

1.4. Организация устройства ввода – вывода эк1 – 20.
В контролере ЭК1 – 20 используется устройство параллельного
ввода – вывода , выполненное на двух БИС КР580 ВВ55 – программируемый параллельный интерфейс (адаптер), эти микросхемы обеспечивают связь МП с внешними устройствами по 48 линиям, восемь из которых (четыре на ввод и четыре на выход) имеют гальваническую развязку. Микросхема
КР580 ВВ55 (Рис.4) может быть использована для организации синхронного и асинхронного обмена данными, а также для обмена в режиме прерывания программы.
На Рис.4б приведена схема программируемого параллельного интерфейса.
Подключение периферийного оборудования производится через 3 двунаправленных 8 – разрядных порта А, В, С. Порт С разделён пополам и через него можно передавать информацию старших и младших разрядов независимо друг от друга. Управление интерфейсом осуществляется программным путём с помощью регистра управляющего слова (РУС).
Адреса внутренних устройств ввода – вывода ЭК1 – 20 приведены в приложении.
В БИС КР580 ВВ55 можно организовать три режима работы каналов ввода – вывода:
основного (режим 0);
стробируемого двунаправленного.
В основном режиме (0) направление передачи определяется отдельно для каждого из каналов.
При работе с МС КР580 ВВ55 следует иметь ввиду, что:
при подаче сигнала “ СБР ” РУС устанавливается в состояние, при котором каналы А, В, С настраиваются на приём информации в режиме “ 0 ” при этом все остальные триггеры интерфейса сбрасываются в “ 0 ”.
б) при изменении режима работы любого из каналов все внутренние
регистры триггеры интерфейса сбрасываются в состояние логического
“ 0 ”, поэтому для установления управляющих сигналов буфера
канала С в нужное исходное состояние следует воспользоваться
режимом установки – сброса триггеров буфера канала С.

Программирование и обмен данными с интерфейсом осуществляется командами ввода (IN) и вывода (OUT). При выполнении команды IN (адрес порта) контролер считывает число из выходного устройства с адресом порта и записывает его в аккумулятор. При выполнении команды OUT (адрес порта) МП контролера записывает число из аккумулятора в выходное устройство с заданным адресом порта.
Перед началом работы производится инициализация БИС (задание режима работы каждого из каналов МС) путём загрузки управляющего слова.
Формирование управляющего слова приведено на Рис.5.

Таким образом, программирование адаптера осуществляется, как правило, на этапе инициализации системы и заключается в загрузке управляющего слова в регистр управления, этот код в начале загружается в аккумулятор МП
MVI и выводится регистр управления командой OUT.
Микросхема может быть использована для организации синхронного и асинхронного режимов обмена, обмена в режиме прерывания программы.
БИС КР580 ВВ55 применяют для подключения светодиодных индикаторов,
клавиатуры, печатающих устройств, перфоратора, фотосчитывателя, АЦП, ЦАП др. внешних устройств. Установление связи с внешним устройством при этом сводится к написанию программы обслуживаний этого устройства (драйвера).
Для реализации программно – управляемого ввода – вывода с медленно действующими периферийными устройствами применяется режим “ 0 ”,
выводимые данные в этом режиме в регистре – защелке соответствующего канала, а вводимые данные не запоминаются БИС.
На Рис.6 приведен пример интерфейса адаптера с посимвольным принтером и ленточным перфоратором – считывателем. Два устройства вывода (принтер и перфоратор) используют общую шину данных порта А.
Состояние готовности всех сопровождается R – активным сигналом READY.
Передача данных сопровождается L – активным стробирующим сигналом STB. Приказ режима должен задать следует задать следующую конфигурацию адаптера:
порт А – ввод;
порт В – ввод;
порт С1 – (разряды 3 – 0) – ввод;
порт С2 – (разряды 7 – 4) – вывод.
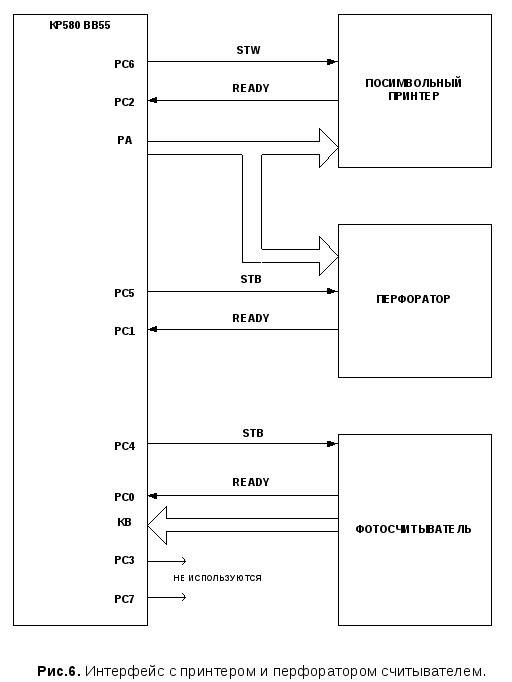
Данную конфигурацию определяет приказ 10000011 в (83) введем следующие символические адреса:
PORT A – порт – A;
PORT B – порт – В;
PORT C – порт – С;
Тогда программа инициализации адаптера запишется следующим образом:
MVI A,834;
OUT CWR;
Для организации ввода – вывода необходимо ещё три подпрограммы для каждого внешнего устройства. Каждая из них при асинхронном обмене должна выполнять следующие действия:
ввод состояния устройства;
проверка готовности ввода или вывода;
формирование соответствующего строба;
если ВУ не готово, МП должен входить в цикл ожидания готовности.
Все описанные выше подпрограммы входят в состав драйверов ВУ.
При построении контролеров ВУ на основе описания БИС, как правило, необходимо применять схемы сопряжения, обеспечивающие усиление сигналов. Собственная же нагрузочная способность МП – один вход последующий ТГЛ – логики.
В заключении раздела приведем ещё один пример: найдём код управляющего слова, если порт А работает на вывод информации из МП, порт В на ввод в МП, порт С (3 – 0) на ввод МП, порт С (7 – 4) на вывод из МП. Имеем: 10000011 или????