

Способы регулирования скорости асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0и скольжениемs:
ω = ω0 – sабс
ω = ω0 – ω0s (6.1)
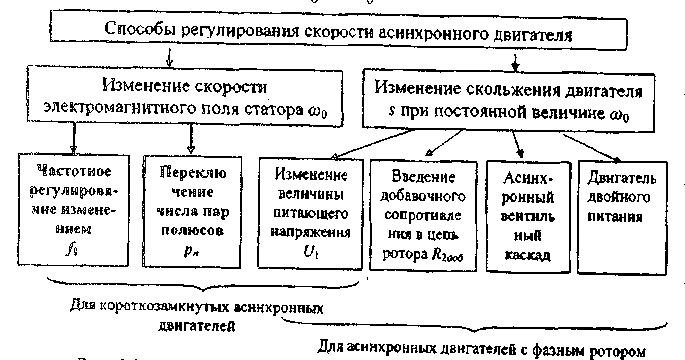
Рис.6.1. Классификация способов регулирования асинхронных двигателей
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателярп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов.