

3.Способы уменьшения механических колебаний
1)
![]() ;
;![]()
И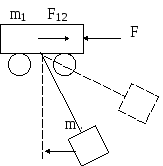 з
уравнений следует, что уменьшить
колебания можно путем ↓ εср,
т.е.нужно ↓ Мпуск(двигатель должен
иметь регулируемый пусковой момент),
увеличить время пуска, уменьшить
производительность.
з
уравнений следует, что уменьшить
колебания можно путем ↓ εср,
т.е.нужно ↓ Мпуск(двигатель должен
иметь регулируемый пусковой момент),
увеличить время пуска, уменьшить
производительность.
2) Раскачивание груза можно предотвратить, если в момент времени π/ω0со стороны двигателя приложить двойной Мпуск. Обратного отклонения не происходит, дальнейшее движение груза происходит с двойным начальным ускорением.
Для реализации этого нужно, чтобы дв-ль имел изменяемый Мпускс диапазономD= 2
3) Уменьшить амплитуду колебаний путем формирования определенного закона управления по времени динамического момента
М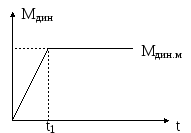 дин.м– макс.момент;t1 –
время разгона до макс.момента
дин.м– макс.момент;t1 –
время разгона до макс.момента
![]() (1)
(1)
Запишем ур-е движения такой 2-хмассовой сист. Из схемы замещения запишем ур-е движения отн-но тела массой J1
![]()
 1 /J1 (2)
1 /J1 (2)
Движение тела с массой J2
–
![]() 1 /J2 (3)
1 /J2 (3)
![]() – дифференцируем дважды
(4)
– дифференцируем дважды
(4)
Получим
![]() (5);
(5);![]() (6)
(6)
Ур-е (2) делим на J1, (3) – наJ2, (2)–(3) и в правую часть подставим (6):
МдинJ2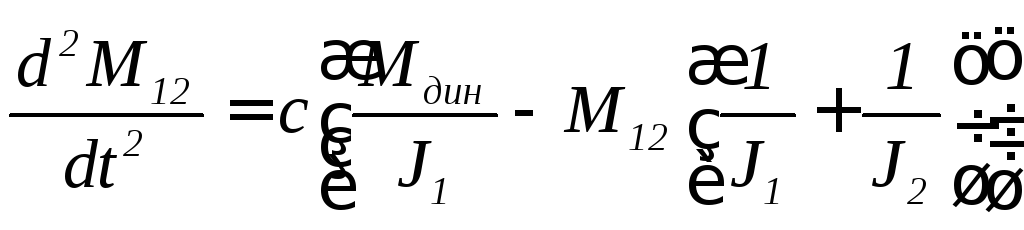
![]() (7)
(7)
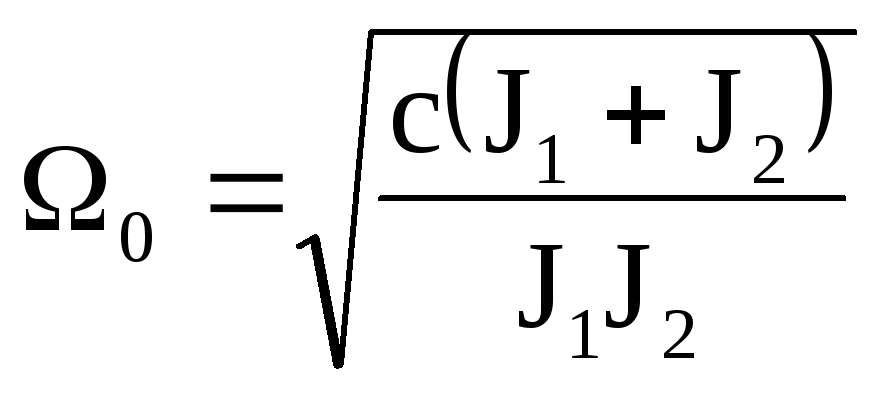 – частота свободных колебаний 2–х
массовой упругой системы
– частота свободных колебаний 2–х
массовой упругой системы
Корни ХУ 2го порядка: р1,2= ±jΩ0.
Общее решение ур-я (7) :
 .
.
К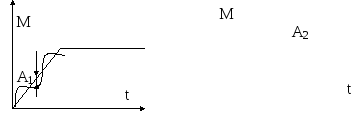 оэф.
А, В из нач.условий (t= 0,Mн= 0): В = 0,
оэф.
А, В из нач.условий (t= 0,Mн= 0): В = 0,![]()
![]()
![]() ,
А1– при постепенном
измен.дин.мом.; А2– при скачкообразном
,
А1– при постепенном
измен.дин.мом.; А2– при скачкообразном
1) Чем ↑время нарастания момента t1, тем ↓ амплитуда отклонений от средней при пуске
2)
![]()
3) Ограничение темпа нарастания момента ограничивает и первую производную от ускорения, что хорошо для переходных процессов.
4.Выбор зазоров в зубчатых передачах
Схема замещения
J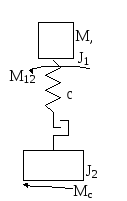 1– момент инерции двиг + жестко связанный
с ним момент инерции тормоза и редуктора;С– жесткость
выходного вала редуктора
1– момент инерции двиг + жестко связанный
с ним момент инерции тормоза и редуктора;С– жесткость
выходного вала редуктора
Δφ – привед. к валу двиг. зазор передачи
J2– момент инерции поворотной платформы с грузом
Процесс выбора зазоров разделяется на 2 этапа:
1) Собственно процесс выбора. В период
выбора мех.связь между J1иJ2отсутствует и
под действием М происходит разгон массJ1. Если М=cosnt,
то![]() .
(1)
.
(1)
Т.к. основные инерц.массы J2 неподвижны, выбор зазора заканчивается ударом, т.е. вся кин.энергия вращающихся массJ1 со скоростью ω0начпревращается в энергю упругих колебаний и частично рассеивается в деформируемых массахJ1 иJ2 (диссипативная составляющая колебаний)
2) Если совместить начало отсчета с временем t1(t=t1), когда маховые массы соприкоснутся, то получим:
![]()
 1 /J1 (2)
1 /J1 (2)
J2 –
![]() 1 /J2 (3)
1 /J2 (3)
![]() (4)
(4)
Считаем, М = constи Мс =const. Получим
![]() (5);
(5);![]() (6)
(6)
Ур-е (2) делим на J1, (3) – наJ2, (1)–(2) и в правую часть подставим (6):
 ;
;
![]() – среднее ускорение
– среднее ускорение
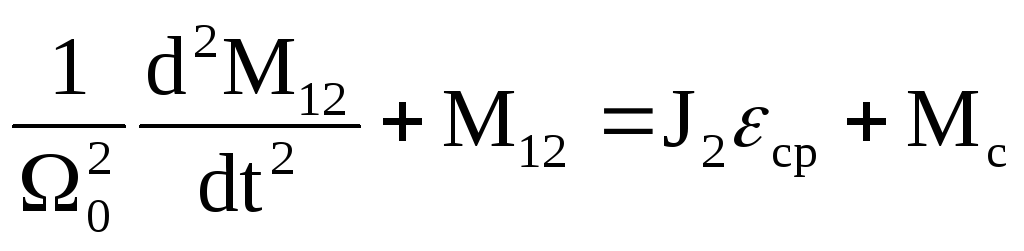
Найдем М12:
![]() ;
;
Получим
![]()
![]()
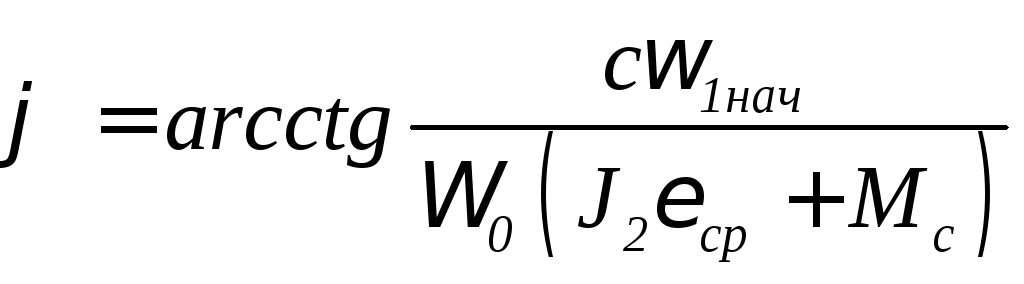
Для наглядности изобразим это на эпюрах.
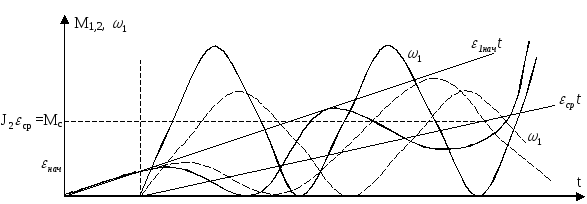
Выбор зазора сопровождается многократным зазорообразованием (–ω1; –М12)
Динамический коэффициент
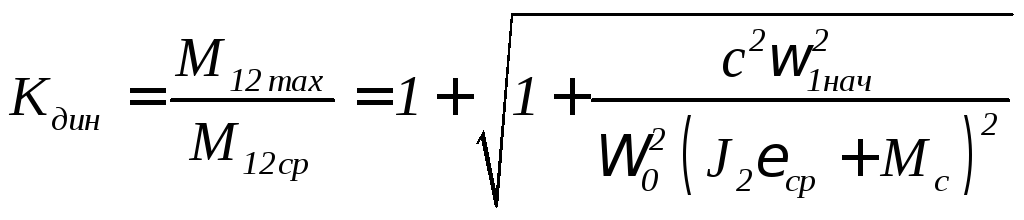
Значит Мmaxбудет при выборе зазоров как минимум в 2 раза больше среднего момента.
Преобразуем –
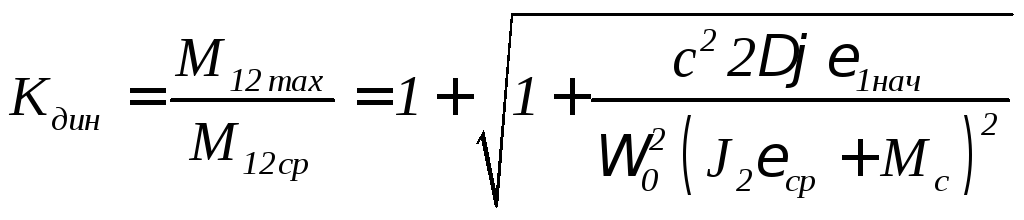
Отсюда следует, что единственный способ уменьшить перегрузки при выборе зазоров – воздействие на ↓ ε1нач= М/J1.
5.Электромеханические колебания резонансного характера
Свойственная зубчатой передаче неравномерность хода порождает периоды возмущения с частотой перехода с зуба на зуб. Если J1>>J2, то это не скажется на работе ЭП. ПриJ2>>J1возмущения в передаче оказывают существенное влияние на колебанияJ1.
Рассмотрим условия возникновения колебаний на механизме поворота. Частота колебаний
![]() ,Zзв –
число зубьев зубчатого венца.
,Zзв –
число зубьев зубчатого венца.
Рассматриваемые мех-мы представим в виде 2-хмассовой системы, склонной к колебаниям с частотой Ω0.
При таких условиях даже небольшие
возмущения, но с частотой
![]() ,
могут вызвать значительные колебания
мех.системы –резонанс.
,
могут вызвать значительные колебания
мех.системы –резонанс.
Средствами ЭП можно уменьшить эти колебания:
1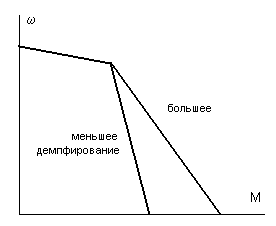 .
Линейная связь между скоростью и моментом
подобна вязкому трению, поэтому
воздействовать на колебания резонансного
характера можно регулированием наклона
падающего участка мех.х-ки. Большее
демпфирование при как можно меньше
наклоне.
.
Линейная связь между скоростью и моментом
подобна вязкому трению, поэтому
воздействовать на колебания резонансного
характера можно регулированием наклона
падающего участка мех.х-ки. Большее
демпфирование при как можно меньше
наклоне.
2. Lяц ↓ демпфирование:
а) ↓ действующее значение тока за счет ↑ индуктивного сопротивления;
б) сдвигает по фазе ток (момент) относительно колебаний скорости.
Однодвигательеый привод ↑ нагрузки до 40% Мпуск.
В многодвигательных ЭП повышается производительность механизмов, например мех-м поворота позволяет уменьшить нагрузку на зубчатый венец.
При последовательномсоединении двигателей они обтекаются одним током
ег= ед1+ ед2+iяR∑
![]()
Однако в динамике при протекании ω1и ω2в противофазе не проявляется и динамические перегрузки превышают среднее значение в 2 и более раз (ω1↓, ω2↑ – измененияIне будет).
При параллельномсоединении даже при колебаниях ω1и ω2 в противофазе есть контур замыкания для каждого тока, т.е. демпфирование ЭП есть в любом случае.
Достоинства || соединения – динамические нагрузки можно уменьшить.
Т.к. динамические нагрузки больше статических, более эффективно || соед. двигателей.

Последовательное и параллельное соединение двигателей