

Метода по станкам
.pdfРазработанная коробка скоростей по габаритам укладывается в до-
пустимые пределы.
Структурная сетка для структурной формулы
показана на рис. 1.6. |
|
|
|
|
|
|
||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
IV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
V |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 11 12 13 14 |
15 16 17 18 |
|
|
|
|
|
Рис. 1.6. Структурная сетка |
|
||||
График частот вращения строится по аналогии с графиком обычной множительной структуры.
1.5. Улучшение кинематики использованием сложенных структур
Современные металлорежущие станки имеют широкий диапазон регулирования частот вращения шпинделя. С повышением частот вращения всех звеньев кинематики неизбежно возрастают энергетические потери на трение, возникают вибрации, резко падает КПД станка и т. д.
В практике станкостроения для устранения этих явлений, хотя бы частично, применяют сложенные структуры.
Сложенной называется структура многоскоростного привода, состоящая из двух и более кинематических цепей, каждая из которых является обычной множительной структурой.
Одна из этих цепей предназначена для получения высоких частот вращения и является короткой, а вторая, более длинная, для получения низких частот вращения.
21

Сложенные структуры состоят обычно из двух кинематических цепей (токарно-винторезный станок модели 16К20, токарно-револьверный станок модели 1П365, токарно-карусельный станок модели 1531М и др.). Общее число ступеней для структуры, состоящей из двух цепей, Z = Z1 + Z2 (Z1 и Z2 – число ступеней первой и второй кинематических цепей).
Предположим, что необходимо создать множительную структуру с = 1,41 и диапазоном регулирования частот вращения Rn = 400.
Число ступеней этой структуры будет
Z |
lg Rn |
1 |
lg 400 |
|
1 18,3 . |
|
|
lg |
lg1,41 |
|
|
||||
|
|
|
|
|
|||
Принимаем Z = 18. |
|
|
|
|
|
|
|
Этому соответствует множительная структура Z |
3 3 2 |
18 . |
|||||
Но даже для лучшего варианта переключения Z |
31 33 |
29 диапа- |
|||||
зон регулирования передаточных отношений в последней переборной группе R 9 1, 419 , что значительно больше допустимого R .
Можно воспользоваться структурой с наложением частот вращения 





 , которая позволяет решить эту задачу, но при-
, которая позволяет решить эту задачу, но при-
водит к получению длинной кинематической цепи с повышенной потерей мощности на высоких частотах вращения.
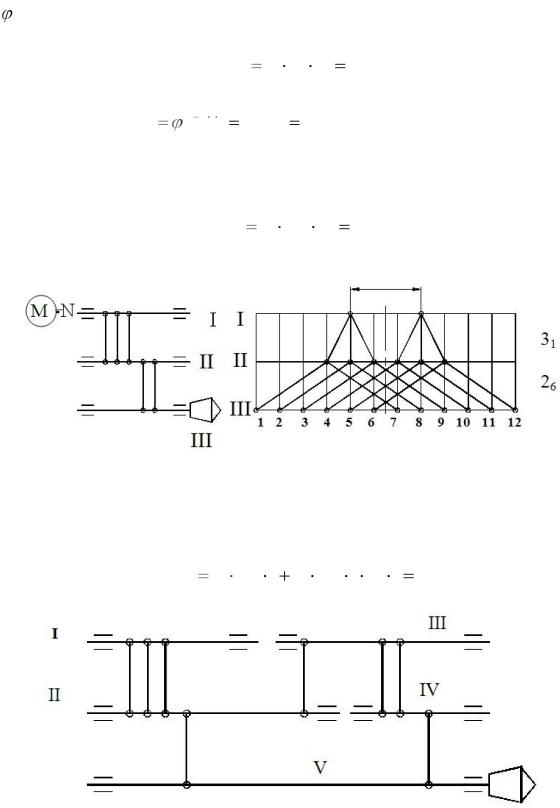
В качестве примера построения структурной сетки и графика частот вращения для сложенных структур примем один из вариантов множительной структуры со структурной формулой
Z 31 23 1 31 23 1 26 1 18.
Упрощенная кинематическая схема для этой структуры показана на рис. 1.7.
Структурная формула расписана по отдельным кинематическим узлам для облегчения построения структурной сетки. Длинная кинематическая цепь с характеристиками групп передач в ней
.
Так как данная цепь обеспечивает 12 ступеней, то для нее выделяем на структурной сетке 12 вертикальных линий (отсчет производится, начиная с первой ступени) и в обычном порядке проводим построение всех лучей групп передач этой структуры.
22
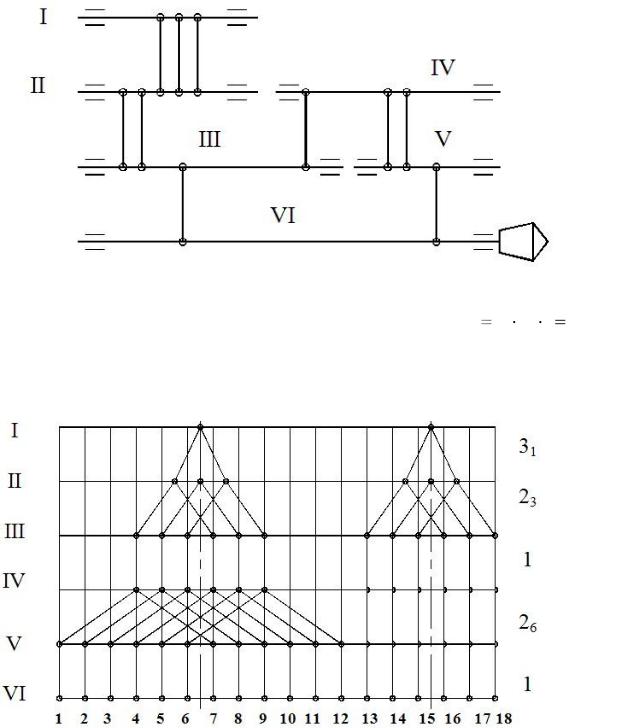
Рис. 1.7. Упрощенная кинематическая схема
Для быстроходной короткой кинематической цепи Z1 31 23 1 6
выделяем оставшиеся 6 вертикальных линий. Группы, расположенные между I и III валами, являются общими. От общей части движение с вала III передается на вал VI, минуя валы IV и V.
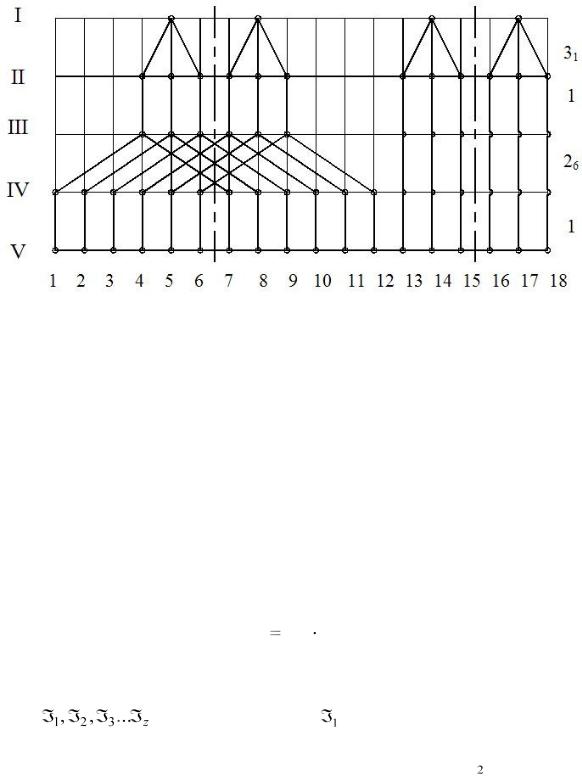
Рис. 1.8. Структурная сетка
Структурная сетка для нашего варианта сложенной структуры приведена на рис. 1.8. А один из вариантов графиков частот вращения для данной структурной сетки изображен на рис. 1.9.
23
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
IV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
VI |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 12 13 |
14 15 |
16 17 18 |
|
|
|
|
|
|
Рис. 1.9. График частот вращения |
|
|||||
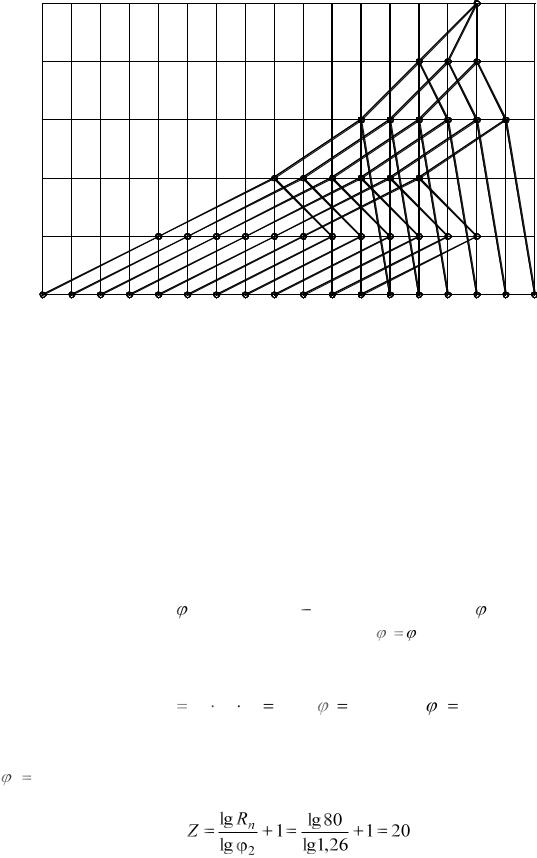
1.6. Множительные структуры с ломаным (неравномерным) геометрическим рядом
Обследование обширного количества универсальных станков показало, что большую часть рабочего времени они эксплуатируются на средних частотах вращения шпинделя. Исходя из экономической целесообразности использования станочного оборудования в коробках скоростей стали применять ломаные геометрические ряды частот вращения, задействуя в средней части диапазона регулирования Rn малое значе-
ние знаменателя ряда |
2, а по краям |
большое значение 1. |
При этом |
|||
обязательно должно быть выполнено условие: |
1 |
2 . |
|
|
||
|
|
|
2 |
|
|
|
Особенности кинематического расчета подобных структур пока- |
||||||
жем на конкретном примере. |
|
|
|
|
|
|
Пусть задано: Z |
Pa Pb Pc 12; |
1 1,58 и |
2 |
1, 26 ; |
диапазон |
|
регулирования частот вращения шпинделя Rn = 80. |
|
|
|
|||
Определяем число ступеней коробки скоростей |
при |
меньшем |
||||
2 1, 26 : |
|
|
|
|
|
|
.
24
|
Число ступеней со знаменателем ряда |
1 |
1,58: |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1 |
2lg R |
1 |
2lg8 |
|
1 |
8 , |
|
|
|
|
|
|
lg |
|
lg1,58 |
|
|
|||||
|
|
|
|
1 |
|
|
|
|
|
|||
где |
R – допускаемый диапазон регулирования передаточных отноше- |
|||||||||||
ний в группах. Характеристика последней переборной группы Рс: |
|
|||||||||||
|
|
|
|
xpc |
Z1 |
1 |
8 1 |
|
4,5. |
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
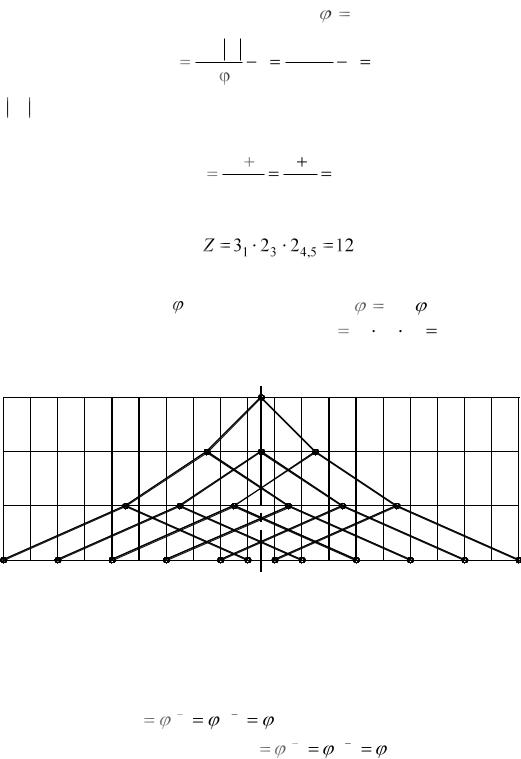
Структурную формулу можно записать в таком виде: |
|
||||||||||
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
Построение структурных сеток и графиков частот вращения ведут |
|||||||||||
при меньших значениях |
2, а, учитывая, что lg 1 |
2lg |
2 , окончательно |
|||||||||
структурная формула будет выглядеть так: Z |
32 |
26 29 |
12 (рис. 1.10). |
|||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
III |
|
|
|
|
|
|
|
|
|
|
|
29 |
|
|
|
|
|
|
|
|
|
|
|
|
|
IV |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
5 |
7 |
9 |
|
10 |
11 12 |
|
14 |
16 |
18 |
20 |
|
|
|
Рис. 1.10. Структурная сетка |
|
|
|||||||
Так, для рассматриваемого случая с ломаным рядом диапазон регу-
лирования будет |
R |
z 1 |
20 1 |
19 |
, а для равномерной структуры |
|||
|
n |
2 |
2 |
|
2 |
|
|
|
диапазон регулирования был бы |
R |
|
z 1 |
12 1 |
11 . |
|||
|
|
|
|
n |
|
2 |
2 |
2 |
Структуры с ломаным рядом позволяют при том же числе валов и передач существенно расширить диапазон регулирования частот вращения, что является важным для универсальных станков.
25
1.7. Множительные структуры с регулируемыми электродвигателями переменного тока
Для уменьшения габаритов коробок скоростей с сохранением диапазона регулирования частот вращения в станкостроении находят применение двух- и реже трехскоростные электродвигатели переменного тока. При этом непрерывный геометрический ряд частот вращения шпинделя будет обеспечиваться только тогда, когда частоты вращения вала электродвигателя при переключении пар полюсов будут изменять-
ся в два раза (nэл. = 750/1500, 1500/3000, 750/1500/3000 мин–1).
Механическая часть коробки скоростей существенно упрощается, так как регулируемый электродвигатель принимает на себя роль одной механической группы передач. При кинематических расчетах регулируемый электродвигатель принимается в качестве первой переборной группы, а в качестве основной – механическая группа с числом передач, зависящих от значения знаменателя ряда . При переключении частот вращения основная группа подготавливает удвоение частот вращения, а удвоение осуществляет электродвигатель переключением на вторую, более высокую, скорость.
Например, проектируется коробка скоростей с = 1,41, удвоение ряда будет подготовлено в том случае, если вначале будем переключать группу передач с двумя передачами на одной частоте вращения вала электродвигателя, при этом на шпинделе получим n1, n2. Частоту вращения n3= 2n1 получим переключением электродвигателя на более высокую скорость, в то время как основная группа вернется в исходное положение. Далее, переключая основную группу, получаем n4, n5 и т. д.
Структурная формула для этого случая будет иметь вид:
Z Pa Pэл. 21 22 4 .
Характеристика переборных групп передач определяется, как и в обычной множительной структуре.
При использовании в коробках скоростей = 1,26 удвоение значения члена ряда частот вращения наступает на четвертом члене, следовательно, в качестве основной группы необходимо принять Pa = 3. И структурная формула будет иметь такой вид:
Z Pa Pэл. 31 23 6 .
Недостаток множительных структур с регулируемыми электродвигателями заключается в том, что они задают жесткий структурный и кинематический вариант, часто нецелесообразный с точки зрения габаритов передач.
26
Например, требуется спроектировать коробку скоростей (Z = 18; = 1,26) с двухскоростным электродвигателем.
Структурная формула для этого случая:
Z 31 23 36 18 .
Диапазон регулирования передаточных отношений в последней пе-
реборной группе R |
(3 1) 3 2 1,2612 16 , что больше допустимого. |
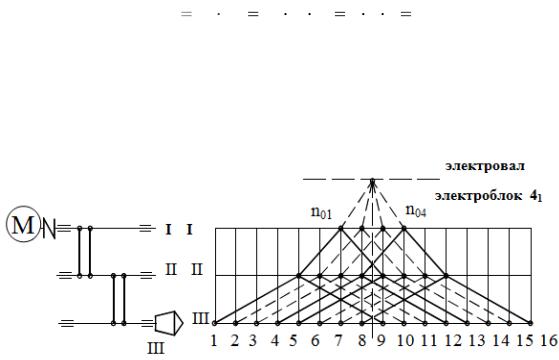
На рис. 1.11 представлена упрощенная кинематическая схема и структурная сетка для множительной структуры с регулируемым электродвигателем переменного тока со структурной формулой:
Z 31 2эл. 26 12 .
lgxэл
Рис. 1.11. Упрощенная кинематическая схема и структурная сетка
На рис. 1.12 показана упрощенная кинематическая схема для сложенной структуры с регулируемым электродвигателем переменного тока
Z 31 2эл. 1 31 2эл. 1 26 1 18.
Рис. 1.12. Упрощенная кинематическая схема
27
На рис. 1.13 изображена структурная сетка для этой структуры.
Рис. 1.13. Структурная сетка
Как следует из рисунков, применение регулируемых электродвигателей переменного тока может привести к упрощению кинематики привода главного движения (сравните рис. 1.3 и рис. 1.11, рис. 1.7 и рис. 1.12) и уменьшению габаритов коробки скоростей.
1.8.Множительные структуры
срегулируемыми электродвигателями постоянного тока
Встанках с ЧПУ и многооперационных станках нашли применение регулируемые электродвигатели постоянного тока с механической коробкой скоростей на 2, 3, 4 ступени. Общий диапазон регулирования таких структур будет
|
Rn Rэл. |
Rмех . |
(1.22) |
|
Предположим, что в структурах |
имеется |
коробка скоростей на |
Z ступеней с соответствующим числом общих передаточных отноше- |
|||
ний: |
. Тогда посредством |
можно получить на шпинделе |
|
непрерывный ряд частот вращения от n1 до n1Rэл. за счет регулирования скорости электродвигателя. На передаточном отношении  получается
получается
непрерывный ряд частот вращения от n1Rэл до n1Rэл2 . или в общем виде:
28

1
2
3
z
Отсюда
Rn
n1 n1Rэл. , n1Rэл. n1Rэ2л. , n1Rэл2 . n1Rэл3 . , n1Rэлz .1 n1Rэлz ..
nmax |
|
n1Rэлz . |
z |
|
|
|
Rэл. . |
nmin |
|
n1 |
|
|
|
Число механических ступеней коробки скоростей
Z |
|
lg Rn |
. |
м |
|
||
|
lg Rэл. |
||
|
|
||
Число электрических ступеней двигателя
lg r
Zэ lg 1,
где r – диапазон регулирования электродвигателя.
Пример. Задано Rn = 32 и r = 2. Тогда
Коробка на четыре ступени может состоять из двух групп:
(1.23)
(1.24)
(1.25)
Особенность дальнейшего кинематического расчета заключается в том, что ряд бесступенчатый, и для него = 1. На структурных сетках расстояние между вертикальными линиями будет lg = lg1 = 0.
Для выхода из этого положения зададим произвольное стандартное значение , например = 1,26, и построим структурную сетку для ступенчатого регулирования.
Определим число электрических ступеней двигателя по форму-
ле (1.25): |
|
|
|
|
|
Zэ |
lg 2 |
1 |
0,301 |
1 4 . |
|
|
|
||||
lg1,26 |
0,1 |
||||
|
|
|
29
Общее число ступеней привода станка
Z Z |
э |
Z |
м |
Z |
P P 4 2 2 16 . |
|
|
|
э 1 2 |
На рис. 1.14 изображена упрощенная кинематическая схема коробки скоростей на Z = 16 ступеней с регулируемым двигателем постоянного тока и структурная сетка. Электродвигатель при кинематических расчетах принимается в качестве основной группы с характеристикой
х = 1.
Рис. 1.14. Упрощенная кинематическая схема и структурная сетка
Построение графика начинают с отметкой на валу I точками значения частот вращения n01–n04, создаваемых двигателем. А далее построение продолжают таким же методом, как и при ступенчатом регулировании.
Кроме валов коробки скоростей (I, II, III), на рис. 1.14 добавлен условный «электровал», передающий четырехступенчатым «электроблоком» вращение первому валу коробки (n01–04). Добавочное построение к структурной сетке позволяет более наглядно представить общую взаимосвязь всех без исключения групп передач, входящих в состав привода.
30