

Для решения некоторых задач можно считать, что
pс = const, (13.24)
если приращением импульса системы, по сравнению с начальным значением, можно пренебречь:
pс pнс, (13.25)
вследствие малых значений равнодействующей внешних сил и/или промежутка времени действия внешних тел, приводящих к малой величине импульса равнодействующей внешних сил.
§14. Работа и мощность
Работа постоянной силы при прямолинейном движении А — СФВ, равная скалярному произведению постоянной силы F на перемещение м.т. r, на котором действует эта сила:
A = (F,r) = F|r|cos, (14.1)
где сила F = const на r, — угол между перемещением r и силой F (рис.14.1).
Единица работы — джоуль: [A] = Дж = кгм2/с2.
Р абота
силы может быть положительной, равной
нулю и отрицательной:
абота
силы может быть положительной, равной
нулю и отрицательной:
а) А > 0 при 0 < /2;
б) А = 0 при = /2;
в) А < 0 при /2 < .
Работа постоянной силы может быть выражена также через произведение:
а) проекции силы на ось Ol, совпадающей по направлению с перемещением l, и модуля этого перемещения:
A = Fll, (14.2)
б) проекции перемещения на ось OF, совпадающей по направлению с силой F, и модуля этой силы:
A = lFF, (14.3)
в) проекций силы и перемещения на координатные оси (при движении м.т. в плоскости хОу):
A = Fхх + Fyy. (14.4)
В частности, при прямолинейном движении материальной точки вдоль оси Ох работа постоянной силы
A = Fxx. (14.5)
Работа постоянной силы при прямолинейном движении вдоль оси Ох в системе координат FxOx равна площади (в единицах работы) прямоугольника, ограниченного графиком Fcx(х), осью Ох от начальной до конечной координаты м.т. и отрезками прямых х = хн и х = хк (рис.14.2).
Р абота
переменной силы при произвольном
движении
материальной
точки — СФВ,
равная пределу суммы скалярных
произведений силы Fi
(рис.14.3) на перемещение м.т. ri,
на котором действует эта сила, при
бесконечном уменьшении перемещений
ri:
абота
переменной силы при произвольном
движении
материальной
точки — СФВ,
равная пределу суммы скалярных
произведений силы Fi
(рис.14.3) на перемещение м.т. ri,
на котором действует эта сила, при
бесконечном уменьшении перемещений
ri:

![]() (14.6)
(14.6)
Работа переменной силы при прямолинейном движении м.т. вдоль оси Ох
![]() (14.7)
(14.7)
Р абота
такой силы в системе координатFxOx
равна площади (в единицах работы)
криволинейной трапеции (рис.14.4),
ограниченной графиком Fx(х),
осью Ох и отрезками прямых х = хн
и х =
хк.
абота
такой силы в системе координатFxOx
равна площади (в единицах работы)
криволинейной трапеции (рис.14.4),
ограниченной графиком Fx(х),
осью Ох и отрезками прямых х = хн
и х =
хк.
Средняя мощность <Р> — СФВ, равная отношению работы к промежутку времени t, за который совершена эта работа:
![]() (14.8)
(14.8)
Мощность (мгновенная) Р — СФВ, равная пределу отношения элементарной работы A к промежутку времени t, за который совершена эта работа, при бесконечном уменьшении промежутка времени:
![]() (14.9)
(14.9)
Единица мощности — ватт: [Р] = Вт = кгм2/с3.
Мощность P может быть выражена через скорость v и силу F, приложенную к материальной точке. Она равна их скалярному произведению:
P = (F,v) = Fvcos , (14.10)
где — угол между силой F и скоростью v материальной точки.
Мощность также может быть выражена через Fv — проекцию силы на ось Ov, совпадающую по направлению со скоростью v, или через vF — проекцию скорости на ось OF, совпадающую по направлению с силой F:
P = Fvv = FvF , (14.11)
либо через проекции силы и скорости на координатные оси (при движении м.т. в плоскости хОу):
P = Fхvх + Fуvу. (14.12)
Работа упругой силы может быть определена из следующих равенств:
![]() (14.13)
(14.13)
![]() (14.14)
(14.14)
![]() (14.15)
(14.15)
где хн и xк — начальное и конечное смещения незакрепленного конца пружины, к которому приложена внешняя сила Fвнеш (рис.14.5а), к — жесткость пружины.
Работа упругой силы может быть положительной, отрицательной и равной нулю:
а )
Aупр
> 0 — при уменьшении удлинения
(укорочения) пружины;
)
Aупр
> 0 — при уменьшении удлинения
(укорочения) пружины;
б) Aупр < 0 — при увеличении длины пружины при растяжении или уменьшении длины при сжатии пружины;
в) Aупр = 0 — при угле между силой упругости и скоростью м.т., равном 90 (например, при движении м.т. по дуге АВ окружности, представленной на рис.14.5, б), или при замкнутой траектории.
Р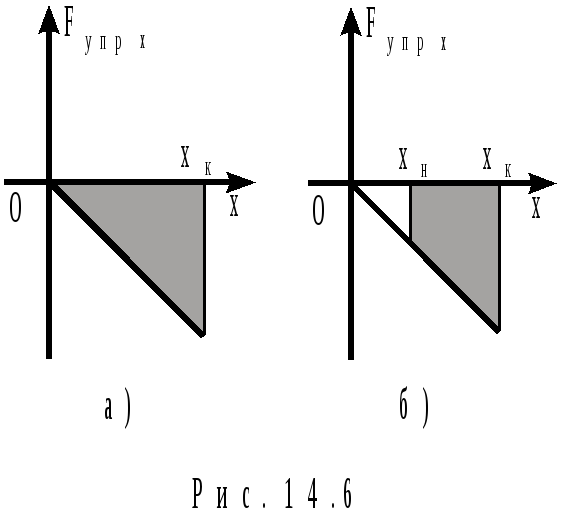 абота
упругой силы в системе координатFупр.хOx
равна площади (в единицах работы)
прямоугольного
треугольника
при растяжении или сжатии пружины (на
рис.14.6,а – при растяжении) из ненагруженного
(хн
= 0) состояния или площади трапеции
при растяжении или сжатии пружины из
нагруженного (хн
0) состояния (на рис.14.6,б – при растяжении),
ограниченных соответствующим графиком
Fупр.x(х),
осью Ох от начальной до конечной
координаты незакрепленного конца
пружины и отрезками прямых х = хн
(в первом случае хн
= 0) и х = хк.
абота
упругой силы в системе координатFупр.хOx
равна площади (в единицах работы)
прямоугольного
треугольника
при растяжении или сжатии пружины (на
рис.14.6,а – при растяжении) из ненагруженного
(хн
= 0) состояния или площади трапеции
при растяжении или сжатии пружины из
нагруженного (хн
0) состояния (на рис.14.6,б – при растяжении),
ограниченных соответствующим графиком
Fупр.x(х),
осью Ох от начальной до конечной
координаты незакрепленного конца
пружины и отрезками прямых х = хн
(в первом случае хн
= 0) и х = хк.
Работа упругой силы определяется только начальным и конечным положениями м.т. и не зависит от траектории между этими точками.