

1.3.6. Сравнение статических тяговых характеристик электромагнитов постоянного и переменного тока
Если площади
полюсов одинаковы, и одинаковы
максимальные значения индукции в
рабочем зазоре, то максимальное значение
силы в электромагните переменного тока
(1.3.8) равно силе, развиваемой электромагнитом
постоянного тока (1.3.5) то есть
![]() .
Так как по формуле (1.3.11) имеем:
.
Так как по формуле (1.3.11) имеем:
![]() ,
,
то при той же затрате стали электромагнит постоянного тока развивает в 2 раза большее усилие, чем электромагнит переменного тока.
1.3.7. Устранение вибрации якоря электромагнита переменного тока
В
Рис. 1.3.4. Полюс с короткозамкнутым
витком

![]() становится >
становится >![]() (силы электромагнита). (
(силы электромагнита). (![]() )
и якорь отрывается от сердечника, когда
)
и якорь отрывается от сердечника, когда![]() – притягивается, то есть якорь будет
вибрировать.
– притягивается, то есть якорь будет
вибрировать.
Для устранения
вибрации на большую часть полюса
устанавливают короткозамкнутый виток
(рис. 1.3.4). Благодаря наличию короткозамкнутого
витка поток
![]() отстает по фазе относительно
отстает по фазе относительно![]() на угол
на угол![]() .
Каждый из потоков под своей частью
полюса создает свою силу
.
Каждый из потоков под своей частью
полюса создает свою силу![]() и
и![]() :
:
![]()
![]() ; (1.3.13)
; (1.3.13)
![]() . (1.3.14)
. (1.3.14)
Результирующая сила, действующая на якорь равна сумме сил F1 и .F2:
![]() . (1.3.15)
. (1.3.15)
Амплитуду переменной
составляющей
![]() определим из векторной диаграммы (рис.
1.3.5):
определим из векторной диаграммы (рис.
1.3.5):
Рис. 1.3.5. Векторная диаграмма
тяговых усилий
![]()

![]()
![]() )
получим:
)
получим:
![]() . (1.3.16)
. (1.3.16)
Электромагниты
проектируются так, чтобы магнитная
сила
![]() ,
развиваемая электромагнитом (рис.
1.3.6) соответствовала выражению:
,
развиваемая электромагнитом (рис.
1.3.6) соответствовала выражению:
(![]() 1.3.17)
1.3.17)
Чем меньше
![]() ,
тем меньше пульсации
,
тем меньше пульсации![]() .
Из уравнения
.
Из уравнения![]() при
при![]() и
и![]() .
Однако эти условия выполнить невозможно:
.
Однако эти условия выполнить невозможно:
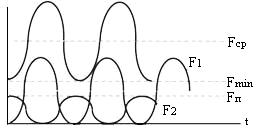
Рис. 1.3.6. Изменение тяговых усилий
![]() . (1.3.18)
. (1.3.18)
где
![]() – круговая частота питающего напряжения;
– круговая частота питающего напряжения;![]() – омическое
сопротивление короткозамкнутого витка;
– омическое
сопротивление короткозамкнутого витка;
![]() – магнитное сопротивление воздушного
зазора под частью полюса, охваченного
короткозамкнутым витком. Чем больше
зазор
– магнитное сопротивление воздушного
зазора под частью полюса, охваченного
короткозамкнутым витком. Чем больше
зазор![]() ,
тем больше магнитное сопротивление
части воздушного зазора
,
тем больше магнитное сопротивление
части воздушного зазора![]()
![]() и меньше угол
и меньше угол![]() ,
а если
,
а если![]() ,
то угол
,
то угол![]() и сдвига фаз между магнитными потоками
и сдвига фаз между магнитными потоками![]() и
и![]() не будет, поэтому полюса шлифуют.
не будет, поэтому полюса шлифуют.
Выбор параметров производят из соотношений:
![]()
где
![]() м.
В 3х фазных электромагните
м.
В 3х фазных электромагните![]() ,
но в каждой катушке сила, изменяясь
проходит через 0 и возникает перекатывание
якоря, вибрация.
,
но в каждой катушке сила, изменяясь
проходит через 0 и возникает перекатывание
якоря, вибрация.
1.3.8. Время срабатывания и отключения электромагнита и способы изменения его быстродействия
Время срабатывания электромагнита:
![]() , (1.3.19)
, (1.3.19)
где
![]() – время
трогания, измеряемое от момента подачи
– время
трогания, измеряемое от момента подачи
![]() до начала движения якоря;
до начала движения якоря;![]() –
время движения подвижной системы
электромагнита.
–
время движения подвижной системы
электромагнита.
При
![]()
![]() т.к.
т.к.![]() ,
тогда уравнение баланса напряжений на
катушке электромагнита:
,
тогда уравнение баланса напряжений на
катушке электромагнита:
(![]() 1.3.20)
1.3.20)
Решая уравнение (1.3.20), получим:

(1.3.21)
Основную часть
времени
![]() составляет
составляет![]() .
.
Основные способы
изменения быстродействия
![]() .
.
1-й способ:
![]() .
.
Обе кривые в начале координат имеют общую касательную (рис. 1.3.7), так как
Рис. 1.3.7. Переходные процессы![]()

не зависит от
![]() и тогда
и тогда
![]() .
.
Однако при
уменьшении величины сопротивления
![]() ,
увеличивается установившееся значение
тока
,
увеличивается установившееся значение
тока![]() ,
а величина натурального логарифма:
,
а величина натурального логарифма:
 ,
,
при
этом уменьшается быстрее, чем растет
![]() .
.
Чем меньше активное сопротивление цепи, тем быстрее будут срабатывать электромагниты при этом способе управления.
2-й способ:
![]() .
.

При
![]() – обмотка
может сгореть.
– обмотка
может сгореть.
3-й способ:
Чтобы не сгорела
обмотка при увеличении напряжения
![]() можно включать добавочные сопротивления
можно включать добавочные сопротивления![]() ,
так чтобы величина установившегося
тока (рис. 1.3.8) была постоянной
,
так чтобы величина установившегося
тока (рис. 1.3.8) была постоянной![]() ,
тогда
,
тогда ,
а
,
а![]() и
и![]() .
.

Рис.1.3.8.Переходные процессы.
При данном способе управления обмоткой электромагнита получаем
![]() .
.
4-й способ:
Увеличить натяжение противодействующей пружины:
![]() .
.
5-й способ:
Магнитопровод
(весь) охватывает короткозамкнутая
обмотка (или гильза). В ней наводится
![]() ,
протекает ток
,
протекает ток![]() и создается магнитный поток
и создается магнитный поток![]() ,
который препятствует нарастанию
основного потока и время трогания
увеличивается.
,
который препятствует нарастанию
основного потока и время трогания
увеличивается.
Время отключения
электромагнита составляет
![]() ,
где
,
где![]() -
время спадания магнитного потока до
величины потока отпускания.
-
время спадания магнитного потока до
величины потока отпускания.
Практически все рассмотренные способы изменения быстродействия могут быть применены и при отключении электромагнита.
При отключении
без короткозамкнутой обмотки на
магнитопроводе обычно
![]() ,
с короткозамкнутой обмоткой магнитная
постоянная спадания потока
,
с короткозамкнутой обмоткой магнитная
постоянная спадания потока![]() может достигать большой величины, так
как величина зазора
может достигать большой величины, так
как величина зазора![]() в первоначальном включенном состоянии
очень мала, магнитная проводимость
в первоначальном включенном состоянии
очень мала, магнитная проводимость![]() – велика, индуктивность
– велика, индуктивность![]() – велика и
– велика и![]() может обеспечиваться
до 10 с.
Другими словами спадание магнитного
потока определяется процессом затухания
тока катушки электромагнита. При
спадании магнитного потока в
короткозамкнутой обмотке наводится
ЭДС и возникает ток, направленный так,
что поток, создаваемый короткозамкнутой
обмоткой, препятствует уменьшению
общего магнитного потока в системе.
Замедленное спадание потока создает
выдержку времени при отпускании.
может обеспечиваться
до 10 с.
Другими словами спадание магнитного
потока определяется процессом затухания
тока катушки электромагнита. При
спадании магнитного потока в
короткозамкнутой обмотке наводится
ЭДС и возникает ток, направленный так,
что поток, создаваемый короткозамкнутой
обмоткой, препятствует уменьшению
общего магнитного потока в системе.
Замедленное спадание потока создает
выдержку времени при отпускании.
При
![]() остаточный поток может создать силу
больше противодействующего усилия
остаточный поток может создать силу
больше противодействующего усилия![]() и произойдет залипание якоря. Для его
устранения в зазоре ставится немагнитная
прокладка, снижающая величину остаточного
потока.
и произойдет залипание якоря. Для его
устранения в зазоре ставится немагнитная
прокладка, снижающая величину остаточного
потока.