

Система координат
Прямолинейная координатная ось Ox (Oy,Oz) — прямая линия с выбранными положительным направлением (отмечается стрелкой), началом отсчета и единичным отрезком (масштабом).
Н ачало
отсчёта —
любая точка (обозначается буквой О),
принадлежащая оси. Точка О делит ось на
положительную (вдоль положительного
направления) и отрицательную полуоси
(рис.П3.1).
ачало
отсчёта —
любая точка (обозначается буквой О),
принадлежащая оси. Точка О делит ось на
положительную (вдоль положительного
направления) и отрицательную полуоси
(рис.П3.1).
Единичный (масштабный) отрезок служит для измерения длин отрезков оси (расстояний между точками на оси) в единицах некоторой величины (например, длины).
Координата точки, принадлежащей оси Ox (обозначается x) — величина, равная:
а) длине L отрезка между началом отсчета и данной точкой:
x = L, (П3.1)
если точка находится на положительной полуоси (т.М на рис.П3.1а);
б) длине L отрезка между началом отсчета и данной точкой, умноженной на минус единицу:
x = L, (П3.2)
если точка находится на отрицательной полуоси (т.М на рис.П3.1б).
Прямоугольная (декартова) система координат на плоскости — система, состоящая из двух взаимно перпендикулярных прямолинейных координатных осей. Точка пересечения осей называется началом координат и обозначается буквой О.
На рис.П3.2 представлена система прямоугольных координат xOy. Ось Ox называется также осью абсцисс, ось Oy — осью ординат.
Проекция точки на ось — точка пересечения перпендикуляра, проведенного из данной точки к оси, с этой осью.
К оординатойх (или y)
точки, принадлежащей плоскости xOy
(рис.П3.2) является координата х (или y)
проекции данной точки на ось Ox
(или Oy).
оординатойх (или y)
точки, принадлежащей плоскости xOy
(рис.П3.2) является координата х (или y)
проекции данной точки на ось Ox
(или Oy).
Расстояние d между двумя точками N1(x1,y1) и N2(x2,y2), расположенными на плоскости xOy:
![]() , (П3.3)
, (П3.3)
где x1 и y1 — координаты точки N1, x2 и y2 — координаты точки N2 (рис.П3.2).
П рямоугольная
(декартова) система координат в
пространстве
— система, состоящая из трех взаимно
перпендикулярных координатных осей,
пересекающихся в одной точке, которая
является началом координат.
рямоугольная
(декартова) система координат в
пространстве
— система, состоящая из трех взаимно
перпендикулярных координатных осей,
пересекающихся в одной точке, которая
является началом координат.
На рис.П3.3 представлена правая система координат в пространстве, в которой кратчайший поворот положительной полуоси Ox к положительной полуоси Oy виден со стороны положительной полуоси Oz происходящим против хода часовой стрелки. Ось Oz называется также осью аппликат.
Приложение 4
Скаляры. Функции и графики.
Скаляр — величина, определяемая одним числом.
Скаляр не зависит от направления в пространстве.
Две однородные скалярные физической величины равны, если при измерении их одной и той же единицей получаются одинаковые числа.
Приращение (изменение) некоторой величины A — разность между конечным (Aк) и начальным (Aн) значениями этой величины:
![]() . (П4.1)
. (П4.1)
Убыль (разность) некоторой величины A — разность между начальным (Aн) и конечным (Aк) значениями этой величины:
![]() . (П4.2)
. (П4.2)
Между убылью и приращением величины A выполняется соотношение:
![]() . (П4.3)
. (П4.3)
Убыль ´A часто обозначают A.
Функция y = f(x) или y = y(x) — правило, по которому каждому числу x сопоставляется число y.
Числа x называются значением аргумента функции, числа y — значением функции (в точке x).
Область определения функции D — множество X чисел x.
Область значений функции R — множество Y чисел y.
График функции y(x) — множество точек на координатной плоскости xOy (Приложение 1) с координатами (x,y).
Графиком функции может быть некоторая линия.
Линейная функция функция первой степени от аргумента:
y = ax + b, (П2.4)
где а (а 0) и b некоторые константы.
Графиком линейной функции является прямая линия, тангенс угла наклона которой к оси Оx равен постоянной при аргументе функции:
tg = a. (П4.5)
Н а
рис.П2.1 приведены графики этой функции
при различных постоянных а и b.
а
рис.П2.1 приведены графики этой функции
при различных постоянных а и b.
Квадратичная функция функция второй степени от аргумента:
![]() , (П2.4)
, (П2.4)
где а (а 0), b и с некоторые константы.
Г рафикомквадратичной
функции является парабола. График этой
функции при а
0 приведен на рис.П2.2а, при а
0
на рис.П2.2б.
рафикомквадратичной
функции является парабола. График этой
функции при а
0 приведен на рис.П2.2а, при а
0
на рис.П2.2б.
ПРИЛОЖЕНИЕ 5
Векторы.
Вектор — величина, определяемая направлением в пространстве и модулем (абсолютной величиной).
В ектор
изображается направленным отрезком
прямой (рис.П5.1) и может обозначаться
двумя буквами со стрелкой наверху,
например
ектор
изображается направленным отрезком
прямой (рис.П5.1) и может обозначаться
двумя буквами со стрелкой наверху,
например
![]() (т.A
— начало вектора, т.В — конец вектора),
или буквой со стрелкой наверху, например
(т.A
— начало вектора, т.В — конец вектора),
или буквой со стрелкой наверху, например
![]() ,либо одной
буквой, напечатанной полужирным шрифтом,
например a.
,либо одной
буквой, напечатанной полужирным шрифтом,
например a.
Модуль (абсолютная величина) вектора — длина вектора в выбранном масштабе. Обозначается: a или а.
Векторы подразделяются на свободные (начало вектора может находиться в любой точке пространства), скользящие (начало вектора может находиться в любой точке прямой, проходящей через начало и конец данного вектора) и связанные (начало вектора находится в определённой точке пространства).
Равенство свободных векторов
Два свободных вектора равны между собой, если их направления одинаковы и модули равны. На рис.П5.1 показаны два равных вектора а и b.
Коллинеарные векторы — векторы, лежащие на параллельных прямых.
Сложение векторов
Для сложения двух векторов a и b необходимо осуществить параллельный перенос вектора а (либо b) таким образом, чтобы конец одного вектора совпал с началом другого (рис.П5.2).
Сумма двух векторов a и b — вектор
![]() , (П5.1)
, (П5.1)
начало которого совпадает с началом вектора a, конец — с концом
вектора b при условии, что начало вектора b совпадает с концом вектора a (правило треугольника — рис.П5.2).
Д ля
вычисления модулей векторов и углов
между ними в треугольнике может быть
использованы теоремыкосинусов
и синусов.
ля
вычисления модулей векторов и углов
между ними в треугольнике может быть
использованы теоремыкосинусов
и синусов.
Например, стороны треугольника, показанного на рис.П5.2 связаны между собой следующими соотношениями:
по теореме косинусов
![]() , (П5.2)
, (П5.2)
по теореме синусов
![]() . (П5.3)
. (П5.3)
Сумма нескольких векторов
Для нахождения суммы n векторов можно параллельным переносом по очереди совместить начало последующего вектора с концом предыдущего вектора.
Суммой векторов ai (i = 1,2,...,n) является вектор

![]() , (П5.4)
, (П5.4)
начало которого совпадает с началом первого вектора, а конец — с концом последнего вектора.
На рис.П5.3 в качестве примера показаны четыре вектора, сумма которых равна вектору а.
Сложение векторов коммутативно:
![]() , (П5.5)
, (П5.5)
и ассоциативно:
![]() . (П5.6)
. (П5.6)
Умножение и деление вектора на скаляр
Произведением вектора a на скаляр n (действительное число) является вектор
b = na, (П5.7)
направление которого при положительном n (n>0) совпадает с направлением вектора а (рис.П5.4а,б), при отрицательном n (n<0) — противоположно вектору а (рис.П5.4,в,г), модуль которого
![]() . (П5.8)
. (П5.8)
Из этого правила следует, что векторы а и а направлены в противоположные стороны, а их модули равны (рис.П5.4,г).
При n = 0 получается нулевой вектор.
Нулевой вектор 0 — вектор, начало и конец которого совпадают.
М одуль
нулевого вектора равен нулю.
одуль
нулевого вектора равен нулю.
Деление вектора а на скаляр n можно представить как его умножение на скаляр, равный 1/n.
Вычитание векторов
Разностью векторов a и b является вектор
![]() , (П5.9)
, (П5.9)
начало которого совпадает с концом вектора b, а конец — с концом вектора a, при условии, что начало вектора a совпадает с началом вектора b (рис.П5.5а).
Разность векторов а и b можно представить как сумму векторов а и b (рис.П5.5б):
![]() . (П5.10)
. (П5.10)
С
 умма
и разность векторовa
и b могут
быть найдены также по правилу
параллелограмма (рис.П5.6).
умма
и разность векторовa
и b могут
быть найдены также по правилу
параллелограмма (рис.П5.6).
Проекция вектора на ось
Проекция вектора а на ось Оx (обозначается aх) — величина, определяемая равенством:
![]() , (П5.11)
, (П5.11)
где а — модуль вектора а, — угол между вектором а и осью Oх (рис.П5.7,а и П5.7,б).
Проекция вектора а на ось Oх может быть определена также из из равенства:
![]() , (П5.12)
, (П5.12)
где хк и хн — координаты конца и начала вектора а по оси Ох (рис.П5.7а и П5.7б).
Проекция вектора а на ось Ох может быть определена через длину L отрезка AB между проекциями конца (т.B) и начала (т.А) вектора a на ось Оx:
если угол между вектором а и положительной полуосью Oх острый (0 < /2 — рис.П5.7,а), то:
 ах
= L, (П5.13)
ах
= L, (П5.13)
если угол между вектором а и положительной полуосью Ox тупой (/2< — рис.П5.7,б), то:
ах = L. (П5.14)
Если угол между вектором a и осью Ox прямой ( = /2), то:
ах = 0. (П5.15)
Если вектор равен сумме векторов (равенство П5.4), его проекция на какую-либо ось (например, ось Оx) равна сумме проекций этих векторов на данную ось аix:
![]() . (П5.16)
. (П5.16)
Радиус-вектор точки r — вектор, начало которого совпадает с началом координат, конец — с данной точкой (рис.П5.8).
П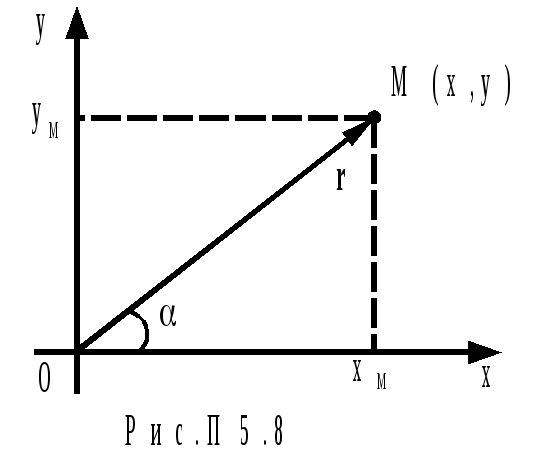 роекции
радиус-вектора некоторой точки на оси
декартовых координат равны координатам
этой точки:
роекции
радиус-вектора некоторой точки на оси
декартовых координат равны координатам
этой точки:
 (П5.17)
(П5.17)
Единичный вектор аед — вектор, модуль которого равен единице:
aед = 1. (П5.18)
Единичный вектор может быть записан в виде выражения:
![]() . (П5.19)
. (П5.19)
Орты — единичные векторы, направления которых совпадают с положительным направлением координатных осей.
О бозначение
ортов по координатным осям:
i — по оси
Ox,
j
— по оси Oy
(рис.П5.9).
бозначение
ортов по координатным осям:
i — по оси
Ox,
j
— по оси Oy
(рис.П5.9).
Разложение вектора на составляющие — замена вектора несколькими векторами, сумма которых равна этому вектору.
Например, вектор а может быть разложен на две составляющие, параллельные координатным осям:
![]() , (П5.20)
, (П5.20)
где ax и ay — составляющие вектора a, параллельные осям Ox и Oy соответственно (см. рис.П5.9)
Любой вектор может быть представлен в виде суммы векторов, выраженных через орты:
a = axi + ayj, (П5.21)
где ax и ay — проекции вектора a на оси Ox и Oy, соответственно.
Вектор а (на плоскости) может быть задан двумя числами — либо модулем а и углом к какой-либо оси (например, оси Ox), либо проекциями на оси аx и аy.
Они связаны между собой равенствами:
 (П5.22)
(П5.22)