

Тормозные режимы асинхронных двигателей
Полная механическая характеристика асинхронного двигателя во всех квадрантах поля Мs, представлена на рис.3.14.
Асинхронный двигатель может работать в трех тормозных режимах: рекуперативного торможения, динамического торможения и торможения противовключением; специфическим тормозным режимом является также конденсаторное торможение.
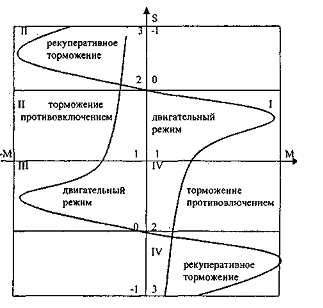
Рис.3.14. Полная механическая характеристика асинхронного двигателя
Рекуперативное генераторное торможение возможно, когда скорость ротора выше скорости вращения электромагнитного поля статора, чему соответствует отрицательное значение скольжения ω > ω0; s < 0 .
Для того, чтобы ротор двигателя перешел синхронную скорость и разогнался до скорости выше синхронной, к его валу должен быть приложен внешний совпадающий со знаком скорости вращающий момент. Это может быть, например, в приводе подъемной лебедки в режиме спуска груза.
Механическая характеристика асинхронного двигателя в режиме рекуперативного торможения идентична (с учетом угловой симметрии) характеристике двигателя в двигательном режиме. Расчет характеристик может производиться по формуле Клосса (3.27), Максимальный момент в режиме рекуперативного торможения несколько выше, чем максимальный момент в двигательном режиме. Для рекуперативного режима
Несколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивлении r1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре.
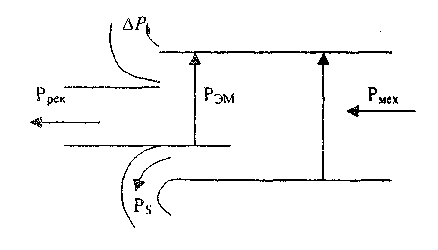
Рис.3.15. Энергетическая диаграмма асинхронного двигателя в режиме рекуперативного торможения
Энергетический баланс в режиме рекуперативного генераторного торможения определяется следующим (рис.3.15). Механическая мощность, поступающая на вал двигателя, преобразуется в электромагнитную мощность вращающегося поля Рэм и электрическую мощность, трансформируемую в роторную цепь двигателя. По аналогии с (3.35) получим
Рмех = Рэм – Рs = Мω0 – М ω0s
Электромагнитная мощность, за исключением потерь в статоре, отдается в питающую сеть, а мощность скольжения рассеивается в роторной цепи.Отметим, что в режиме рекуперативного торможения асинхронный двигатель генерирует и отдает в сеть активную мощность, а для создания электромагнитного поля асинхронный двигатель и в режиме генератора должен обмениваться с сетью реактивной мощностью. Поэтому асинхронная машина не может работать автономным генератором при отключении от сети. Возможно, однако, подключение асинхронной машины к конденсаторным батареям, как к источнику реактивной мощности (см. рис.3.19).
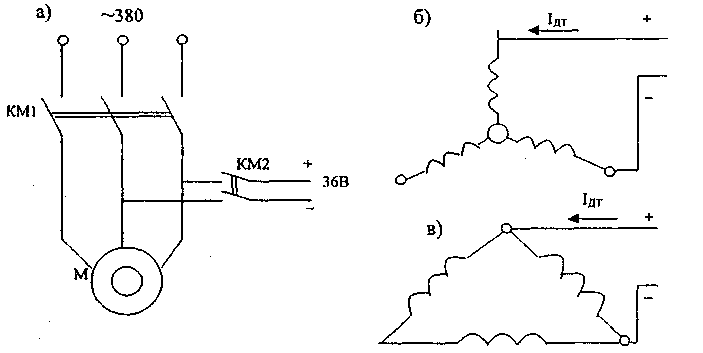
Рис.3.16. Схемы подключения асинхронного двигателя в режиме динамического торможения
Способ динамического торможения характеризуется тем, что статорные обмотки отключаются от сети переменного тока и подключаются к источнику постоянного напряжения (см. рис.3.16). При питании обмоток статора постоянным током создается неподвижное в пространстве электромагнитное поле, т.е. скорость вращения поля статора ω0дт = 0. Скольжение будет равно
sдт = – ω/ ω0н
где ω0н– номинальная угловая скорость вращения поля статора.
Вид механических характеристик (см. рис.3.17) подобен характеристикам в режиме рекуперативного торможения. Исходной точкой характеристик является начало координат. Регулировать интенсивность динамического торможения можно изменяя величину тока возбуждения Iдтв обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. При этом, однако, нужно учитывать, что при токахIдт>I1нначинает сказываться насыщение магнитной цепи двигателя.
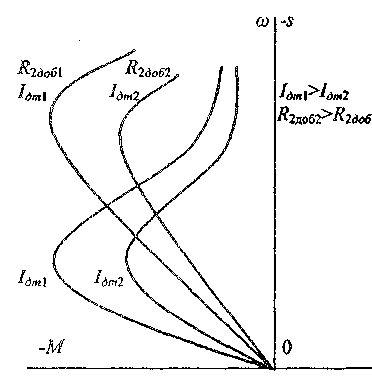
Рис.3.17. Механические характеристики асинхронного двигателя в режиме динамического торможения
Для асинхронных двигателей с фазным ротором регулирование тормозного момента может производиться также введением дополнительного сопротивления в цепь ротора. Эффект от введения добавочного сопротивления аналогичен тому, которое имеет место при пуске асинхронного двигателя: благодаря улучшению cosφ2 повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения
Работу асинхронного двигателя в режиме динамического торможения можно рассматривать как работу трехфазного асинхронного двигателя при питании его постоянным током, т.е. током при частоте f1|=0. Второе отличие заключается в том, что обмотки статора питаются не от источника напряжения, а от источника тока. Следует также иметь в виду, что в схеме динамического торможения ток протекает (при соединении обмоток в звезду) не по трем, а по двум фазным обмоткам.
Энергетически в режиме динамического торможения асинхронный двигатель работает как синхронный генератор, нагруженный на сопротивление роторной цепи двигателя. Вся механическая мощность, поступающая на вал двигателя, при торможении преобразуется в электрическую и идет на нагрев сопротивлений роторной цепи.
Возбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис. 3.19. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.
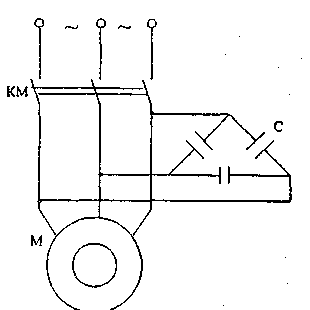
Рис.3.19. Схема включения асинхронного двигателя в режиме динамического торможения с самовозбуждением от конденсаторов
Процесс самовозбуждения асинхронного двигателя происходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с,, под действием которой возникает намагничивающий ток, протекающий через конденсаторы. При этом увеличивается поток машины, следовательно, наводимая э.д.с. и ток намагничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов. Данный способ торможения применяется для приводов малой мощности (до 5кВт), т.к. требует установки конденсаторов значительного объема.
Торможение противовключением может быть в двух случаях:
в первом, когда при работе двигателя необходимо его экстренно остановить, и с этой целью меняют порядок чередования фаз питания обмоток статора двигателя;
во втором, когда электромеханическая система движется в отрицательном направлении под действием спускаемого груза, а двигатель включается в направлении подъема, чтобы ограничить скорость спуска (режим протягивающего груза).
В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше 1
![]() >
1
>
1
В первом случае (см.рис.3.20) двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т. 1, и скорость привода быстро снижается под действием тормозного момента Мт и статического моментаМс. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения.
Во втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.3.20.
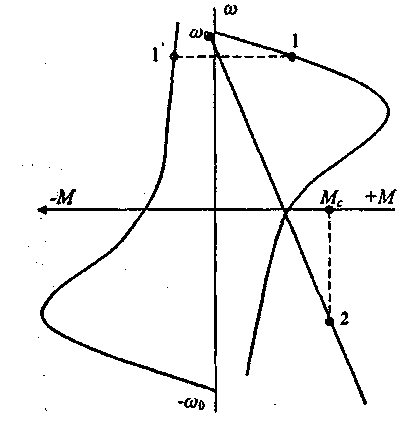
Рис.3.20. Режим противовключения асинхронного двигателя 1, Г - естественные механические характеристики при включении «вперед» и «назад» 2 - механическая характеристика двигателя с фазным ротором со включенным добавочным сопротивлением в цепь ротора.
Энергетически режим противовключения крайне неблагоприятен. Ток в этом режиме для асинхронных короткозамкнутых двигателей превосходит пусковой, достигая 10-кратного значения. Потери в роторной цепи двигателя складываются из потерькороткого замыкания двигателя и мощности, которая передается на вал двигателя при торможении
ΔРsnв = Мтω0 + Мт ω0
Для короткозамкнутых двигателей режим противовключения возможен только в течение нескольких секунд. При использовании двигателей с фазным ротором в режиме противовключения обязательно включение в цепь ротора добавочного сопротивления. В этом случае потери энергии остаются такими же значительными, но они выносятся из объема двигателя в роторные сопротивления.