

ТИПИС
.pdfСамостоятельные работы |
91 |
|
Результат
Должна быть создана программа, реализующая процедуру планирования в эвристическом методе поиска на основе оценочной функции. Представлен график, анализирующий достоинства и недостатки процедур планирования на основе эвристической силы выбранной функции.
Указания и порядок выполнения
Результаты выполнения каждого пункта необходимо согласовывать с преподавателем до окончательного оформления работы.
1.Описание задачи. В данном пункте следует кратко описать смысл задачи на естественном языке. Выбор задачи осуществляется самостоятельно из предложенного преподавателем списка задач (см. прил. А, Б).
В результате описание задачи должно быть достаточным для дальнейшей формализации.
2.Представление пространства поиска. В данном пункте необходимо охарактеризовать пространство состояния и поиска.
Результатом является модель пространства поиска.
3.Условия задачи:
а) описание начального условия решения задачи. В данном пункте следует охарактеризовать процедуру планирования и условия проведения поиска (проанализировать свойства пространства состояний и поиска);
б) описание требуемого результата решения задачи. При заполнении данного пункта необходимо определить, какие результаты возможно получить, используя эвристические методы поиска на основе оценочной функции, применяемой в алгоритме А*, в алгоритме с процедурой возврата и расширенной оценочной функцией;
в) формирование оценочной функции. В данном пункте следует обосновать выбор и состав оценочной функции, а также процедуру изменения оценочной функции, условия возврата в зависимости от свойств текущих состояний.
Результатом является оценочная функция, а также процедура ее изменения и условия возврата.
4.Создание программы, реализующей эвристические методы поиска на основе оценочной функции. Данный пункт выполняется самостоятельно.
5.Анализ полученных данных и вывод. Полученные в результате работы программы эмпирические данные должны подтвердить или опровергнуть правильность теоретических выводов при планировании оценочной функции и способа ее работы.

92 |
Самостоятельные работы |
|
|
||
|
|
|
Результатом являются графики, схемы, характеризующие роль процедуры планирования оценочной функции в организации процедур генерации и проверки.
Самостоятельная работа 6*
АНАЛИЗ РАБОТЫ МЕТОДОВ ПОИСКА В N-НАПРАВЛЕННОМ РЕЖИМЕ
Тема
Анализ работы слепых методов поиска и метода Мура в n-на- правленном режиме.
Цель
Дать представление о возможности использования слепых методов поиска и метода Мура в n-направленном режиме в решении задач поиска.
Задача
Провести относительный анализ эффективности работы слепых методов поиска и метода Мура в n-направленном режиме.
Результат
Должна быть создана программа, реализующая слепые методы поиска и метод Мура в n-направленном режиме. Представлены графики, анализирующие достоинства и недостатки слепых методов поиска и метод Мура в n-направленном режиме.
Указания и порядок выполнения
Результаты выполнения каждого пункта необходимо согласовывать с преподавателем до окончательного оформления работы.
1. Описание задачи. В данном пункте следует кратко описать смысл задачи на естественном языке. Выбор задачи осуществляется самостоятельно из предложенного преподавателем списка задач.
В результате описание задачи должно быть достаточным для дальнейшей формализации.

Самостоятельные работы |
93 |
|
2.Представление пространства поиска. В данном пункте необходимо охарактеризовать пространство состояния и поиска.
Результатом является модель пространства поиска.
3.Условия задачи:
а) описание начального условия решения задачи. В данном пункте следует выделить задачи для слепых методов поиска и метода Мура в n-на- правленном режиме (проанализировать свойства пространства поиска);
б) описание требуемого результата решения задачи. При выполнении данного пункта необходимо определить, какие задачи можно решить, используя различные способы генерации в слепых методах поиска и методе Мура в n-направленном режиме.
4.Выбор метода поиска. В данном пункте следует на основе теоретических выводов п. 1–3 принять решение о выборе метода поиска, ориентированного нарешение той или иной задачи поискав n-направленномрежиме.
Результатомявляетсяобоснование, представленноевформальномвиде.
5.Создание программы, реализующей слепые методы поиска и метод Мура в n-направленном режиме. Данный пункт предполагает программную реализацию слепых методов поиска и метод Мура в n-на- правленном режиме (выполняется самостоятельно).
6.Анализ полученных данных и вывод. Полученные в результате работы программы данные должны подтвердить или опровергнуть правильность теоретических выводов о выборе метода поиска в n-направленном режиме.
Результатом являются графики, схемы, характеризующие работу слепых методов поиска и метода Мура в n-направленном режиме, позволяющие оценить их эффективность при решении задач поиска.
94 |
Библиографический список |
|
|
||
|
|
|
Библиографический список
1.Глушков, В. М. Основы безбумажной информатики / В. М. Глушков. – 2-е изд., испр. – М. : Наука. Гл. ред. физ.-мат. лит., 1987. – 552 с.
2.Нильсон, Н. Дж. Принципы искусственного интеллекта / Н. Дж. Нильсон ; пер. с англ. Р. М. Абдусаматова, Ю. Н. Крючкова ; под ред. В. Л. Стефанюк. – М. : Радио и связь, 1985. – 373 с. : ил.
3.Попов, Э. В. Экспертные системы: Решение неформализованных задач в диалоге с ЭВМ / Э. В. Попов. – М. : Наука, 1987. – 284 c.
4.Попов, Э. В. Искусственный интеллект : в 3-х кн. Кн. 1. Системы общения и экспертные системы : справочник / Э. В. Попов. – М. : Радио и связь, 1990. – 464 с.
5.Попов, Э. В. Искусственный интеллект : в 3-х кн. Кн. 2. Модели и методы: справочник / Э. В. Попов. – М. : Радио и связь, 1990. – 310 с.
6.Вермишев, Ю. Х. Методы автоматического поиска решений при проектировании сложных технических систем / Ю. Х. Вермишев. – М. : Радио и связь, 1982. – 152 с. : ил.
7.Ким, Д. П. Робототехника и гибкие автоматизированные производства. Кн. 6. Техническая имитация интеллекта : учеб. пособие для вузов / Д. П. Ким, В. М. Назаретов. – М. : Высш. шк., 1986. – 144 c. : ил.
8.Ким, Д. П. Методы поиска и преследование подвижных объектов / Д. П. Ким. – М. : Наука. Гл. ред. физ.-мат. лит., 1989. – 336 с.

Библиографический список |
95 |
|
9.Кумбс, М. Экспертные системы концепции и примеры / М. Кумбс, Дж. Элти. – М. : Финансы и статистика, 1987. – 264 с.
10.Никитина, М. И. Системы и технологии поддержки принятия решений : учеб. пособие / М. И. Никитина ; Краснояр. гос. техн. ун-т. – Красноярск : ИПЦ КГТУ, 2005. – 130 с.
11.Пупков, К. А. Интеллектуальные системы: (исследование и создание) / К. А. Пупков, В. Г. Коньков. – М. : Изд-во МГТУ им. Н. Э. Баума-
на, 2003. – 347 с.
12.Берж, К. Теория графов и ее применения / К. Берж ; пер. с фр. А. А. Зыкова ; под ред. И. А. Вайнштейна. – М. : Иностранная литература, 1962. – 320 с.
13.Оре, О. Графы и их применение / О. Оре ; пер. с англ. Л. И. Головиной ; под ред. И. М. Яглома. – М. : Мир, 1965. – 176 с.
14.Татт, У. Теория графов / У. Татт ; пер. с англ. Г. П. Гаврилова. –
М. : Мир, 1988 – 424 с.
15.Дулесов, В. А. Интеллектуальные информационные системы : учеб. пособие / В. А. Дулесов ; Краснояр. гос. техн. ун-т, Хакас. техн. ин-т. – Абакан : ХТИ КГТУ, 2006. – 99 с.
16.Баранчеев, В. П. Управление знаниями в инновационной сфере : учебник / В. П. Баранчеев. – М. : Благовест-В, 2007. – 271 с.
17.Тейлор, Дж. Почти интеллектуальные системы. Как получить конкурентные преимущества путем автоматизации принятия скрытых решений : пер. с англ. / Дж. Тейлор, Н. Рэйден. – СПб. : Символ, 2009. – 445 с.
18.Евменов, В. П. Интеллектуальные системы управления : учеб. пособие / В. П. Евменов. – М. : ЛИБРОКОМ, 2009. – 300 с.
19.Гаскаров, Д. В. Интеллектуальные информационные системы : учебник для вузов / Д. В. Гаскаров // М. : Высш. шк., 2003. – 431 с.
20.Девятков, В. В. Системы искусственного интеллекта / В. В. Девятков. – М. : МГТУ имени Н. Э. Баумана, 2001. – 453 с.
21.Джордж, Ф. Л. Искусственный интеллект. Стратегии и методы поиска решения сложных проблем / Ф. Л. Джордж. – М. ; СПб. ; К. : Вильямс, 2003. – 380 с.
22.Баин, А. М. Современные информационные технологии систем поддержки принятия решений : учеб. пособие / А. М. Баин. – М. : Высш. образование, 2009. – 240 с.
23.Лорьер, Ж.-Л. Системы искусственного интеллекта / Ж.-Л. Лорьер ; пер. с фр. под ред. В. Л. Стефанюка. – М. : Мир, 1991. – 568 с. : ил.

96 |
Библиографический список |
|
|
||
|
|
|
24.Zagorulko, Yu. A. Knowledge representation language based on the integration of production rules, frames and a subdefinite model / Yu. A. Zagorulko, I. G. Popov // Joint Bulletin of the Novosibirsk Computing Center and Institute of Informatics Systems. Series: Computer Science, 8 (1998), NCC Publisher. – Novosibirsk, 1998. – P. 8–100.
25.Загорулько, Ю. А. Общая концепция агентов в среде SemP / Ю. А. Загорулькл, И. Г. Попов, Ю. В.Костров, И. П. Сергеев // Труды ICIT. –
Новосибирск, 1999. – С. 231–246.
26.Brooks, R. A. Intelligence without reason / R. A. Brooks // Proceedings of the Twelfth International Joint Conference on Artificial Intelligence (IJCAI-91). – Sydney, Australia, 1991. – PP. 569–595.
27.Maes, P. Situated agents can have goals / P. Maes // Designing Autonomous Agents. – MIT Press, 1990. – PP. 115–120.
28.Цибульский, Г. М. Мультиагентный подход к анализу изображений: Монография / Г. М. Цибульский ; отв. ред. В. В. Москвичев. – Новосибирск : Наука, 2005. – 185 с.

97
ПРИЛОЖЕНИЯ

98 |
Приложения |
|
|
||
|
|
|
Приложение А
ИГРА «В ВОСЕМЬ»
Обычно суть игры «В восемь» – получить из некоторого начального расположения цифр (начальное состояние so So), целевое расположение (целевое состояние st St). Состояния si S в игре «В восемь» представляют собой матрицу размером 3×3, где расположены нетождественные цифры от 1 до 8 (рис. А.1).
so So |
si S |
||
2 |
8 3 |
1 |
2 3 |
1 |
6 4 |
8 |
4 |
7 |
5 |
7 |
6 5 |
Рис. А.1. Цель игры «В восемь»
Приложение А. Игра «В восемь» |
99 |
|
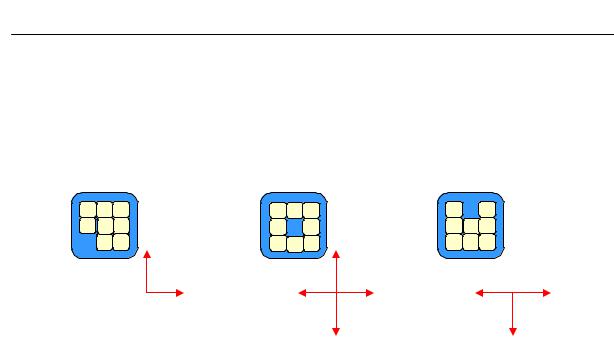
Изменение расположения цифр происходит путем доступного перемещения знака влево, вправо, вверх или вниз. Для упрощения представления о перемещении цифр в игре удобнее представлять доступное перемещение пустого места (пример показан на рис. А.2).
2 |
8 |
3 |
2 |
8 |
3 |
2 |
|
3 |
7 |
1 |
4 |
1 |
|
4 |
1 |
8 |
4 |
|
6 |
|
|
7 |
|
|
||
|
6 |
5 |
7 |
6 |
5 |
6 |
5 |
|
|
7 |
7 |
Рис. А.2. Пример доступных перемещений пустого места типовых состояний в игре «В восемь»
Для инициализации поиска начальное состояние игры должно отличаться от целевого состояния расположением цифр в матрице. Следует отметить, что вместо цифр в игре могут быть использованы иные нетождественные знаки. Все возможные варианты в расположении знаков состояний в игре «В восемь» составляют мощность пространства со-
стояний S = 362 880 состояния. В [6] отмечается, что пространство состояний в игре «В восемь» включает не пересекаемые подпространства. Поэтому при задании начального и целевого состояния следует учитывать это обстоятельство.
Цели игры «В восемь»:
1)поиск, получение из некоторого заданного состояния so So целевое состояние st St;
2)определение кратчайшего расстояния Hi или MS от so до st;
3)выделение оптимального пути Li от so до st.
Задачей является выбор оптимального метода поиска для достижения поставленных целей игры. Задача выбора метода поиска предполагает анализ эффективности методов поиска с позиции выбора вида генерации, проверки и планирования.
Схема преобразования состояний для игры «В восемь» показана на рис. А.3.

100 |
Приложения |
|
|
||
|
|
|
|
2 |
8 3 |
|
|
|
1 |
6 4 |
|
|
|
7 |
5 |
|
|
2 8 3 |
2 |
8 3 |
2 8 |
3 |
1 6 4 |
1 |
4 |
1 6 |
4 |
7 5 |
7 |
6 5 |
7 5 |
|
Рис. А.3. Схема преобразования состояний для игры «В восемь»
Стрелки представляют собой операторы преобразования состояний
fj F.
Например, в поиске по лучу всегда выполняется только одно перемещение пустого места в любом допустимом направлении (их может быть от 2 до 4, рис. А.2). В поиске в глубину выполняются все допустимые перемещения пустого места одного любого состояния из текущего фронта. В поиске в ширину выполняются все допустимые перемещения пустых мест всех состояний всех текущих фронтов.