

§3. Ускорение
Среднее ускорение <a> — ВФВ, равная отношению приращения скорости v к промежутку времени t, за который это приращение произошло:
![]() (3.1)
(3.1)
Ускорение (мгновенное) a — ВФВ, равная пределу отношения приращения скорости v к промежутку времени t, за который это приращение произошло, при бесконечном уменьшении промежутка времени:
![]() (3.2)
(3.2)
Единица ускорения — метр на секунду в квадрате: [ a ] = м/с2 .
У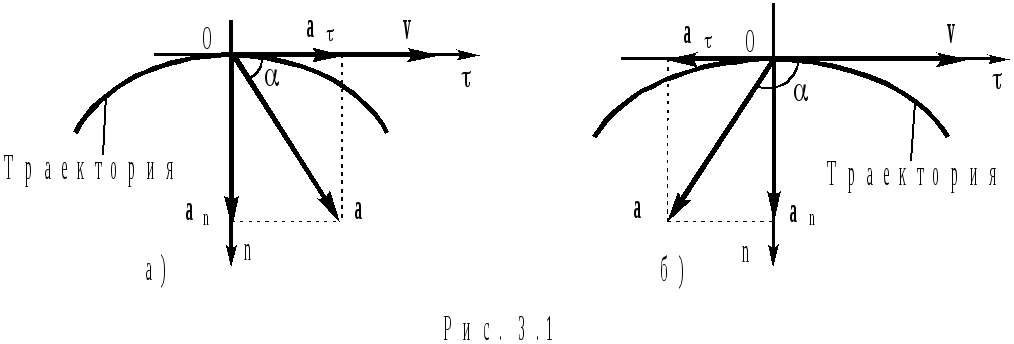 скорениеa может
быть разложено на взаимно перпендикулярные
тангенциальное a
и нормальное
an
ускорения (показаны на рис.3.1,а и 3.1,б):
скорениеa может
быть разложено на взаимно перпендикулярные
тангенциальное a
и нормальное
an
ускорения (показаны на рис.3.1,а и 3.1,б):
a = a + an. (3.3)
Тангенциальное ускорение a характеризует изменение модуля скорости. Оно направлено по касательной к траектории:
a = aед, (3.4)
где a — проекция ускорения на ось О, совпадающую по направлению со скоростью v (см. рис.3.1):
![]() (3.5)
(3.5)
где v — приращение модуля скорости материальной точки; ед — единичный вектор, направленный по оси О:
ед
![]() (3.6)
(3.6)
Проекция ускорения на ось О может быть больше нуля (рис.3.1a), меньше нуля (рис.3.1б) или равна нулю (например, при равномерном движении м.т. по окружности — см. §7).
Модуль тангенциального ускорения равен модулю проекции ускорения на ось О:
![]() (3.7)
(3.7)
Нормальное ускорение an характеризует изменение скорости по направлению. Оно направлено перпендикулярно скорости м.т. к центру кривизны траектории:
an = annед, (3.8)
an — проекция ускорения на ось Оn, направленной к центру кривизны траектории (см. рис.3.1):
![]() (3.9)
(3.9)
где R — радиус кривизны траектории в данной точке, nед — единичный вектор, направленный по оси Оn.
Проекция ускорения на ось Оn всегда положительна и равна модулю нормального ускорения:
![]() (3.10)
(3.10)
Д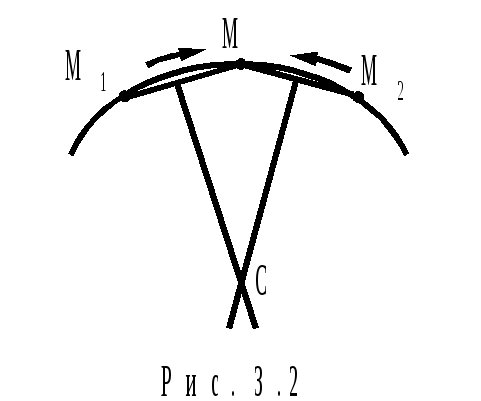 ля
определения центра и радиуса кривизны
траектории в т.М (рис.3.2) на траектории
берутся две близкие к т.М точки М1
и М2
и через эти три точки проводится
окружность. Центром этой окружности
(т. С) является точка пересечения
перпендикуляров к серединам отрезков
ММ1
и ММ2.
При сближении точек М1
и М2 с
точкой М, точка С будет стремиться к
некоторому предельному положению —
точке С0
(на рис.3.2 не показана).
ля
определения центра и радиуса кривизны
траектории в т.М (рис.3.2) на траектории
берутся две близкие к т.М точки М1
и М2
и через эти три точки проводится
окружность. Центром этой окружности
(т. С) является точка пересечения
перпендикуляров к серединам отрезков
ММ1
и ММ2.
При сближении точек М1
и М2 с
точкой М, точка С будет стремиться к
некоторому предельному положению —
точке С0
(на рис.3.2 не показана).
Точка С0 называется центром кривизны траектории в т.М, а предельное значение радиуса окружности — радиусом кривизны траектории в т.М.
Модуль ускорения материальной точки
![]() (3.11)
(3.11)
угол между ускорением и скоростью (см. рис.3.1)
![]() (3.12)
(3.12)
Угол между скоростью и ускорением материальной точки может изменяться от нуля до 180(0 180).
Ускорения в различных системах отсчета связаны соотношением:

![]() (3.13)
(3.13)
где aтк
— ускорение материальной точки
относительно системы отсчета К (рис.3.3),
![]() — ускорение материальной точки
относительно системы отсчета
— ускорение материальной точки
относительно системы отсчета![]() ,
,![]() — ускорение системы отсчета
— ускорение системы отсчета![]() относительно системы отсчета К.
относительно системы отсчета К.
§4. Равнопеременное движение
Равнопеременное движение — движение, при котором за любые равные промежутки времени (ti = const) приращения скорости материальной точки одинаковы (vi = const).
При равнопеременном движении:
ускорение
a = <a> = const, (4.1)
зависимость скорости от времени
v = vн + at, (4.2)
зависимость радиус-вектора от времени
![]() (4.3)
(4.3)
Равнопеременное прямолинейное движение равнопеременное движение, при котором приращения скорости коллинеарны скорости материальной точки.
При равнопеременном прямолинейном движении ускорение является тангенциальным, а нормальное ускорение равно нулю:
a = a, an = 0. (4.4)
Согласно равенствам (4.1), (4.2) и (4.3) проекции ускорения (при движении материальной точки в одной плоскости) на оси Ох и Оу
![]() (4.5)
(4.5)
зависимости проекций скорости от времени
![]() (4.6)
(4.6)
зависимости координат от времени
 (4.7)
(4.7)
т раектория
м.т.
прямая линия, при этом направления
ускорения и скорости м.т. либо совпадают,
либо прямо противоположны.
раектория
м.т.
прямая линия, при этом направления
ускорения и скорости м.т. либо совпадают,
либо прямо противоположны.
Графики зависимостей ax(t), vx(t), x(t) представлены на рис.4.1 а, б, в.
1) если ax(t) = 0, то vx(t) = const, x(t) является линейной функцией (участки АВ на графиках этих зависимостей на рис.4.7, а, б, в);
2) если ax(t) = const, то vx(t) — линейная функция, x(t) — квадратичная функция (на участках BD и DF графики x(t) — параболы);
3) если в каких-либо точках vx(t) = 0, то на графике x(t) в этих точках будет либо максимум, либо минимум функции — т.С и т.Е на рис. 4.7, б, в;
4) если на графике vx(t) нет разрывов (т.В, т.D), то в соответствующих точках на графике x(t) наблюдается плавный переход одной кривой в другую (касательные к этим кривым в точке перехода совпадают).
Равноускоренное прямолинейное движение — равнопеременное прямолинейное движение, при котором модуль скорости увеличивается (v 0).
Н аправления
скорости и ускорения м.т. в начальный и
последующие моменты времени совпадают
(рис.4.1).
аправления
скорости и ускорения м.т. в начальный и
последующие моменты времени совпадают
(рис.4.1).
При равноускоренном прямолинейном движении:
модуль скорости
v = vн + at, (4.8)
путь
![]() (4.9)
(4.9)
Г рафик
зависимости модуля скорости от времени
(при tн
= 0)
рафик
зависимости модуля скорости от времени
(при tн
= 0)
v = vн + at, (4.10)
представлен на рис.4.2.
П уть
S за времяtв системе координат vОt при равноускоренном
движении равен площади (выраженной в
единицах пути) трапеции, ограниченной
графиком зависимости v(t), осью времени
от начального до конечного моментов
времени и отрезками прямых t = tни t = tк.
уть
S за времяtв системе координат vОt при равноускоренном
движении равен площади (выраженной в
единицах пути) трапеции, ограниченной
графиком зависимости v(t), осью времени
от начального до конечного моментов
времени и отрезками прямых t = tни t = tк.
График квадратичной зависимости пути от времени (Sн= 0 и tн= 0)
![]() (4.11)
(4.11)
представлен на рис.4.3 (на координатной плоскости SOt пунктиром показано положение вершины параболы, частью которой является график зависимости пути от времени).
При равноускоренном прямолинейном движении:
модуль конечной скорости
![]() (4.12)
(4.12)
среднее значение модуля скорости
![]() (4.13)
(4.13)
Равнозамедленное прямолинейное движение — прямолинейное равнопеременное движение, при котором модуль скорости уменьшается (v 0).
Н аправления
скорости и ускорения м.т. в начальный и
последующие моменты времени противоположны
(рис.4.4), а само движение существует в
промежутке времени:
аправления
скорости и ускорения м.т. в начальный и
последующие моменты времени противоположны
(рис.4.4), а само движение существует в
промежутке времени:![]() .
.
При равнозамедленном прямолинейном движении:
модуль скорости
v = vн – at, (4.14)
путь
![]() (4.15)
(4.15)
Графики зависимости модуля скорости от времени (при tн = 0)
v(t) = vн – at (4.16)
и квадратичной зависимости пути от времени (при Sн = 0)
![]() (4.17)
(4.17)
представлены на рис.4.5 и рис.4.6 соответственно.
Путь S за промежуток времени t в системе координат vОt равен площади (выраженной в единицах пути) трапеции (рис.4.5), образованной графиком v(t), осью времени от начального до конечного моментов времени и отрезками прямых t = tн и t = tк.
При равнозамедленном прямолинейном движении:
модуль конечной скорости

![]() (при
(при![]() ), (4.18)
), (4.18)
среднее значение модуля скорости находится по формуле (4.13).