

§11. Силы упругости
Силы упругости — силы, возникающие при упругой (обратимой) деформации тел.
Закон Гука: сила упругости тела прямо пропорциональна упругой деформации тела.
Закон Гука для винтовой пружины
На рис.11.1 показана винтовая пружина, закрепленная одним концом на опоре в т.А. К незакрепленному концу пружины приложена (рис.11.1а) внешняя сила Fвнеш, направленная по оси пружины от опоры. Пружина находится в растянутом состоянии (может быть в сжатом состоянии, если Fвнеш будет направлена к опоре).
Внешняя сила Fвнеш равна по модулю силе упругости пружины и направлена в противоположную сторону:
![]() (11.1)
(11.1)
Сила упругости пружины приложена к внешнему телу, вызывающему растяжение (или сжатие) пружины.
Сила упругости пружины
![]() (11.2)
(11.2)
где к — жесткость винтовой пружины; r0 = (r r0) — перемещение незакреплённого конца пружины (рис.11.1,в), находящейся в растянутом (может быть в сжатом) состоянии под действием внешней силы; r0, r — радиус-векторы незакреплённого конца пружины, находящейся в ненагруженном (рис.11.1,а) и нагруженном (рис.11.1,б) состоянии соответственно. Начало координат (см. рис.11.1б) находится в закрепленном на опоре конце пружины — точке А (в общем случае начало координат может находится в любой точке).
Единица жесткости пружины — ньютон на метр: [к] = Н/м.
Удлинение пружины при растяжении (укорочение при сжатии)
![]() (11.3)
(11.3)
где L0 — длина ненагруженной пружины (см. рис.11.1,а), L — длина нагруженной пружины (см. рис.11.1,б,в).
Модуль силы упругости пружины прямо пропорционален модулю удлинения при растяжении (модулю укорочения при сжатии) пружины:
![]() (11.4)
(11.4)
Если начало координат находится в точке, где находился незакрепленный конец ненагруженной пружины, то
Fупр = кr. (11.5)
В этом случае проекция силы упругости на ось Ох
![]() (11.6)
(11.6)
где х — координата (называемая также смещением) конца пружины, к которому приложена внешняя сила.
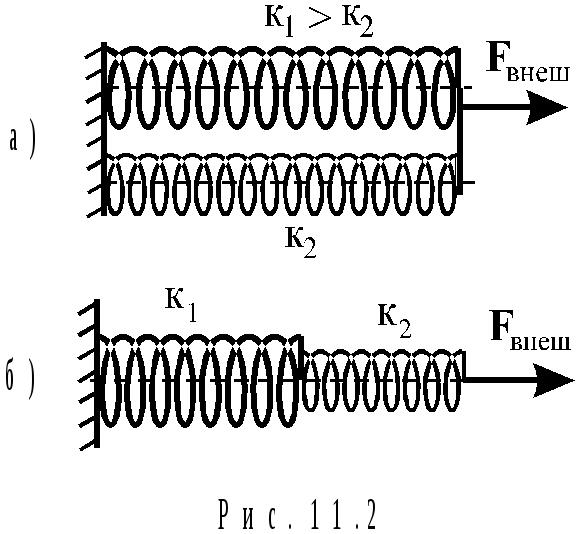
Жесткость системы соединенных пружин
При параллельном соединении пружин (рис.11.2,а) жесткости пружин складываются:
![]() (11.7)
(11.7)
при последовательном соединении пружин (рис.11.2б) складываются величины, обратные жесткостям пружин:
![]() (11.8)
(11.8)
где кi — жесткость i–й пружины, n — число пружин.
§12. Силы тяготения
Закон всемирного тяготения
Между двумя материальными точками действуют силы тяготения (гравитационные силы), являющиеся силами взаимного притяжения, модули которых прямо пропорциональны произведению их масс и обратно пропорциональны квадрату расстояния между ними. Силы направлены по линии, проходящей через эти материальные точки.
М атериальные
точки (при
использовании в законе всемирного
тяготения) — тела, максимальные линейные
размеры которых много меньше расстояния
между ними: Li max
<< r (i =
1,2).
атериальные
точки (при
использовании в законе всемирного
тяготения) — тела, максимальные линейные
размеры которых много меньше расстояния
между ними: Li max
<< r (i =
1,2).
На рис. 12.1 показана материальная точка (м.т.) массой m1, находящаяся в начале координат, и м.т. массой m2, которая находится в точке, радиус-вектор которой r.
Сила тяготения Fтяг, действующая со стороны первой материальной точки на вторую:
![]() (12.1)
(12.1)
где G гравитационная постоянная, равная 6,6710-11 Нм2/кг2, r расстояние между м.т. (модуль радиус-вектора r).