

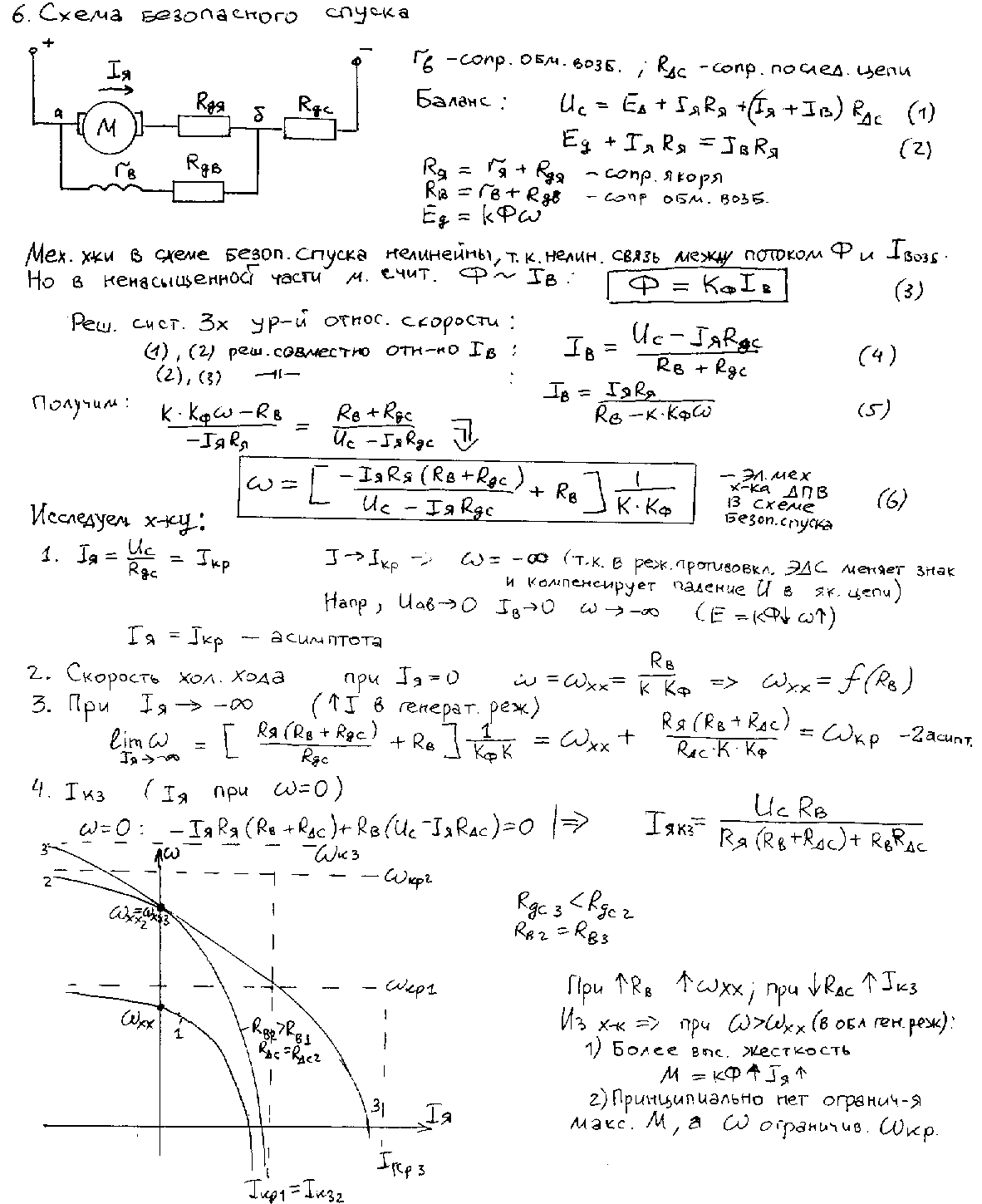
6.Схема безопасного спуска для крановых механизмов с дпт пв
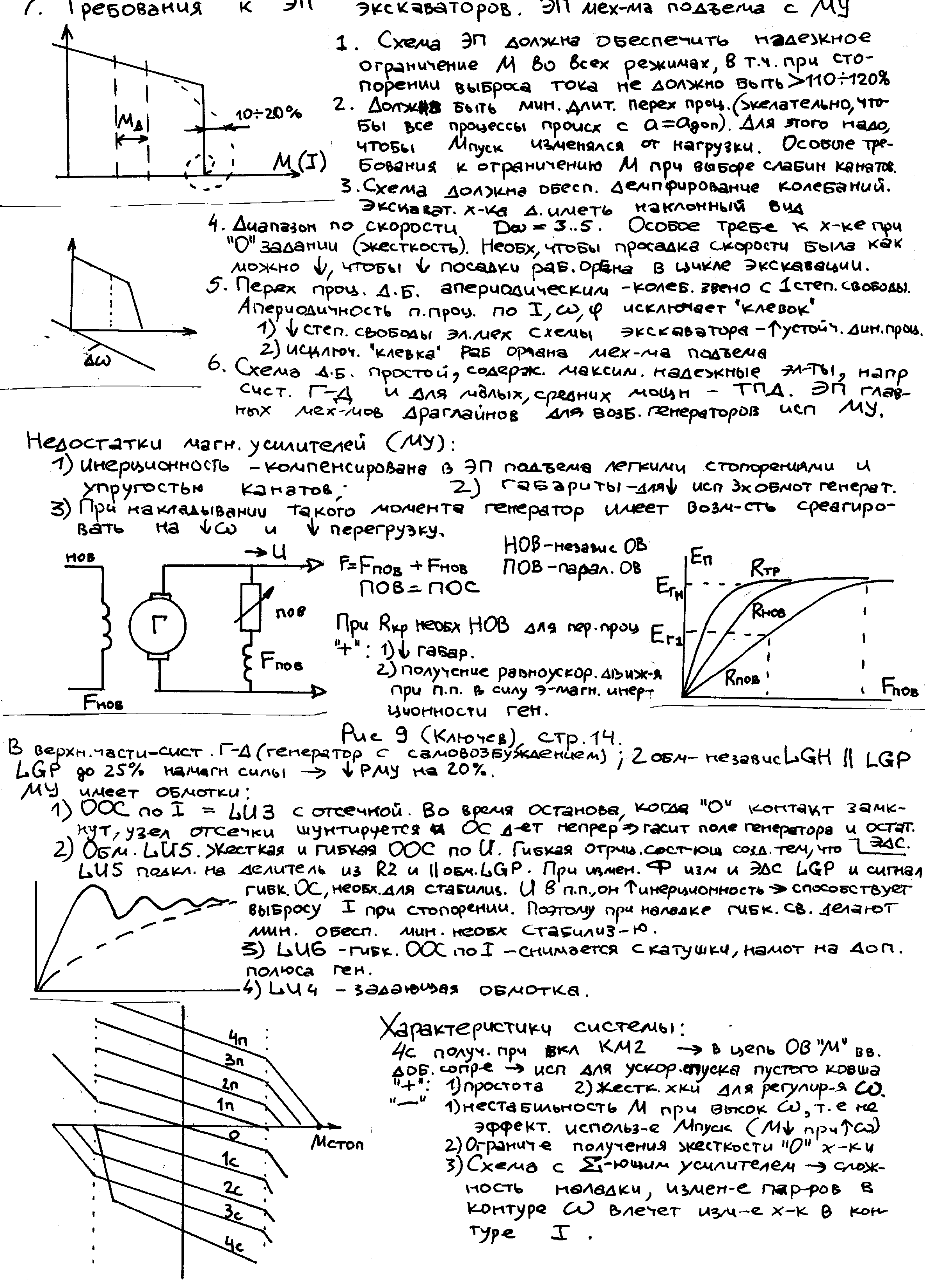
7. Требования, предъявляемые к эп экскаваторов. Эп механизма подъема экскаватора с магнитным усилителем
(
ОВД
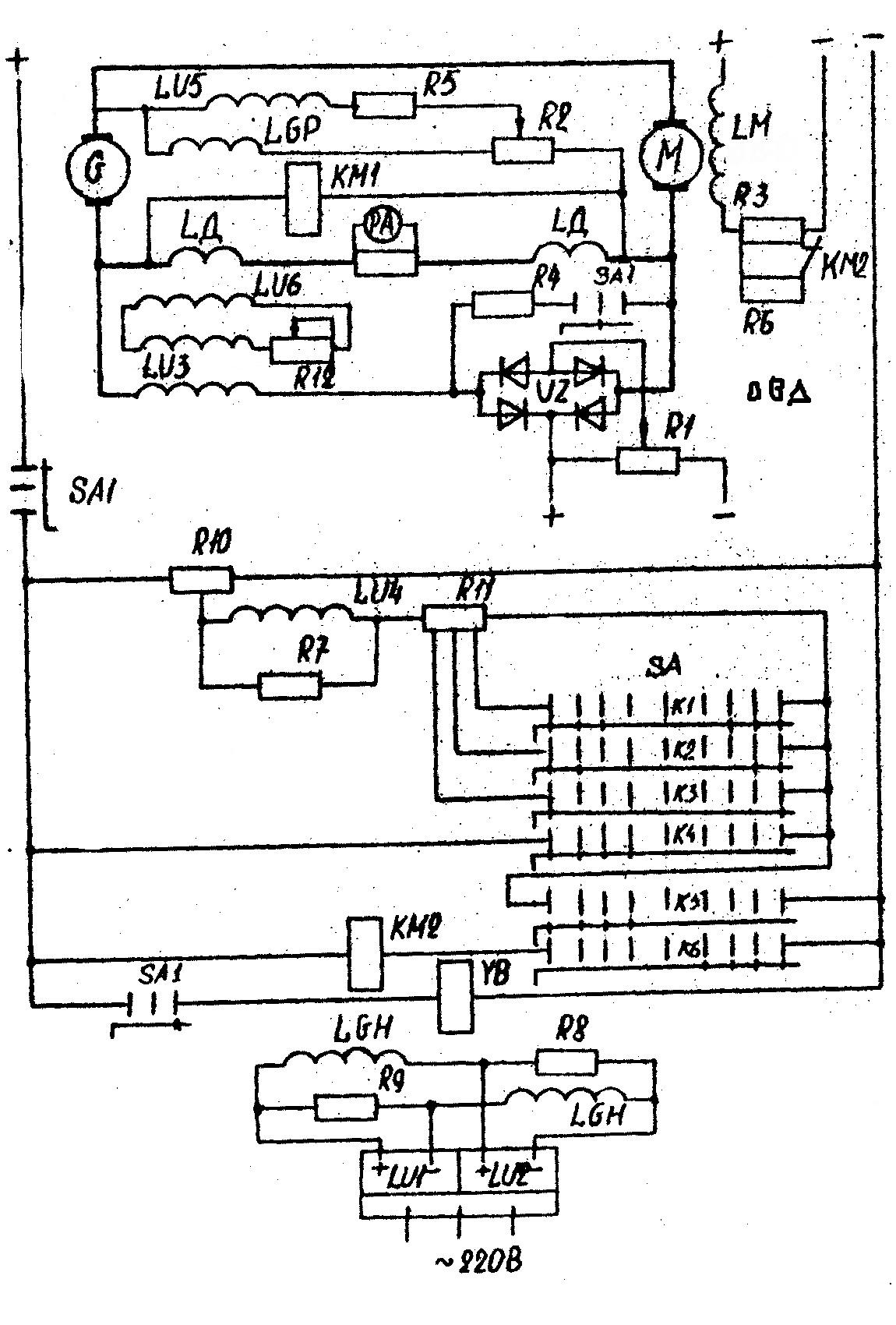
Принципиальная схема электропривода механизма подъема экскаватора с магнитным усилителем.
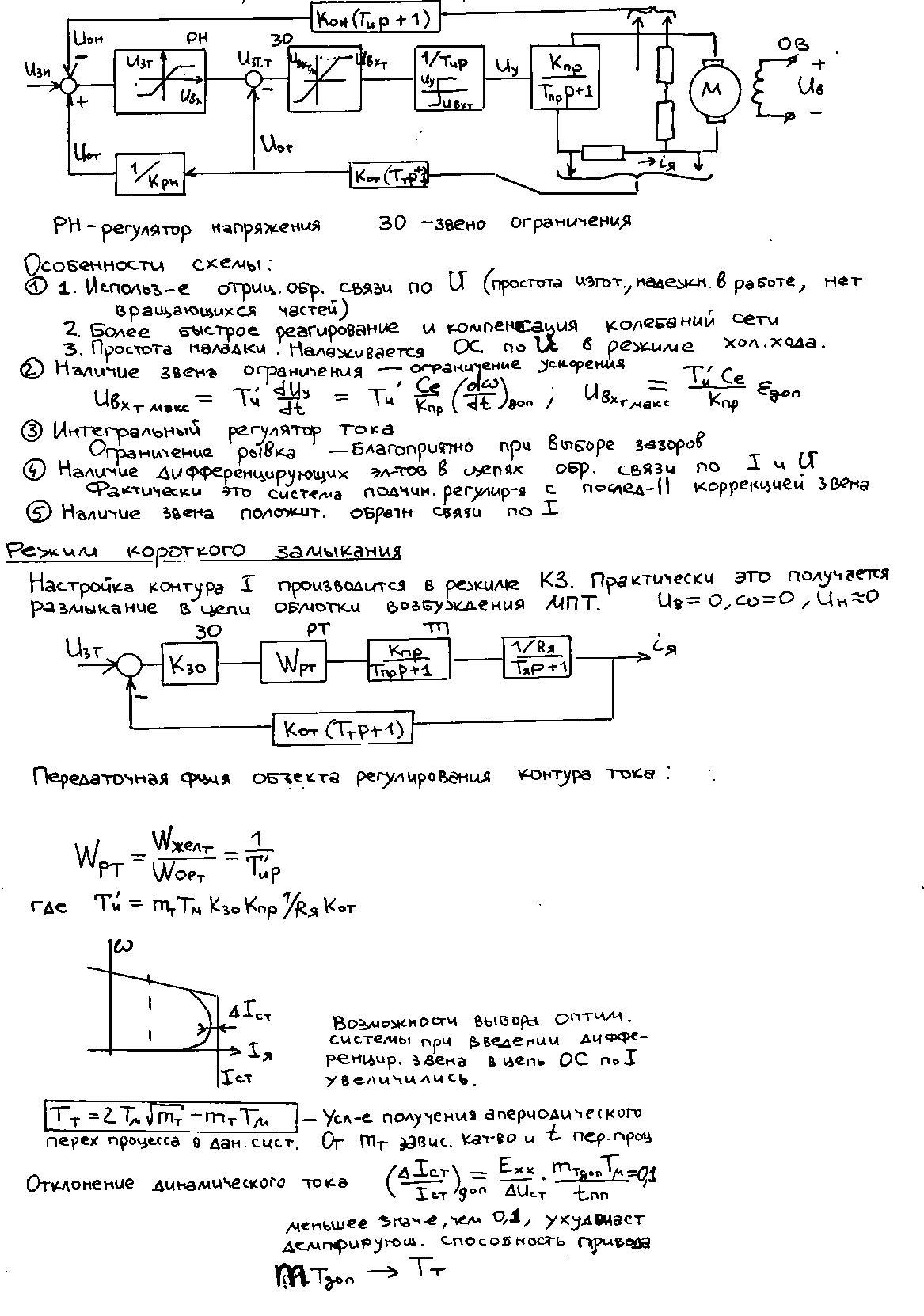
8.Оптимальная структура экскаваторного эп. Режим к3
9.Автоматизация подъемно-транспортных механизмов циклического действия
Необходимое условие автоматизации – наличие определенного числа фиксированных остановок. Тогда весь рабочий процесс будет состоять из отдельных циклов.
К Ш
– канатоведущий шкив
Ш
– канатоведущий шкив
Некоторые механизмы, например перемещения мостового крана, требуют число фиксированных остановок больше 2. Независимо от числа остановок рабочие циклы отличаются лишь исходными и конечными положениями, загрузкой и временем пауз и рабочих движений. Однако в технологическом смысле все циклы одинаковы и состоят из этапов: пуск; перемотка на заданное расстояние; торможение; останов с заданной точностью.
Предъявляются следующие требования к ЭП:
1. Ограничение ускорений во всех режимах
Предъявляется ко всем ПТМ, но по разным причинам:
В ПТМ для перемещения людей ускорение ограничено т.н. «комфортабельным» ускорением (замедлением), при котором человек независимо от возраста и здоровья не испытывает неприятных ощущений. Это ускорение не постоянно. Для пассажирских лифтов – 1,5 м/с2; скоростных – 2…2,5 м/с2; шахтные подъемники (вертикальные) – 0,75; (наклонные) – 0,5.
Для ПТМ не для перевозки людей имеется ограничение по ускорению по нагрузке на металлоконструкции. Для Г/П механизмов для перевозки грузов и имеющих упругие элементы ускорение ограничено величиной колебаний.
2. Необходимость точной остановки
Для пассажирских лифтов точная остановка необходима для удобства и безопасности и сокращения входа (выхода) пассажиров. Чем скоростнее и грузоподъемнее лифт, тем выше точность останова.
Для грузовых ПТМ точность обеспечивает технологический процесс погрузки, выгрузки. Если рабочий орган – скип, то условие точности – погрузка, выгрузка скипа, для вагонетки – необходима точность для этажной площадки.
Во всех случаях нет необходимой точности остановки. Всегда указывается разброс:лифты тихоходные, быстроходные – ±35…50 мм; скоростные ±10…20; больничные ±10;грузовые подъемники: шахтные клетевые – ±100 мм; с вагонетками на рельсах – ±5 мм; шахтные скиповые – ±300 мм.
3. Ограничение рывка.
Точный останов
При автоматизации процесса точного останова действие оператора исключается. Процесс останова начинается с поступления в схему управления импульса с путевого датчика точной остановки (ДТО). Двигатель отключается, накладывается тормоз и далее процесс неуправляем.
Если принять, что отключение двигателя и наложение тормоза происходит одновременно и тормоз прикладывается скачком, весь процесс точного останова делится на 2 этапа:
1 этап обусловлен запаздыванием схемы управления, т.е. двигатель отключается через некоторое время tзапи рабочий орган (РО) проходит расстояниеS1=vнач tзап;
где vнач– скорость, с которой РО подошел к ДТО.
2 этап – после отключения двигателя и наложения тормоза. Вся кинетическая энергия поступательного и вращательного движущихся масс расходуется на пути торможения под действием сил сопротивления нагрузки и тормоза. Баланс энергии на этом участке:
![]() ,
где
,
где![]() – суммарная масса вращающихся и
поступательных движущихся масс;
– суммарная масса вращающихся и
поступательных движущихся масс;![]() – радиус приведения;JΣ– суммарные маховые массы, приведенные
к валу дв.;
– радиус приведения;JΣ– суммарные маховые массы, приведенные
к валу дв.;
Fт– усилие сопротивления движению, создаваемое тормозом;
Fc =Mc/Rпр– усилие сил сопротивлений, создаваемое моментом статической нагрузки;
Мс– момент сил сопротивления, приведенный к валу двигателя.
Таким образом, весь путь, проходимый
рабочим органом:
![]() ;Fдин =Fc
+Fт.
;Fдин =Fc
+Fт.
Величины, определяющие полный путь, непостоянны:
vначзависит от загрузки рабочего органа (РО) иUсети;tзап – от температурыUсети (время работы, смазка);mΣ– от загрузки РО;Fдин– от загрузки и разброса усилий тормоза.