

30. Эффект Доплера. Его применение.
Эффектом Доплера* называется изменение частоты колебаний, воспринимаемой приемником, при движении источника этих колебаний и приемника друг относительно друга.
1. Источник и приемник покоятся относительно среды, т. е. vист = vпр=0. Если v — скорость распространения звуковой волны в рассматриваемой среда, то длина волны =vT=v/v0. Распространяясь в среде, волна достигнет приемника и вызовет колебания его звукочувствительного элемента с частотой
![]()
2. Приемник приближается к источнику, а источник покоится, т. е. vпр>0, vист=0. В данном случае скорость распространения волны относительно приемника станет равной v + vпр. Так как длина волны при этом не меняется, то
![]()
3. Источник приближается к преемнику, а приемник покоится, т. е. vист >0, vпр=0.
Скорость распространения колебаний зависит лишь от свойств среды, поэтому за время, равное периоду колебаний источника, излученная им волна пройдет в направлении к приемнику расстояние vT (равное длине волны ) независимо от того, движется ли источник или покоится. За это же время источник пройдет в направлении волны расстояние vистT (рис. 224), т. е. длина волны в направлении движения сократится и станет равной '=—vистТ=(v—vист)T, тогда
![]()
4. Источник и приемник движутся относительно друг друга. Используя результаты, полученные для случаев 2 и 3, можно записать выражение для частоты колебаний, воспринимаемых приемником:
![]()
29. Принцип суперпозиции. Интерференция волн. Стоячие волны.
принцип суперпозиции (наложения) волн: при распространении в линейной среде нескольких волн каждая из них распространяется так, как будто другие волны отсутствуют, а результирующее смещение частицы среды в любой момент времени равно геометрической сумме смещений, которые получают частицы, участвуя в каждом из слагающих волновых процессов.
Интерференция:
При наложении когерентных волн возникает интерференция – в одних точках усиление колебаний, в других – их ослабление.
Особым случаем интерференции являются стоячее волны — это волны, образующиеся при наложении двух бегущих воли, распространяющихся навстречу друг другу с одинаковыми частотами и амплитудами, а в случае поперечных волн и одинаковой поляризацией.
![]()
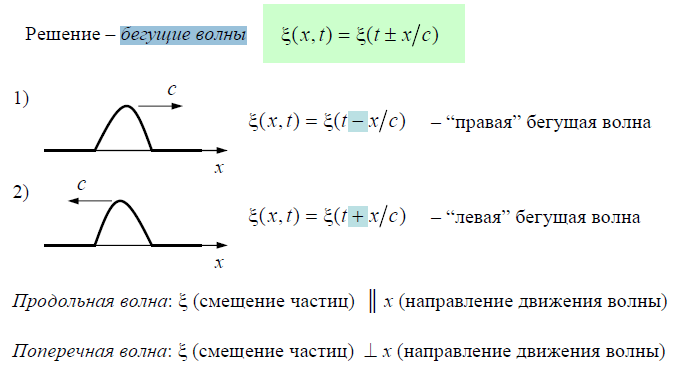
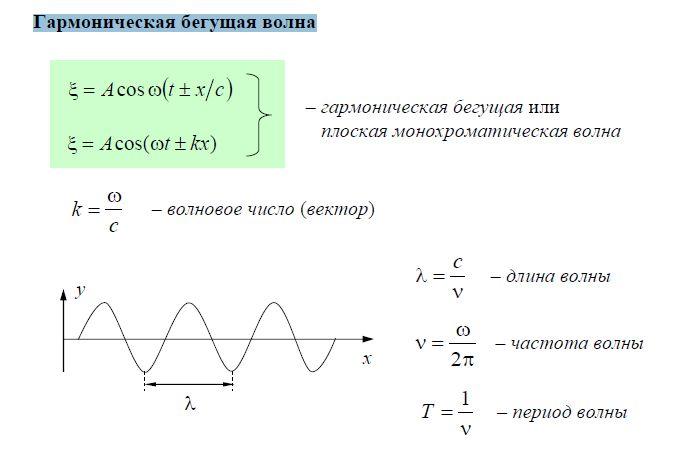
28. Классическое волновое уравнение. Бегущие волны. Гармоническая бегущая волна, ее характеристики (длина волны, частота и др.).
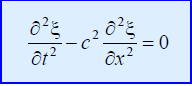 -Классическое волновое
уравнение.
-Классическое волновое
уравнение.
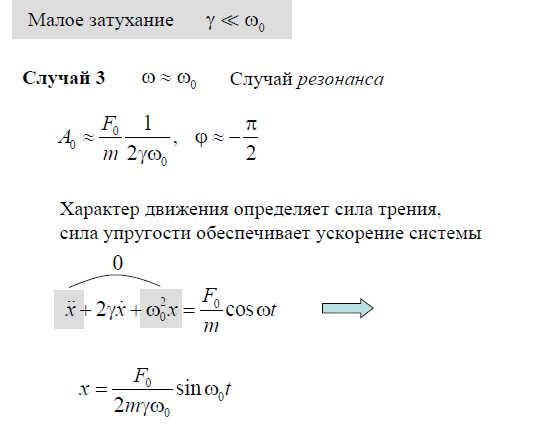
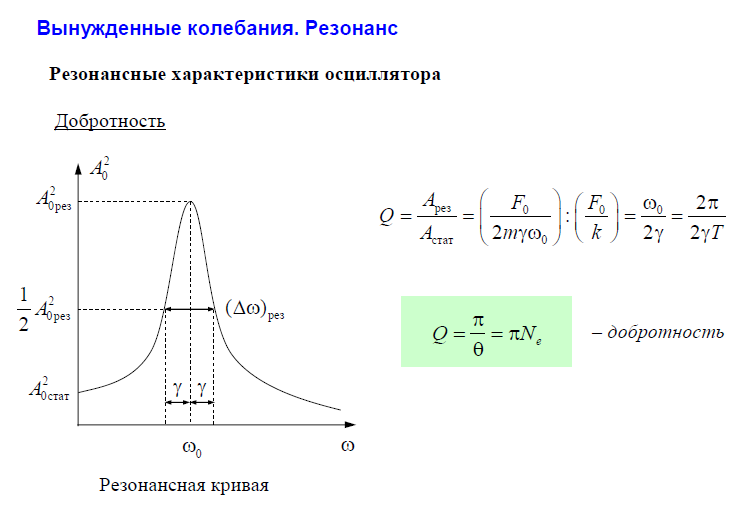
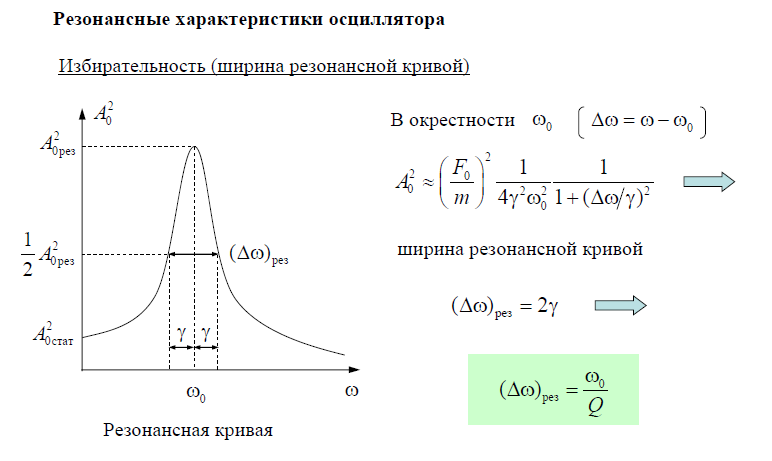
27. Вынужденные колебания. Амплитуда и фаза вынужденных колебаний. Резонанс. Резонансные характеристики осциллятора (добротность,избирательность).
Вынужденные колебания Линейный осциллятор при наличии трения и действии внешних сил.


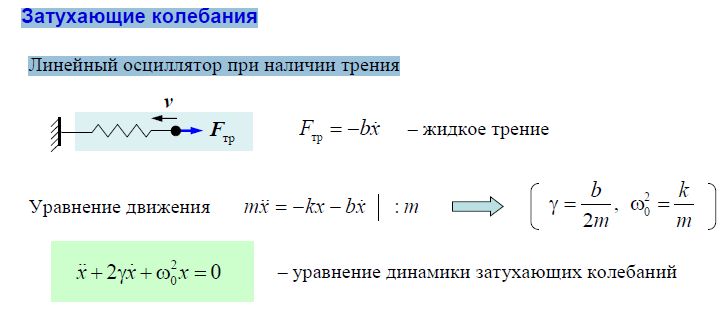
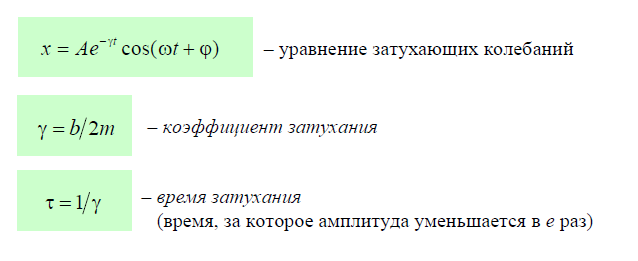
26.
Затухающие колебания. Коэффициент
затухания, время релаксации. Логарифмический
декремент затухания.

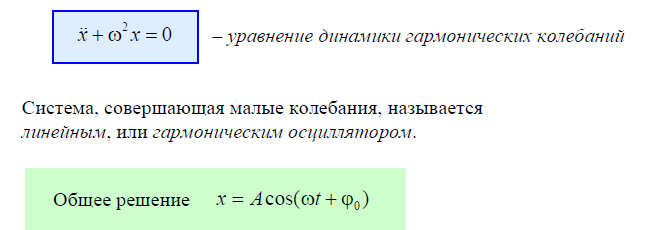
25. Гармонический осциллятор. Уравнение динамики гармонических колебаний. Примеры гармонических осцилляторов: пружинный, физический и математический маятники.
Гармонический осциллятор
Уравнение движения системы, совершающей движение около положения
равновесия при малых отклонениях
1. Пружинный маятник — это груз массой т, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы F = –kx, где k — жесткость пружины. Уравнение движения маятника
![]()
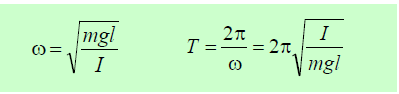
2. Физический маятник — это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, проходящей через точку О, не совпадающую с центром масс С тела (рис. 201).
3.Математический маятник — это идеализированная система, состоящая из материальной точки массой т, подвешенной на нерастяжимой невесомой нити, и колеблющаяся под действием силы тяжести. Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити. Момент инерции математического маятника
![]()
где l — длина маятника.
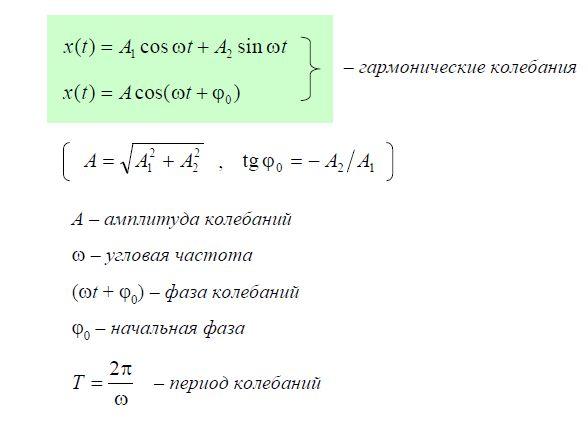
23. Гармонические колебания. Основные характеристики гармонических колебаний: амплитуда, фаза, частота, период.
гармонические колебания — колебания, при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса).
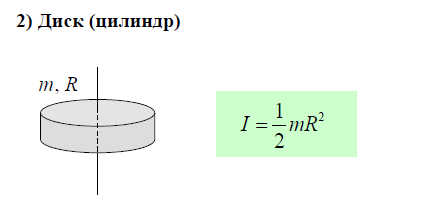
20. Моменты инерции симметричных тел (цилиндр, шар). Теорема Штейнера. Пример применения.
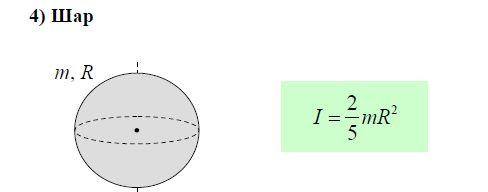
теоремой Штейнера: момент инерции тела J относительно произвольной оси равен моменту его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы т тела на квадрат расстояния а между осями:
![]()
![]()
где
![]() —
известный момент
инерции относительно оси, проходящей
через центр масс тела,
—
известный момент
инерции относительно оси, проходящей
через центр масс тела,
![]() —
искомый момент
инерции относительно параллельной оси,
—
искомый момент
инерции относительно параллельной оси,
![]() —
масса тела,
—
масса тела,
-
— расстояние между указанными осями.
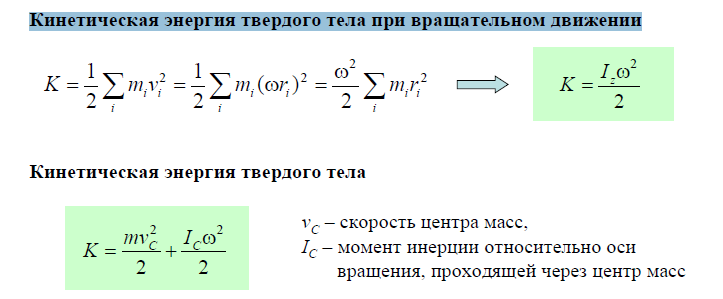
19. Инерция при вращательном движении. Момент инерции. Кинетическая энергия твердого тела при вращательном движении.
относительно неподвижной оси a («осевой момент инерции») — физическая величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
![]() ,
,
где: mi — масса i-й точки, ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси a подобно тому, как масса тела является мерой его инертности в поступательном движении
Моментом инерции системы (тела) относительно данной оси называется физическая величина, равная сумме произведений масс л материальных точек системы на квадраты их расстояний до рассматриваемой оси:
![]()
18. Момент импульса и момент силы относительно неподвижной оси. Уравнение динамики вращательного движения относительно неподвижной оси.
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Момент импульса Lz не зависит от положения точки О на оси z.
момент импульса отдельной частицы равен
![]()
Монет импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:
![]()
Моментом силы относительно неподвижной оси z называется скалярная величина Mz , равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки О данной оси z (рис. 26). Значение момента Мz не зависит от выбора положения точки О на оси z.
Если ось z совпадает с направлением вектора М, то момент силы представляется в виде вектора, совпадающего с осью:
![]()
![]()
где Frsin = Fl =Mz — момент силы относительно оси z. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа
при вращении тела идет на увеличение
его кинетической энергии: dA=dT,
но
![]() поэтому Mzd
= Jzd,
или
поэтому Mzd
= Jzd,
или![]()
Учитывая,
что![]() получаем
получаем
![]()

17.
Уравнение
моментов. Закон сохранения момента
импульса.
закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т. е. не изменяется с течением времени.
16. Момент импульса и момент силы относительно неподвижного начала. Уравнение моментов.
Моментом импульса (количества движения) материальной точки А относительно неподвижной точки О называется физическая величина, определяемая векторным произведением:
![]()
где r — радиус-вектор, проведенный из точки О в точку A, p=mv — импульс материальной точки (рис. 28); L — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к р.
15. Соударение двух тел. Абсолютно упругий и абсолютно неупругий удар.
Удар, или соударение, – это столкновение двух или более тел, при котором взаимодействие длится очень короткое время.


14. Механическая работа и кинетическая энергия. Механическая энергия системы тел. Закон сохранения механической энергии.
E=K+U Механическая энергия (Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.)
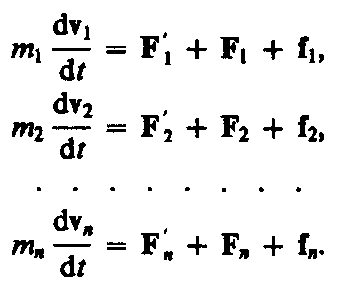
Двигаясь под действием сил, точки системы за интервал времени dt совершают перемещения, соответственно равные dr1, dr2, ..., drn. Умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что dri==vi dt, получим

Сложив эти уравнения, получим
![]() (13.1)
(13.1)
Первый член левой части равенства (13.1)
![]()
где
dT —
приращение кинетической энергии системы.
Второй член
![]() равен элементарной работе внутренних
и внешних консервативных сил, взятой
со знаком минус, т. е. равен элементарному
приращению потенциальной энергии dП
системы (см. (12.2)).
равен элементарной работе внутренних
и внешних консервативных сил, взятой
со знаком минус, т. е. равен элементарному
приращению потенциальной энергии dП
системы (см. (12.2)).
Правая часть равенства (13.1) задает работу внешних неконсервативных сил, действующих на систему. Таким образом, имеем
![]() (13.2)
(13.2)
При переходе системы из состояния 1 в какое-либо состояние 2
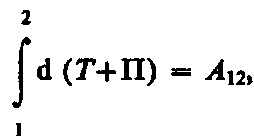
т. е. изменение полной механической энергии системы при переходе из одного состояния в другое равно работе, совершенной при этом внешними неконсервативными силами. Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что
d (T+П) = 0,
откуда
![]()
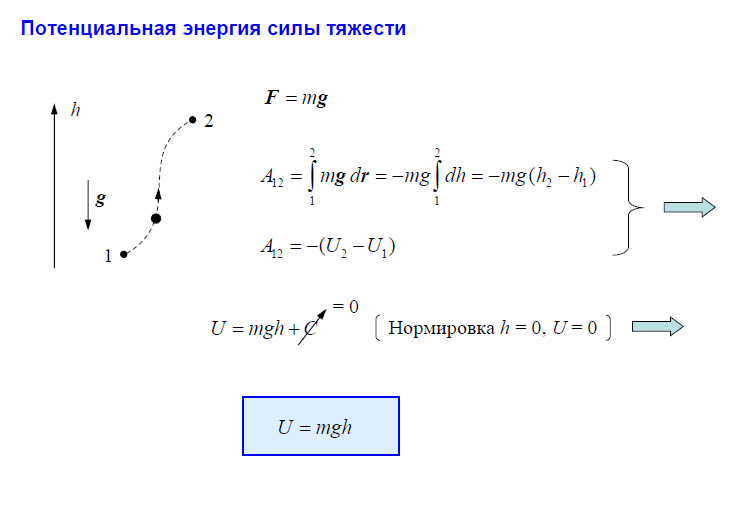
13. Связь между силой и потенциальной энергией. Потенциальные энергии силы тяжести, силы упругости и силы гравитационного взаимодействия.
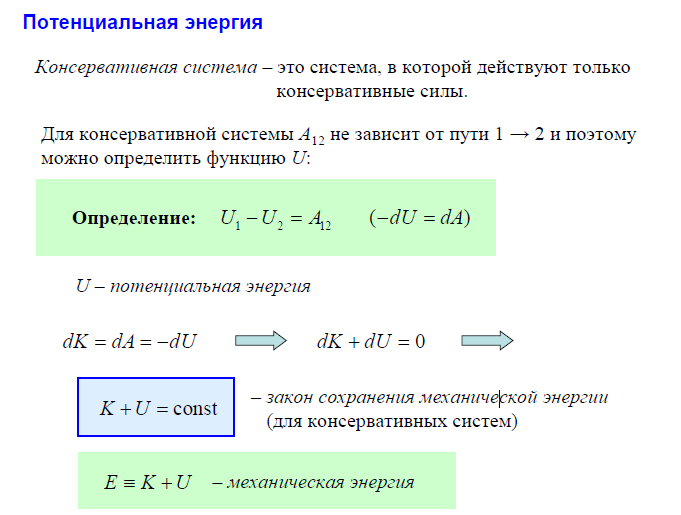


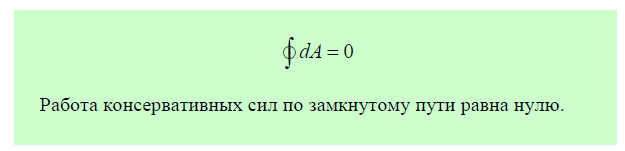
12. Консервативные и неконсервативные силы. Работа консервативных сил. Потенциальная энергия.
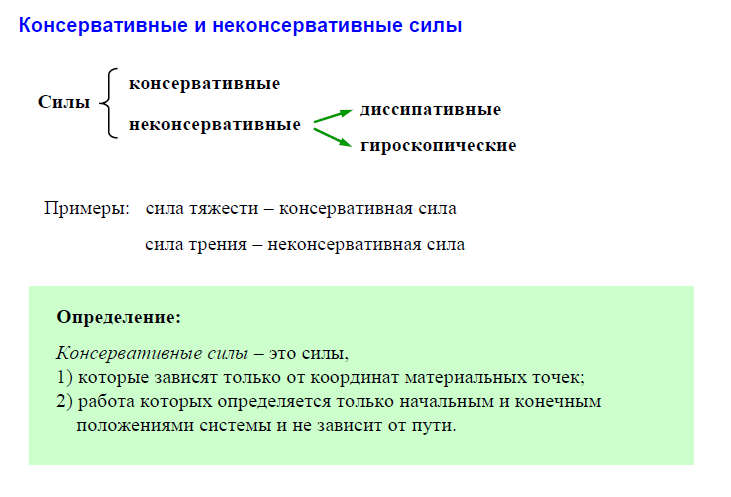
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
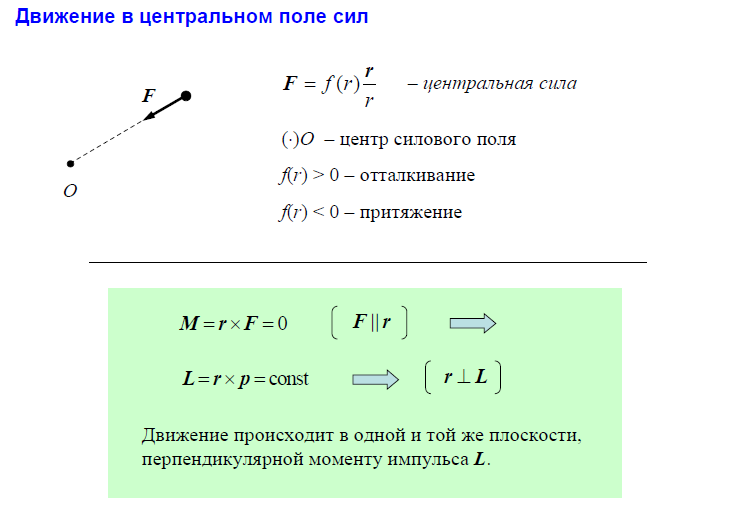
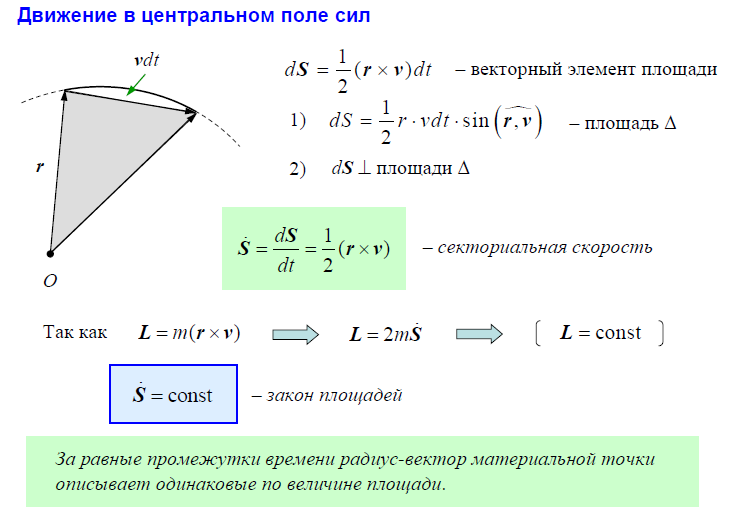
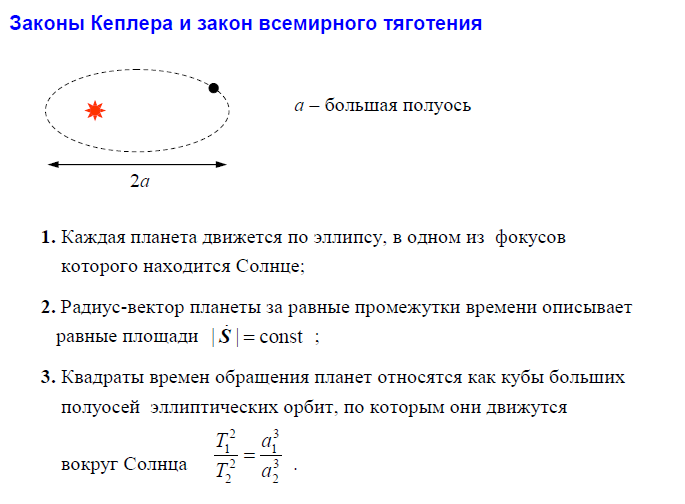
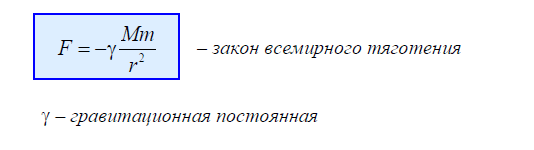
11. Движение в центральном поле сил. Законы Кеплера и закон всемирного тяготения.
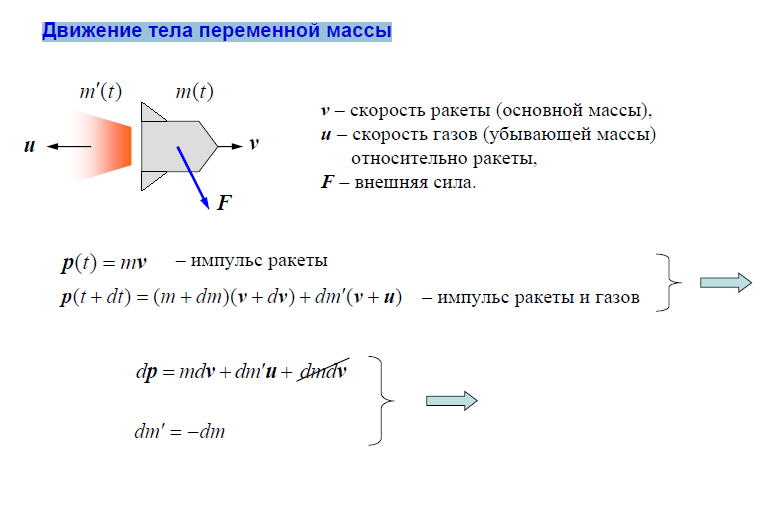
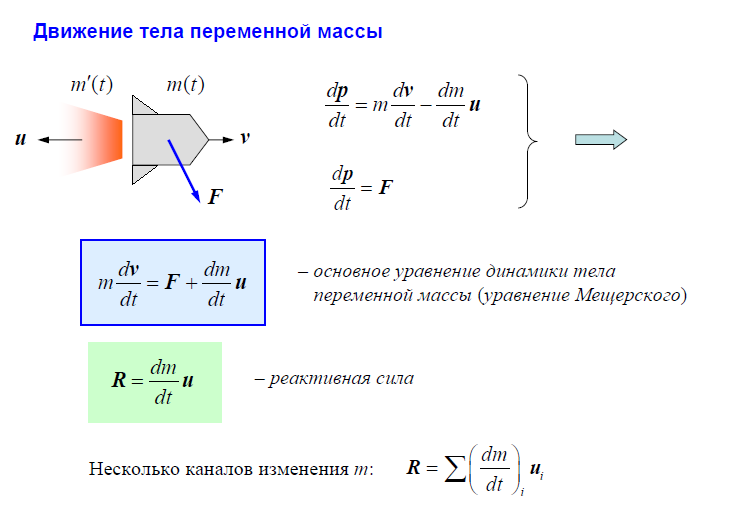
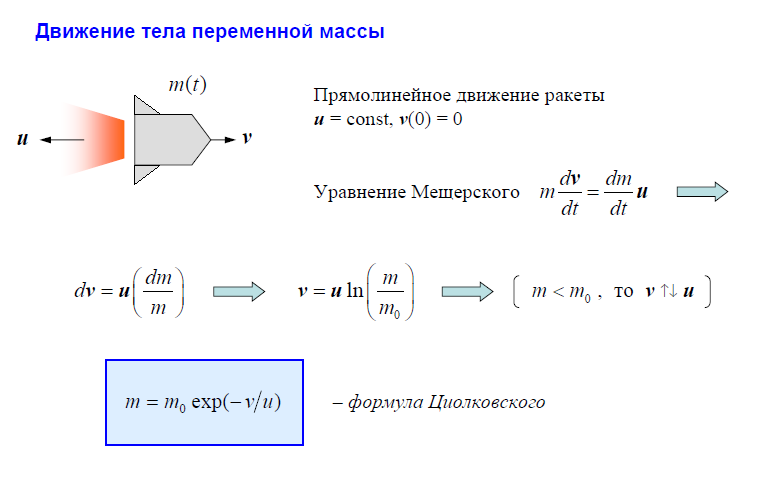
10. Движение тела переменной массы. Уравнение Мещерского.
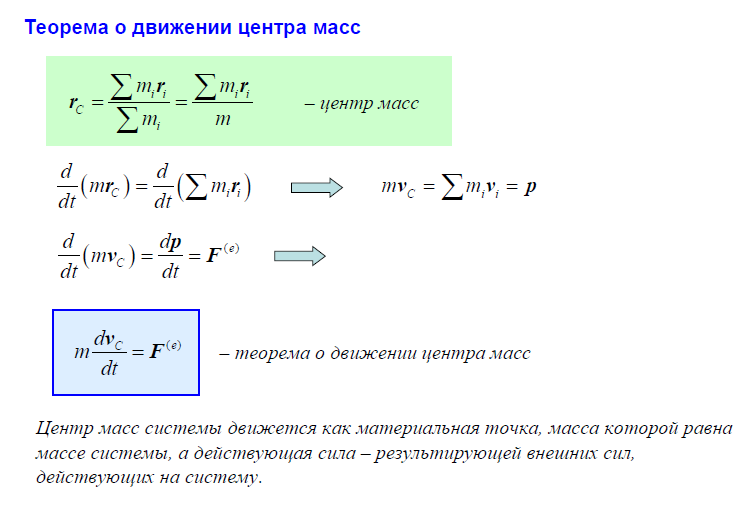
9. Центр масс. Теорема о движении центра масс.
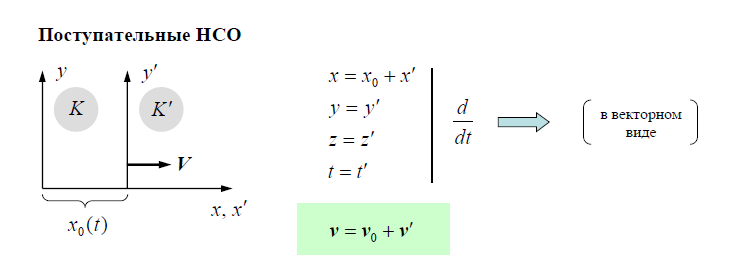
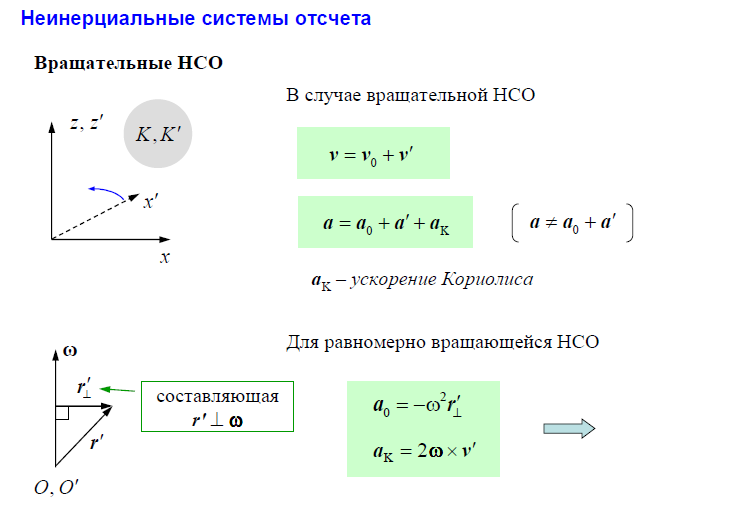
8. Неинерциальные системы отсчета. Силы инерции в поступательных и во вращательных неинерциальных системах отсчета.

7. Третий закон Ньютона. Импульс. Изолированная система. Закон сохранения импульса.

 6.
.
Масса –
это свойство тела, характеризующее его
инертность. При одинаковом воздействии
со стороны окружающих тел одно тело
может быстро изменять свою скорость, а
другое в тех же условиях – значительно
медленнее. Принято говорить, что второе
из этих двух тел обладает большей
инертностью, или, другими словами, второе
тело обладает большей массой
Сила –
это количественная мера взаимодействия
тел. Сила является причиной изменения
скорости тела. В механике Ньютона силы
могут иметь различную физическую
природу: сила трения, сила тяжести,
упругая сила и т. д. Сила является векторной
величиной.
Векторная сумма всех сил, действующих
на тело, называется равнодействующей
силой.
2 Закон Ньютона: в инерциальной системе
отсчёта ускорение, сообщаемое телу,
прямо пропорционально равнодействующей
силе, действующей на тело и обратно
пропорционально массе этого тела.
6.
.
Масса –
это свойство тела, характеризующее его
инертность. При одинаковом воздействии
со стороны окружающих тел одно тело
может быстро изменять свою скорость, а
другое в тех же условиях – значительно
медленнее. Принято говорить, что второе
из этих двух тел обладает большей
инертностью, или, другими словами, второе
тело обладает большей массой
Сила –
это количественная мера взаимодействия
тел. Сила является причиной изменения
скорости тела. В механике Ньютона силы
могут иметь различную физическую
природу: сила трения, сила тяжести,
упругая сила и т. д. Сила является векторной
величиной.
Векторная сумма всех сил, действующих
на тело, называется равнодействующей
силой.
2 Закон Ньютона: в инерциальной системе
отсчёта ускорение, сообщаемое телу,
прямо пропорционально равнодействующей
силе, действующей на тело и обратно
пропорционально массе этого тела.
Сила упругости- сила, возникающая при упругой деформации тел(Закон Гука:F=-k*дельта L)
Сила трения-сила возникающая в плоскости касания тел при их относительном перемещении.
сила
тяготения-
универсальное взаимодействие между
любыми видами материи.
В рамках классической
механики описывается законом
всемирного тяготения,
сформулированным Исааком
Ньютоном в
его труде «Математические
начала натурально философии».
Ньютон получил величину ускорения, с
которым Луна движется
вокруг Земли
положив при расчете, что сила тяготения
убывает обратно
пропорционально квадрату
расстояния от тяготеющего тела. Кроме
этого, им же было установлено, что
ускорение, обусловленное притяжением
одного тела другим, пропорционально произведению
масс этих тел. На основании этих двух
выводов был сформулирован закон
тяготения: любые материальные
частицы притягиваются
по направлению друг к другу с силой ![]() ,
прямо пропорциональной произведению
масс (
,
прямо пропорциональной произведению
масс (![]() и
и ![]() )
и обратно пропорциональной квадрату
расстояния
)
и обратно пропорциональной квадрату
расстояния ![]() между
ними.
между
ними.
5. 5.первый закон Ньютона: любое тело(мат.точка) находится в состоянии покоя или равномерного и прямолинейного движения если на него не действуют другие тела. Такое тело называют свободным, а его движение-свободным движением или движением по инерции. Инерциа́льная систе́ма отсчёта (ИСО) — система отсчёта, в которой справедлив первый закон Ньютона (закон инерции): все свободные тела (то есть такие, на которые не действуют внешние силы или действие этих сил компенсируется) движутся прямолинейно и равномерно или покоятся. В классической механике справедлив механический принцип относительности: законы динамики одинаковы во всех инерциальных системах отсчета. СЛОЖЕНИЯ СКОРОСТЕЙ ЗАКОН - определяет связь между значениями скорости материальной точки по отношению к различным системам отсчёта, движущимся друг относительно друга.
4. угловая скорость-скорость, которая характеризует быстроту движения мат точки по окружности.
Угловое ускорение-ускорение , которое характеризует быстроту изменения угловой скорости со временем.
Связь линейных и угловых скоростей v=wR- линейная скорость вращающейся точки равна векторному произведению угловой скорости на радиус-вектор этой точки.
3. равномерным называют движение с постоянной по модулю скоростью.
Равноускоренное движение происходит с постоянным вектором полного ускорения(равнопеременное)
2. Тангенциальное ускорение характеризует быстроту изменения скорости движения по численному значению и направлена по касательной к траектории. Нормальное ускорение характеризует быстроту изменения скорости по направлению.
1..Система отсчета. Кинематика материальной точки. Траектория и путь. Перемещение, скорость и ускорение материальной точки.
Система отсчета.
система отсчета — совокупность системы координат и часов, связанных с телом отсчета.
Кинематика материальной точки.
При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется скалярными уравнениями
x = x(t), у = y(t), z = z(t), (1.1)
эквивалентными векторному уравнению
r = r(t). (1.2)
Уравнения (1.1) и соответственно (1.2) называются кинематическими уравнениями дви¬жения материальной точки.
Траектория и путь.
Траектория движения материальной точки — линия, описыва¬емая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным.
Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути s и является скалярной функцией времени: s = s(t).
Перемещение, скорость и ускорение материальной точки.
Вектор r = r — r0, проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиуса-вектора точки за рассматриваемый промежуток времени), называется перемещением.
При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения |r| равен пройденному пути s.