

20 |
|
|
|
|
По формулам (17.7) и (17.8) найти отношения |
M Z1 |
, |
e1 |
. |
M Z 2 |
|
|||
|
|
e2 |
||
5.Сопоставить найденные значения отношений и сделать вывод о результатах проверки основного закона динамики вращательного движения.
Контрольные вопросы
1.Дать определение поступательного и вращательного движения.
2.Сопоставить направление векторов угловых ускорений и скоростей при замедленном и ускоренном вращении.
3.Дать определение момента силы относительно оси.
4.Сформулировать и записать основной закон динамики вращательного движения.
5.Дать определение момента инерции. От чего он зависит?
6.В каких случаях используется теорема Штейнера?
7.В каких случаях механическую систему можно считать замкнутой или изолированной?
8.Сформулировать закон сохранения момента импульса.
9.Записать выражение кинетической энергии при качении тележки с невесомыми колесами и сплошного цилиндра.
10.Какие свойства характеризует масса и момент инерции твердого тела?
11.Как определить путь (угол поворота) в течение заданного промежутка времени, если известны зависимость движущей силы(момент силы) от времени и масса (момент инерции) тела?
21
Лабораторная работа № 19
«Определение коэффициента трения скольжения»
Цель работы – изучение законов вращательного движения, экспериментальное определение коэффициента трения скольжения.
Правила техники безопасности
1.Визуально убедиться в надежности крепления дисков.
2.Нить для раскручивания дисков не должна иметь повреждений, на концах нити должны быть надежные петли для крепления груза и подвеса к штифту установки.
3.Обратить внимание на ограждение места приземления груза. В месте приземления груза не должно быть посторонних предметов.
4.Необходимо надежно закрепить нить на грузе и шкиве установки.
5.Поднимать груз на заданную высоту осторожным вращением дисков.
6.При опускании груза быть внимательным и осторожным.
Описание установки
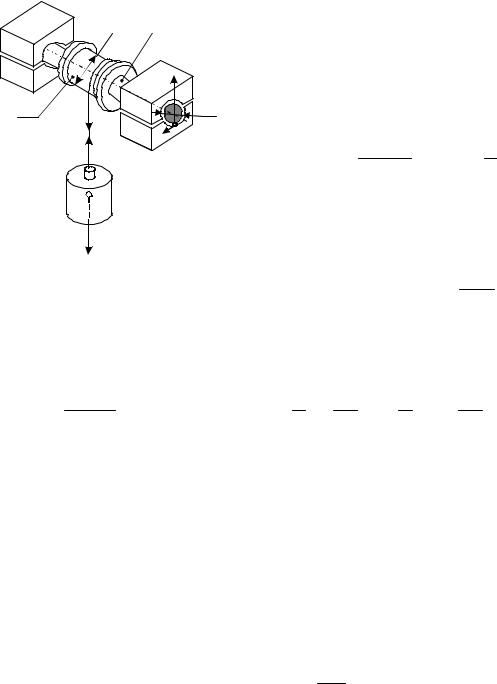
Установка, схематически изображенная на рис. 8, состоит из вала 4, способного вращаться в подшипниках скольжения 1, с жестко укрепленным на нем шкивом 3 и маховиками 5. Вращающий момент на валу создается за счет силы тяжести груза 10, прикрепленного к намотанному на шкив 3 шнуру 11. Фиксация шнура 11 на шкиве 3 осуществляется штифтом 2. Счетчик 7 служит для измерения числа оборотов вала 4.
1 2 3 4
5
6 7
10 |
8 |
|
|
9 |
h |
|
Рис. 8
При выводе расчетной формулы в данной работе принимаются допущения: а) силы трения Fтр
вала 4 о подшипники 1 значительно превосходят сопротивление воздуха движению подвижных частей установки; б) силы Fтр не зависят от скорости
вращения вала 4.
По характеру действующих на вал4 сил все движение разделим на два этапа.
На первом этапе вал4 испытывает на себе действие создаваемого грузом 10 вращающего мо-
мента Mвр и тормозящего |
моментаM тр1 , |
обу- |
|
словленного действием сил тренияFтр1 вала 4 о |
|||
подшипник 1. |
|
|
|
Изменение полной |
механической |
энергии |
|
системы равно работе сил трения: |
|
|
|
D(Wк гр +Wк вр )+ DWр = A , |
(19.1) |
||
|
|
|
|
|
|
22 |
|
|
|
m J2 |
|
|
|
|
|
|
|
где W = |
1 |
; |
W |
p |
= m gh – кинетическая и потенциальная энергия груза10 в |
|||
|
||||||||
кгр |
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Jw 2 |
||
произвольный момент времени t ; W |
|
|||||||
= |
|
– кинетическая энергия вращаю- |
||||||
|
||||||||
|
|
|
|
|
к вр |
|
2 |
|
|
|
|
|
|
|
|
|
|
щихся частей установки; A = -M тр1Dj – работа сил трения за конечный промежу-
ток времени Dt = t1 - t0 ; m1 – масса груза 10; J и h – его скорость и высота над полом в произвольный момент времениt ; J Z – момент инерции вращающихся частей установки относительно оси вала4; w – угловая скорость вала 4 в момент времени t ; Dj - угол поворота вала за время Dt.
Принимая за t0 момент начала движения всей системы, когда W1к гр = 0 и
W1квр = 0 , а за t1 – момент касания грузом 10 пола, когда Wp = 0 , уравнение (19.1)
можно переписать так:
|
|
m |
×J2 |
|
J |
z |
×w2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
1 |
+ |
|
|
|
1 |
- m |
× g × h |
-=M |
тр1 |
×j . |
(19.2) |
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
2 |
|
|
|
|
|
2 |
1 |
0 |
|
|
|
|
1 |
|
||||||
где |
h0 – высота груза 10 |
над |
полом перед началом |
движения; J1 , w1 и j1 – |
|||||||||||||||||||
параметры движения груза 10 и вала в момент времени t1 . |
|
||||||||||||||||||||||
|
Тормозящий момент M тр1 |
обусловлен действием сил тренияFтр1, в каж- |
|||||||||||||||||||||
дом из подшипников и равен |
|
|
|
|
|
|
|
d |
|
|
|
d |
|
|
|
|
|
||||||
|
|
|
|
|
M |
mp1 |
= 2F |
|
|
= 2kN |
, |
|
|
(19.3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
mp1 2 |
2 |
|
|
|
|
|
|||||||
где |
d – диаметр вала в местах подшипников1; |
N1 - сила реакции одного из под- |
|||||||||||||||||||||
шипников на данном этапе движения |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
N = |
m2 g + T |
, |
|
|
|
|
|
|
(19.4) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
m2 - масса вращающихся частей установки; Т - сила натяжения шнура 11 (см. рис. 9). Натяжение Т шнура 11 может быть найдено из основного уравнения динамики поступательного движения, записанного для груза 10:
m1g -T = m1a ,
отсюда T = m1 (g - a), (19.5)
где a – ускорение груза 10.
После подстановки формул (19.3)-(19.5) в уравнение (19.2) получаем
|
m J2 |
|
J w2 |
|
|
-k ×[m g + m (g - a)]× |
d |
|
|
|||||||||
|
1 1 |
+ |
z |
1 |
- m =gh |
|
×j . |
(19.6) |
||||||||||
|
|
|
|
|||||||||||||||
2 |
|
2 |
|
|
1 |
0 |
|
2 |
1 |
|
|
|
|
2 |
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
На втором этапе на вал будет действовать только тормозящий момент |
||||||||||||||||||
|
|
|
|
|
M |
тр2 |
= 2F |
× |
d |
=2k × N |
2 |
× |
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
тр2 |
2 |
|
2 |
|
|
|
|
||||
и уравнение (19.1) примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
DW=квр -M тр2 × Dj. |
|
|
|
|
|
(19.7) |
||||||
|
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
4 |
|
|
За |
|
начальный |
момент |
второго |
этапа |
|||||||||
|
|
|
|
|
примем момент t1 |
касания грузом 10 пола, а за |
|||||||||||||
|
|
|
N |
|
конечный |
момент t2 - |
момент |
полной само- |
|||||||||||
3 |
|
|
d |
|
произвольной |
остановки |
|
|
вала4. |
Поэтому |
|||||||||
|
|
|
уравнение (19.7) запишем так: |
|
|
|
|
||||||||||||
T |
|
|
|
|
|
|
|
|
|||||||||||
|
|
F |
|
|
|
|
J |
|
×w2 |
|
|
d |
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
z |
= 2k × |
N2 |
×j2 , |
|
(19.8) |
|||||||
|
|
тр |
|
|
|
|
|
1 |
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
где j2 - угол поворота |
вала |
на |
втором |
этапе |
||||||||||
|
|
|
|
|
движения; N2 – сила реакции одного из под- |
||||||||||||||
p=m1 g |
|
|
шипников 1 на данном этапе |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
N2 = m2 g . |
|
|
|
|
|
|
|||||
Рис. 9. Схема сил, действую- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
щих на вал установки |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
Используя |
|
выражение |
для N2 , и |
подставляя |
уравнение (19.8) в |
формулу |
|||||||||||||
(19.6), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 ×J12 |
- m × g × h= |
-k × m × g d × |
éæ m2 +1 - a öj + m2 ×j |
2 |
ù. |
|
(19.9) |
|
|||||||||||
2 |
|
1 |
0 |
1 |
2 |
êç m |
|
|
g |
÷ 1 |
m |
|
|
ú |
|
|
|
||
|
|
|
|
|
|
ëè |
1 |
|
|
|
ø |
1 |
|
|
|
û |
|
|
|
Анализ уравнения динамики вращающихся частей установки позволяет сделать вывод, что движение системы на первом этапе является равноускоренным. Поэтому скорость J1 и ускорение a груза 10 в соотношении (19.9) могут
быть выражены как J = |
2h0 |
|
и a = |
2h0 |
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
t1 |
|
|
t12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
Угол j1 связан с высотой h0 и диаметром D |
|
шкива кинематическим соот- |
||||||||||||
ношением h = |
j1D |
, а угол j |
2 |
можно выразить через полный уголj поворота |
||||||||||
|
||||||||||||||
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
вала за время t1 + t2 |
как |
|
|
|
|
|
|
|
2h0 |
|
2h0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
j2 = j -j1= j - |
= |
2p n |
- |
|
, |
||||||
|
|
|
D |
|||||||||||
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
где n - полное число оборотов вала 4 за все время движения в рассматриваемом опыте.
Подстановка этих выражений в уравнение (19.9) и последующие преобразования позволяют получитьрасчетную формулу для коэффициента трения скольжения
|
|
|
|
|
1 - |
|
2h0 |
|
|
|
|
|
D |
|
|
gt 2 |
|
|
|
||||
|
|
|
|
|
|
|
|||||
k = |
|
× |
|
|
|
|
1 |
|
|
. |
(19.10) |
d |
m2 |
× |
Dn |
|
+1 - |
2h0 |
|||||
|
|
|
m1 |
h0 |
gt 2 |
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|