. Восстановление несущей частоты BPSK сигнала
Входные и выходные сигналы на умножителе равны sin (t) = Acos[ωct + πw(t)];
sout (t) = A2{ |
1 |
+ cos[2ωct + 2πw(t)]}. |
(7.60) |
|
2 |
|
|
Из уравнения (7.60б) следует, что умножение на 2 "снимает" модуляцию и сигнал удвоенной частоты уже не зависит от модулирующего сигнала w(t) . Полосовой фильтр
выделяет из общего спектра умножителя сигнал удвоенной частоты 2fc. Узкополосная петля ФАПЧ служит для удаления из спектра сигнала удвоенной частоты паразитных комбинационных составляющих, расположенных в непосредственной близости от несущей. На выходе делителя на 2 имеется чистый сигнал на несущей частоте fc, синхронный с центральной частотой модулированного сигнала.
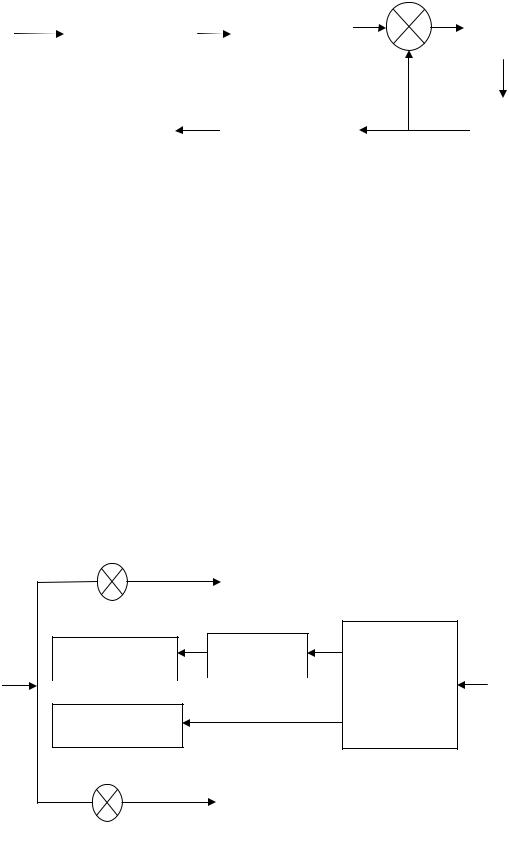
Типовая микросхема квадратурного детектора имеет структуру, показанную на рис.7.16.
x(t)
 sin(ωct)
sin(ωct)
|
Делитель на 2 |
|
Инвертор |
Умножитель LO |
r(t) |
|
|
|
|
|
|
|
|
на 2 |
|
|
|
|
|
|
|
|
|
|
Делитель на 2
 cos(ωct)
cos(ωct)
y(t)
Рис.7.16. Квадратурный детектор
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Опорный синхронизированный сигнал на частоте, равной центральной частоте модулированного колебания, поступает на вход LO. Умножитель на 2, инвертор и делители на 2 совместно обеспечивают формирование квадратурных компонент опорного сигнала. Этот метод формирования квадратурных компонент значительно более широкополосный по сравнению со сдвигом фаз с помощью реактивных элементов, так как практически не зависит от величины опорной частоты. Как показано в главе 3 (см. рис.3.3, уравнения (3.4) - (3.6)), на выходах детектора на рис.7.11 получаются квадратурные компоненты комплексной огибающей g(t) = x(t) + jy(t) сигнала с фазовой
или частотной модуляцией любого вида.
Основными источниками погрешности работы квадратурного детектора (см. рис.7.11) являются несимметрия каналов, зависящая от различия коэффициентов усиления каналов, и флуктуации фазы, вызванной случайными колебаниями опорной частоты относительно центральной частоты принимаемого модулированного сигнала. Эффективное значение случайной фазовой ошибки определяется известным уравнением [4]:
|
f2 |
|
|
θ = ± 2 òL( f ) df , |
(7.61) |
||
|
f1 |
|
|
где L( f ) - спектральная плотность шума опорной частоты.
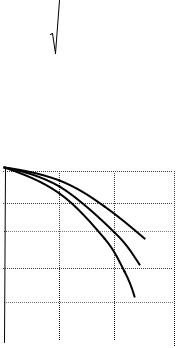
На рис.7.17 показана зависимость вероятности ошибочного приема информации от эффективной фазовой ошибки при
BER |
|
|
|
|
|
||
10–1 |
|
|
|
|
|
||
10–2 |
|
|
1 |
|
|
||
10–3 |
|
|
|
|
|||
|
|
2 |
|
|
|||
10–4 |
|
|
|
|
|||
|
|
3 |
|
|
|||
10–5 |
|
|
|
|
|||
|
|
|
|
|
|||
10–6 |
|
|
|
|
|
E/N, дБ |
|
0 |
4 |
8 |
12 |
||||
|
|||||||
Рис.7.17. Достоверность приема BPSK сигнала:
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com