

Физика коллоквиум
.pdfВопросы к коллоквиуму 1
1. Система отсчета. Кинематика материальной точки. Траектория и путь. Перемещение, скорость и ускорение материальной точки.
Тело, относительно которого рассматривается движение других тел, называют телом отсчёта. Для определения положения тела в пространстве относительно тела отсчета необходима система координат, жестко связанная с ним.
Положение тела в пространстве при механическом движении изменяется с течением времени, поэтому необходимо выбрать способ измерения времени (часы). Таким образом, тело отсчета, жестко связанная с ним система координат и часы образуют систему отсчета.
Тело, размерами и формой которого можно пренебречь, в сравнении с масштабами движений, считают материальной точкой. Основная задача кинематики – написать уравнение движения материальной точки: Поскольку всякое движение происходит в пространстве и времени, то положение материальной точки в любой момент времени относительно тела отсчёта известно, если заданы её координаты х = х(t), y = y(t), z = z(t) или радиус-вектор( вектор, соединяющий начало координат и положение точки в данный момент времени(t)) r=r(t)( над r и r(t) знаки вектора). При своём движении в пространстве материальная точка описывает воображаемую линию, которую называют траекторией. Например, следы людей и машин на песке, инверсионный след самолёта, летящего высоко в небе. Путь-это длина отрезка траектории. Длина пути – скалярная величина, равна длине участка траектории, пройденного м. т. за рассматриваемый промежуток времени. Вектор, проведённый из начального положения материальной точки в конечное, называют вектором перемещения. (знаки векторов везде, кроме t)
Скоростьэто характеристика быстроты изменения перемещения. Вектором средней скорости называют физическую величину, равную отношению вектора перемещения (приращению радиусвектора) к промежутку времени, за которое это перемещение произошло. . Вектор скорости направлен в ту же сторону, что и вектор перемещения. Часто при решении задач для нахождения средней скорости используют формулу: . Эта формула справедлива в случае прямолинейного равноускоренного или равнозамедленного движений и в одну сторону, т. е. без изменения направления скорости. Однако аналогичная формула в векторном виде остается справедливой и в случае равнопеременного движения с изменением направления скорости. Вектор среднего ускорения равен отношению вектора изменения скорости к промежутку времени, за которое это изменение произошло. .
2. Криволинейное движение. Скорость и ускорение (нормальное, тангенциальное) при криволинейном движении.
Движение называют криволинейным, если скорость м. т. изменяется и по величине, и по
направлению. В пределе вектор an ( vn ┴ V 1 или a n ┴ V 1(вектора) ) направлен по радиусу к центру круга кривизны и называется центростремительным (нормальным) ускорением.
Вектор центростремительного ускорения направлен по радиусу к центру круга кривизны и характеризует изменение скорости по направлению. аn = v2 /R.
( )
Вектор касательного (тангенциального) ускорения характеризует изменение скорости по величине, направлен по касательной к траектории в данной точке.
,
Вектор полного ускорения характеризует изменение скорости по величине и направлению, направлен внутрь кривизны траектории.
Модуль полного ускорения
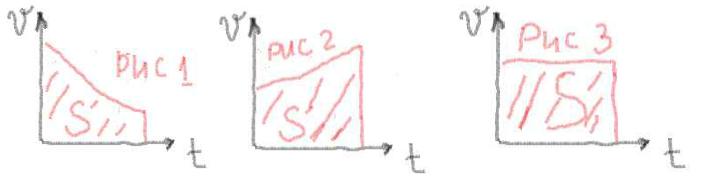
3.Прямолинейное (равномерное и равноускоренное) движение. Графики зависимости координаты и скорости от времени.
Прямолинейное равномерное движение-движение, при котором м.т. движется с постоянной по величине и направлению скоростью. , v=const.
Равноускоренное движениепроисходит с постоянным вектором полного ускорения, a=const. a<0 – равнозамедленное(рис1), а>0 – равноускоренное(рис2), а=0 – равномерное(рис.3)
4. Движение материальной точки по окружности. Угловая скорость и угловое ускорение. Равномерное и равноускоренное вращательные движения. Связь между линейными и угловыми величинами.
Положение материальной точки при движении, по окружности, можно задать не только радиус-вектором, но и угловым перемещением (углом поворота) радиус-вектора, характеризующего положение м. т. относительно неподвижной плоскости Q, принятой за тело отсчета и подвижной плоскости Р, жестко связанной с вращающим телом. Уравнение кинематики вращательного движения: . Известно из математики, что . За малый промежуток времени t тело повернется на угол , а точка пройдет путь по траектории (1) .Величина радиуса R и положение центра окружности определяются соотношением . Разделим (1) на :
. Из кинематики поступательного движения известно, что .
Тогда (угловая скорость). Средняя угловая скорость равна отношению изменения углового перемещения к промежутку времени, за которое перемещение произошло.
При вращении м. т. (тела) в пределе при получаем мгновенную угловую скорость .
Мгновенная угловая скорость тела равна первой производной углового перемещения по времени. Если тело вращается равномерно, то = сonst. Тогда . Угловая скорость в СИ измеряется в радианах в секунду (рад/c). Из равенства , перейдем к пределу при
, при R=const. Переходим к производным: , но ;
. Следовательно, . Угловое ускорениебыстрота изменения угловой скорости со временем. , - ускоренное, - замедленное. Равномерное вращательное движение , если то
Равноускоренное вращательное движение
(зависимость угловых и линейных |
ускорений) |
5. Первый закон Ньютона. Инерциальные системы отсчета. Принцип относительности Галилея, преобразования Галилея. Закон сложения скоростей. ( преобразования Галилея)
Любое тело (м. т.) находится в состоянии покоя или равномерного и прямолинейного движения, если на него не действуют другие тела. Такие тела называют свободными, а его движение – свободным движением или движением по инерции. Первый закон Ньютона связан с понятием инерциальной системы отсчета. Существуют инерциальные системы отсчёта, в которых все свободные тела движутся равномерно и прямолинейно или покоятся.
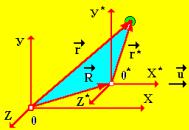
Закон сложения скоростей:
Дифференцируя правую и левую части выражения по времени t, получим
(1)
Где – скорость м. т. М в системе S (абсолютная скорость), – cкорость м. т. М в системе S* (относительная скорость), u – переносная скорость. Формула (1) выражает классический закон сложения скоростей. Абсолютная скорость м. т. М равна векторной сумме относительной и переносной скоростей. Дифференцируя правую и левую части выражения
(1) по времени t, получим а = а*, т. е. абсолютное ускорение равно относительному. Равенство показывает, что система S* также является инерциальной, как и система S, причём .
Система отсчёта, движущаяся прямолинейно и равномерно относительно инерциальной системы отсчёта, является инерциальной. В инерциальных системах отсчёта одновременно выполняются 1-й, 2-й и 3-й законы Ньютона .
Никакими механическими опытами, производимыми внутри инерциальной системы отсчёта, нельзя установить, находится она в покое или движется равномерно и прямолинейно
(Принцип относительности Галилея).
Позднее Эйнштейн обобщил принцип относительности Галилея: Вообще никакими физическими опытами (механическими, тепловыми, электрическими, магнитными, оптическими и т. д.), производимыми в инерциальной системе отсчёта, нельзя установить факта её покоя или равномерного и прямолинейного движения.
6. Взаимодействие тел, сила, масса. Второй закон Ньютона. Виды силовых взаимодействий. Силы упругости, трения, тяготения.
Взаимодействие между телами осуществляется полями. Тело массы М возбуждает в окружающем пространстве гравитационное поле, которое проявляется в виде действия на тело массы m силы (частный случай – молекулярные силы; наблюдается слипание образцов).
Cила – мера интенсивности взаимодействия тел, в результате которого они получают ускорения или деформируются. В СИ- Н Масса – универсальная мера материи, мера инертности тела, мера гравитации. Измеряется в СИ – КГ.
2 закон Ньютона: вектор ускорения прямо пропорционален геометрической сумме векторов всех сил, действующих на м. т. и обратно пропорционален массе этого тела.
Силы, действующие между материальными точками (телами) данной системы, называют внутренними силами (f).
Силы, действующие на тела системы со стороны других тел, не входящих в данную систему, называют внешними силами (F).
Замкнутой системой называют систему, на которую действие внешних сил компенсировано Сила упругостиэто сила возникающая при упругой деформации тел..
mg
Сила притяжения двух м. т. прямо пропорциональна произведению масс взаимодействующих м. т. и обратно пропорциональна квадрату расстояния между ними:
Второй закон Ньютона является законом поступательного движения в инерциальных системах отсчета, т. е.
7. Третий закон Ньютона. Импульс. Изолированная система. Закон сохранения импульса.
Систему тел называет изолированной, если на тела системы не действуют силы.
Закон сохранения импульса: в замкнутой системе тел векторая сумма импульсов тел входящих в систему, есть величина постоянная.
Импульсом тела называют произведением его массы на скорость.
3 закон Ньютона: силы, с которыми взаимодействуют тела, равны по величине и противоположны по направлению. Линия действия сил лежит на одной прямой, соединяющей центры масс этих тел.
В замкнутой системе тел векторная сумма импульсов этих тел, входящих в систему, есть величина постоянная.
Измеряется в СИ – кг м/с
8. Неинерциальные системы отсчета. Силы инерции в поступательных и во вращательных неинерциальных системах отсчета.
Неинерциальными системами отсчета называют системы отсчета, которые движутся относительно инерциальных систем отсчета, с ускорением.
1.Силы инерции действуют только в неинерциальных системах отсчета.
2.Силы инерции вызваны не взаимодействием тел, а ускоренным движением системы отсчета.
3.К силам инерции не применим третий закон Ньютона, так как нет взаимодействующих тел.
4.Если некоторая система тел (м. т.) находится в неинерциальной системе отсчета, то силы инерции являются внешними силами, следовательно, системы не являются замкнутыми и поэтому не выполняются законы сохранения.
5.В неинерциальных системах отсчета силы инерции действуют точно также, как и силы взаимодействия тел, например, космонавт, весьма реально ощущает силу инерции, прижимающую его к креслу корабля, после старта ракеты на активном участке полета.
6.Силы инерции прямо пропорциональны массе тел. Поэтому в поле сил инерции все тела движутся с одинаковыми ускорениями.
9.Центр масс. Теорема о движении центра масс.
Центр масс – это геометрическая точка, характеризующая распределение масс в теле.
Центр масс механической системы движется как материальная точка с массой, равной массе всей системы, к которой приложено.
10. Движение тела переменной массы. Уравнение Мещерского.
Пусть в t=0 ракета начинает движение в СИ связанной с Землей =0
Через dt :
U – относительная скорость отделяющейся массы.
Масса ракеты : m≠dm
Скорость ракеты : d
Масса отделившейся части : dm Скорость отделившейся части :
Изменение импульса системы :
Уравнение Мещерского:
11. Движение в центральном поле сил. Законы Кеплера и закон всемирного тяготения.( дописать движение в центральном поле сил)
12. Консервативные и неконсервативные силы. Работа консервативных сил. Потенциальная энергия.
( работа консервативных сил)
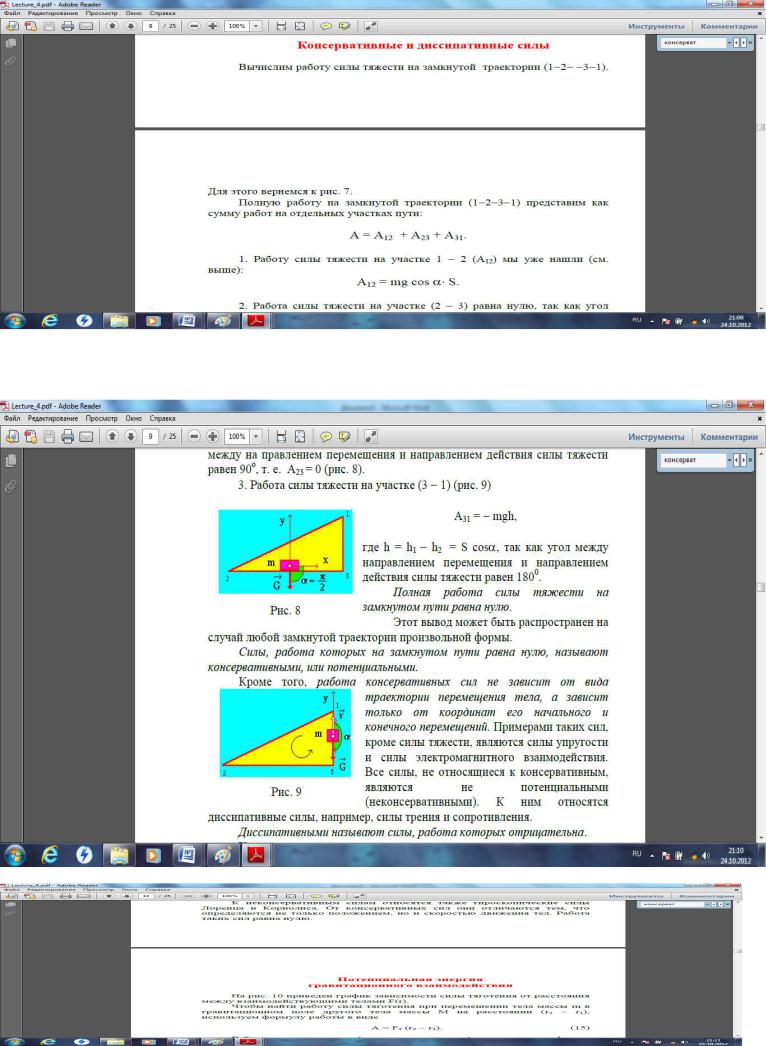
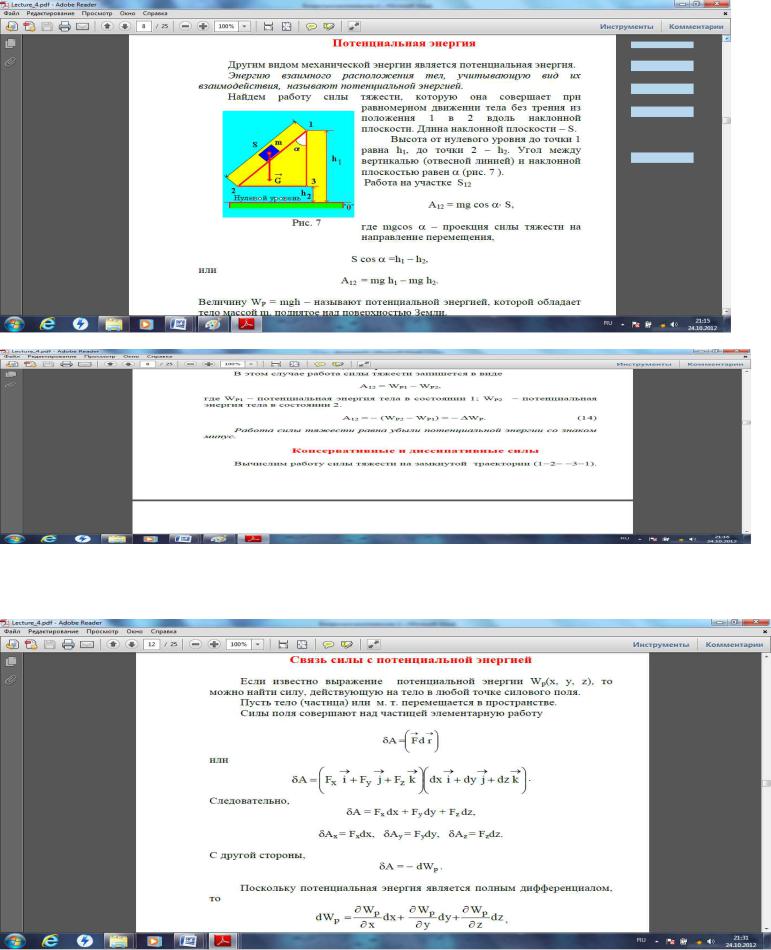
13.Связь между силой и потенциальной энергией. Потенциальные энергии силы тяжести, силы упругости
исилы гравитационного взаимодействия. ( силу тяжести)