

Идентификация и диагностика систем
.pdfНа практике точно реализовать импульсное воздействие u(t) = cδ (t) на вход объекта, близкое по свойствам к идеальному δ- импульсу
δ (τ ) = |
|
0, t |
≠ 0 |
; |
∞ |
(3.11) |
|
∞, t |
= 0 |
∫δ (t)dt =1 |
|||
|
|
|
−∞ |
|
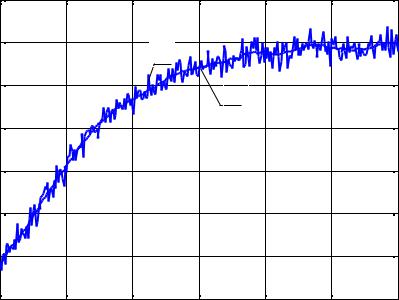
невозможно, что объясняется техническими причинами. Из-за отличий при реализации входного импульса экспериментально снятая импульсная характеристика отличается от теоретической. На рисунке 3.5 представлено сопоставление экспериментальной импульсной переходной характеристики (1) апериодического объекта первого по-
рядка и теоретической (2), построенной по выражению w(t) = |
k |
e |
− |
t |
|
|
|
||||||
|
T . |
|||||
T |
||||||
|
|
|
|
|
||
Рисунок 3.5 Графическая идентификация по импульсной весовой функции
При идентификации многомерного объекта для определения его переходной матрицы Wвыхвх (t) или импульсной переходной матрицы
φвых проводится эксперимент с nвх циклами, где nвх - количество входов. На каждый из входов объекта последовательно во времени с интервалами, превышающими время затухания собственных движений объекта, подаются ступенчатые воздействия или короткие им-
51
пульсы для определения Wвыхвх (t) или φвых , соответственно. Регистрация реакций на выходах объекта обеспечивает определение всех элементов искомых матричных функций.
3.4Влияние аддитивного шума
Вреальных условиях проведения эксперимента сигнал на выходе
объекта y(t) наблюдается в условиях наличия различного рода помех
η(t) , которые ранее условились считать аддитивными |
|
y(t) = x(t) +η(t), |
(3.12) |
где x(t) - полезный сигнал.
Характеристиками шума полагаются математическое ожидание M[η(t)] = 0 и среднеквадратичное отклонение M[η2 (t)] =σ 2 . Шум вносит в результаты измерений неопределенность, определенную стандартным отклонением σ. Эту неопределенность можно уменьшить путем повторения экспериментов несколько раз [8, 74]. Рассмотрим проведение серии из k экспериментов, последовательно начинающихся в моменты времени t1 , t2 ,..., tk . Найдем значения выходных сигналов, зафиксированных через время τ после начала каждого испытания:
y(ti +τ ) = x(ti +τ ) +η(ti +τ ) |
(3.13) |
или |
|
yi = xi +ηi , i =1,2,...k. |
(3.14) |
Среднее значение выходной величины по k испытаниям находит- |
|
ся как: |
|
yk = |
1 |
k |
1 |
k |
1 |
k |
|
∑ yi = |
|
∑(xi +ηi ) = x + |
|
∑ηi . (3.15) |
|
|
k i =1 |
k i =1 |
k i =1 |
|||
Считая детерминированную составляющую сигнала постоянной во всех испытаниях, получаем, что математическое ожидание среднего значения зашумленного сигнала равно его истинному значению, а среднеквадратичное отклонение уменьшается в k раз:
52
M [ yk ] = x; |
M [( yk − x)2 |
] = |
σ |
2 |
. |
(3.16) |
|
|
|
|
|||||
|
k |
|
|||||
|
|
|
|
|
|
|
|
Отметим, что этот результат справедлив только для некоррелируемых шумов.
Для выделения полезного сигнала широкое распространение получили методы, основанные на применении различных способов сглаживания по одной реализации переходного процесса [8, 64].
Рассмотрим метод сглаживания на основе скользящего усреднения. Он заключается в последовательном усреднении экспериментальных данных y(t) на некотором интервале Т в окрестности текущего значения времени t. Сглаживание осуществляется по формуле:
) |
1 |
|
t + T |
/ 2 |
|
|
||
y ( t ) = |
|
|
|
∫ |
y (τ ) d τ . |
(3.17) |
||
T |
||||||||
|
t − T |
/ 2 |
|
|
||||
Для дискретных сигналов усреднение на некотором интервале |
||||||||
времени m t выполняется по формуле: |
|
|
|
|||||
y)j +m / 2 |
|
|
1 |
m |
|
|||
= |
∑ y j +k , |
(3.18) |
||||||
|
|
|
||||||
|
|
|
|
m +1 k =0 |
|
|||
где y j , y j , j = 0,1...N - соответственно истинное значение переходного процесса в j -ый момент времени и его оценка, полученные при дискретизации с интервалом
t = t j − t j−1 = const ; j = 0,1...N . |
(3.19) |
Пример 3.1
Рассмотрим задачу сглаживания зашумленной переходной функции
объекта с передаточной функцией W ( p) = |
25 |
. |
36 p2 +15 p +1 |
s1=tf([25],[36 15 1])% непрерывная передаточная функция объекта T_end=60;% интервал измерений
dt=0.2;% шаг дискретизации t=0:dt:T_end;% массив дискретного времени
N=length(t);% размер выборки
53
u=ones(N,1);% моделирование единичного входного воздействие v=randn(N,1); % моделирование помехи
y=lsim(s1,u,t)+v;% моделирование выходного воздействия с учетом аддитивной выходной помехи
m=10; % задание числа точек для усреднения h(1)=y(1);
for i=2:m % ycpeднение начального участка del=i-1;
h(i)=sum(y(1:i+del))/( 2*del+1);
end;
for i=m+1:N-m % основной алгоритм ycpeднения «скользящим средним»
h(i)=sum(y(i-m:i+m))/(2*m+1);
end;
for i=N-m+1:N % ycpeднение конечного участка del=N-i;
h(i)=sum(y(i-del:N))/( 2*del+1);
end; plot(t,y,':b',t,h,'-b'); grid;
Полученные результаты представлены на рисунке 3.6.
54
30 |
|
|
|
|
|
|
25 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
10 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
-50 |
10 |
20 |
30 |
40 |
50 |
60 |
|
|
|
Время, с |
|
|
|
Рисунок 3.6 Зашумленная (1) и сглаженная (2) переходные характеристики объекта
Графическое представление результатов сглаживания переходной характеристики в условиях действия аддитивной помехи при заданном числе точек усреднения m =10 показывает (рисунок 3.6) удовлетворительное качество рассмотренного алгоритма усреднения.
Приведенный алгоритм усреднения реализует сглаживание про-
цесса линейным фильтром с длиной памяти T |
= m t |
и амплитудно- |
|||||
фазовой частотной характеристикой вида: |
|
|
|
||||
Wф ( jω) = |
|
2 |
sin |
ωm |
t |
. |
(3.20) |
ωm t |
|
|
|||||
|
2 |
|
|
|
|||
В этом случае необходимо правильно выбрать величину выборки |
|||||||
m , т.к. при небольшом значении |
m рассмотренный алгоритм дает |
||||||
оценки, близкие к истинным, но процесс сглаживания имеет худшее качество, а с увеличением m алгоритм лучше сглаживает, но увеличивается смещение оценок.
Следует заметить [64], что получаемые при таких процедурах усреднения оценки y(t) всегда являются смещенными, т.к. любая процедура сглаживания соответствует прохождению зашумленного сиг-
55
нала через некоторый фильтр, отделяющий низкочастотный полезный сигнал от более высокочастотной помехи.
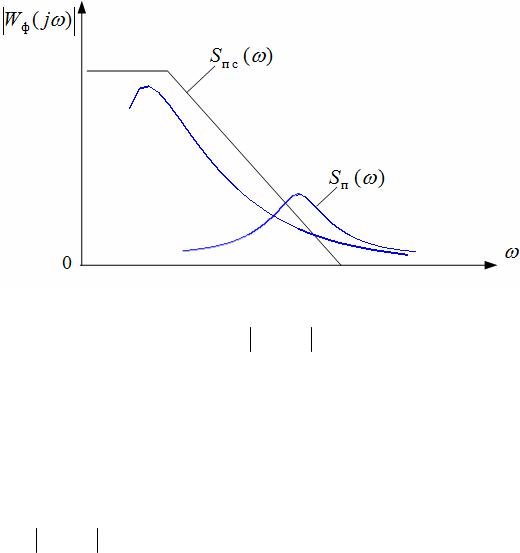
Рисунок 3.7
Частотная характеристика фильтра Wф ( jω) и частотные спектры полезно-
го сигнала Sпс (ω) и помехи Sп (ω)
На рисунке 3.7. приведена графическая интерпретация процесса фильтрации полезного сигнала со спектром Sпс (ω) и высокочастот-
ной помехи со спектром Sп (ω) низкочастотным фильтром с характеристикой Wф ( jω) . При малой полосе пропускания фильтра помеха
лучше отфильтровывается, но подавляется и часть полезного сигнала. При большой полосе пропускания, наоборот, сохраняется спектр полезного сигнала, но и воздействие помехи становится большим. Это приводит к смещению оценок отфильтрованного сигнала относительно полезного.
Также часто используются и другие методы сглаживания – метод сглаживания четвертыми разностями, метод сглаживания с использованием разложения в ряд Фурье, разложения с использованием полиномов Чебышева [8, 64]. Применение рядов Фурье и полиномов Чебышева дает лучшее качество, но и требует значительно больших объёмов вычислений.
56

3.5 Идентификация объектов с помощью частотных характеристик
Частотный метод идентификации линейных систем основан на работах Найквиста и Боде и использует в качестве исходной частотные или спектральные характеристики.
Частотная характеристика объекта может быть представлена совокупностью амплитудно-частотной характеристики A(ω), представляющей зависимость отношения амплитуд гармонических сигналов на входе и выходе объекта от частоты колебаний в установившемся режиме и фазо-частотной характеристики ϕ(ω), отражающей зависимость сдвига фаз между входными и выходными гармоническими сигналами от частоты. Частотные характеристики динамических объектов, как правило, определяются в режиме активного эксперимента подачей на вход объекта гармонического сигнала, частота которого изменяется в определенном диапазоне, и регистрации выходной реакции.
Для линейного стационарного объекта вход-выходное соотношение определяется через частотную передаточную функцию:
y( jω) = W ( jω)u ( jω), |
(3.21) |
где u( jω) = F {u(t)}= ∞∫u(t)e− jωt dt - частотный спектр (преобразо-
−∞
вание Фурье) входного сигнала объекта; y( jω) = F{y(t)} - частотный спектр выходного сигнала; W ( jω) = F {w(t)} - частотная передаточная функция объекта.
Из (3.21) следует, что частотную характеристику объекта
W ( jω) = uy(( jjωω)) можно найти экспериментальным путем на основе
частотных спектров измеренных входных и выходных сигналов u(t) и y(t). Основной сложностью при таком подходе является невозможность формирования входного воздействия u(t) , частотный спектр которого был бы непрерывным на бесконечном интервале изменения
57
частот ω. Частотная характеристика объекта W ( jω) также должна быть непрерывной во всей полосе частот, что обеспечить технически практически невозможно. Поэтому, вследствие наблюдения сигналов u(t) и y(t) только на ограниченном отрезке времени, возникают значительные ошибки их измерения.
В соответствии с этим, в реальных условиях воздействие полигармонических сигналов в широком диапазоне изменения частот заменяют последовательным применением моногармонических воздействий u(t) = u0 sin ωit с разными частотами ω =ωi и исследуют реакцию на них. На выходе объекта в установившемся состоянии будут
наблюдаться гармонические колебания той же частоты |
|
y(t) = ym (ωi ) sin[ ωit + ϕ(ωi )]. |
(3.22) |
В этом случае частотная передаточная функция, представленная в комплексном виде, определяется зависимостью:
|
|
|
|
W ( jω) = |
y( jω) |
= |
ym (ωi )e jϕ (ωi ) |
= |
|
W ( jω) |
|
e jϕ (ωi ) , (3.23) |
|
|
|
||||||||||||
u( jω) |
u0 |
||||||||||||
где |
|
|
|
|
|
- амплитудно- и фазо- |
|||||||
|
W ( jω) |
|
= mod W ( jω); ϕ(ω) = arg W ( jω) |
||||||||||
|
|
||||||||||||
частотные характеристики объекта. В соответствии с (3.23) модуль
функции W ( jωi ) при заданной частоте тестового сигнала ωi |
вычис- |
||||||
ляется по формуле: |
|
|
|
||||
|
W ( jωi ) |
|
= |
ym (ωi ) |
, |
(3.24) |
|
|
|
||||||
|
|||||||
|
|
|
|
u0 |
|
||
а аргумент W ( jωi ) определяется величиной фазового сдвига выходных колебаний исследуемого объекта.
Прямые методы получения амплитудной или фазовой частотных характеристик, основанные на непосредственном измерении амплитуды и фазы отклика на синусоидальный сигнал, могут быть использованы в ограниченном числе случаев, когда помехи, искажающие измерения, отсутствуют. В реальных условиях проведения экспериментов объект всегда подвергается воздействию шумов. В этом случае, для получения достоверного результата выгоднее использовать
58
другие алгоритмы обработки данных, например, методы, основанные на гармоническом анализе сигналов [19]. Эти методы основаны на измерении основной гармоники установившихся колебаний на выходе исследуемого объекта при гармоническом воздействии на входе. Обработка выходного периодического сигнала производится с помощью гармонического анализатора, позволяющего определять параметры одной или нескольких гармоник.
Частотная характеристика объекта представляется в следующем виде:
W ( jω) = W ( jω) e jϕ (ω ) = W ( jω) cos ϕ(ω) +
+ j |
|
W ( jω) |
|
sin ωt = c(ω) + jd (ω), |
(3.25) |
|
|
где c(ω) = W ( jω) cos ϕ(ω) , d (ω) = W ( jω) sin ϕ(ω) являются подлежащими определению параметрами частотных характеристик объ-
|
|
|
2 |
|
2 |
d (ω) |
|
||
|
|
|
|
|
|||||
екта |
W ( jω) |
= {c |
|
(ω) + d |
|
(ω)} и ϕ(ω) = arctg |
|
|
для ряда час- |
|
|
|
|||||||
|
|
|
|
|
|
c(ω) |
|
||
тот ωi . |
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
Параметры c(ωi ) и d(ωi ) можно найти, подавая на вход объекта тестовый сигнал u(t) = u0 sin ωit и применяя фильтрацию Фурье к выходному сигналу y(t) . Такая процедура фильтрации реализуется умножением y(t) , соответственно, на sin ωit и cos ωit и усреднением по целому k числу периодов:
|
|
|
c(ω |
|
) = |
2 |
|
T |
y(t)sin ω |
tdt |
|
|
|
|
|
|
|
|
|
|
∫0 |
, |
|
||||
|
|
|
|
u0T |
|
|
|||||||
|
|
|
|
i |
|
|
i |
|
|
|
|||
|
|
|
|
|
|
2 |
|
T |
|
|
|
|
|
|
|
|
d (ωi ) = |
|
|
|
∫ y(t) cos ωitdt |
, |
(3.26) |
||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
u0T 0 |
|
|
|
|
||
где T = kT |
, |
T = |
2π . |
|
|
|
|
|
|
|
|
|
|
i |
|
i |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
Положительным свойством таких алгоритмов идентификации является использование неограниченного частотного диапазона, что позволяет применять их также в области низких частот, характерных
59
для рабочих процессов многих промышленных технических объектов. Рассмотрим, как получаемые с помощью данного алгоритма оценки искажаются случайными составляющими сигнала, практически всегда имеющими место в реальных промышленных условиях. Когда выход объекта y(t) искажается аддитивным белым шумом η(t) , M [η]= 0 , то в результате фильтрации вместо детерминированных величин c(ωi ) и d(ωi ) будут определяться случайные величины
~ |
~ |
|
|
|
|
|
c (ωi ) и d (ωi ) [74]: |
|
|
|
|
|
|
|
с~(ωi ,T ) = c(ωi ) + |
2 |
T |
|
||
|
∫η(t) sin ωi tdt ; |
|
||||
|
|
|
|
|||
|
|
u0T 0 |
(3.27) |
|||
|
~ |
2 |
|
T |
||
|
|
|
||||
|
d (ωi ,T ) = d (ωi ) + |
|
|
|
∫η(t) cos ωi tdt. |
|
|
|
|
|
|
||
|
|
|
u0T 0 |
|
||
Определение математического ожидания по всему ансамблю наблюдений показывает, что оценки являются несмещенными:
|
|
~ |
|
|
|
|
|
|
|
2 |
|
|
T |
|
|
|
|
|
||
M [c |
]= M |
[c(ωi )]+ |
u T |
|
|
|
∫M [η(t)]sin ωitdt = c(ωi ); |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
(3.28) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
~ |
|
|
|
|
|
|
|
2 |
|
|
|
T |
|
|
|
|
|
|
M [d |
]= M |
[d (ωi )]+ |
|
|
∫M |
[η(t)]cos ωitdt = d (ωi ). |
||||||||||||||
u T |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
||
Оценим дисперсию оценок на частоте ωi : |
|
|
||||||||||||||||||
|
2 |
|
|
|
|
|
~ |
|
2 |
|
|
|
|
4 |
|
|
|
2 |
|
|
σ |
|
(c) = M [(c − c) |
|
] = |
|
|
|
|
|
M [(η(t) sin ωitdt ) |
|
] = |
||||||||
|
|
u02T 2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.29) |
||||
|
|
|
|
4 |
|
|
T T |
M [η(t)η(τ )]sin ω |
|
|
||||||||||
|
|
|
= |
|
|
t sin ωτdtdτ |
|
|
||||||||||||
|
|
|
2 |
|
2 |
∫∫ |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
|
|||
|
|
|
|
u0 T |
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В (3.29) M [η(t)η(τ )] - корреляционная функция аддитивного шума, и ее величина которой равна:
|
2 |
, t −τ = 0; |
(3.30) |
Kηη (t −τ ) = M [η(t)η(τ )]= σ |
|
||
0. |
|
|
|
С учетом соотношения (3.30), вычисляя двойной интеграл в (3.29), можно определить дисперсию оценок c(ωi ) :
60