

Критерий устойчивости Михайлова
Система устойчива, если годограф Михайлова, постоянный по характеристическому уравнения замкнутой системы, при изменении ω от 0 до ∞ начинается на вещественной полуоси и последовательно в положительном направлении пересекает n квадрантов, когда при этом n не обращается в 0
Где n-порядок характеристического уравнения
Примеры очертаний годографов разных порядков.

Если годограф проходит через начало координат, то система находится на границе устойчивости


Для
замкнутой системы :


Для
определения устойчивости нет необходимости
по точкам стоить годограф Михайлова-
можно определить точки пересечения с
осями координат и определить квадрант,
в который уходит годограф при

 от сюда следует
что
от сюда следует
что


Найдем точку пересечения с осью ординат
 от сюда следует
что
от сюда следует
что



Определим куда годограф уходит при ω=∞
P(∞)=-∞ Q(∞)=-∞ III квадрант Система устойчива

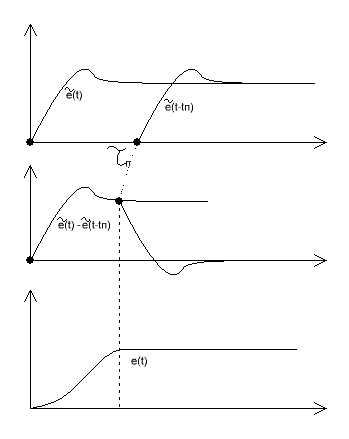
Устойчивость систем с запозданием

Общий
ПФ разомкнутой системы


Суммарный
угол


АФЧХ
 отличается от W(jω)
тем что дополнительно поворачивается
на угол τω
отличается от W(jω)
тем что дополнительно поворачивается
на угол τω
Введение звена запаздывания ухудшает устойчивость( приближается к точке -1)

k=10; T=0,1c; τ=0,5c




У
П К=0.5

Р
Увеличение постоянно времени звена запаздывания так же считает её устойчивость
Устойчивость САУ с бесконечно большим коэффициентом усиления.
Увеличение коэффициента усиления отрицательно сказывается на устойчивости системы
Характеристическое уравнение системы можно записать
anpn+an-1pn-1 +…+a0 + β(dmpm+ dm+1pm-1+…d0)=0 β стремится к ∞ (1)
dmpm+ dm+1pm-1+…d0=0 (2)
Разность порядков равна n-m=1
В этом случае система будет устойчива если все корни характеристического уравнения (2) находится в левой полуплоскости независимой от коэффициента ai
Если система устойчива когда β стремится к ∞ то согласно Теореме Меерова полное характеристическое уравнение системы можно заменит вырожденным
n-m=2
Система будет устойчива если корни уравнения (2) находится в левой комплексной полуплоскости и дополнительно выполняется условие
an-1/an>dm-1/dm (3)
В этом случае тоже модно вместо полного характеристического уравнения оперировать вырожденным
n-m
 2
2
в этом случае не существует условий, при которой система будет устойчива
Достоинством является то, что в определенных условиях можно вместо полного использовать вырожденное характеристическое уравнение, что значительно упрощает задачу анализа и синтеза
Пример:
Найти α, при котором быстродействие будет максимально
β стремится к ∞ ; Т0=0,01с; T= 0,02c; ТM=0,05с; γ=0.1









 n-m=2
n-m=2
Корни исходного в левой комплексной полуплоскости
Время регулирования

Чем
меньше α,
тем больше быстродействия (тем )
)


α c
точки зрения устойчивости α
необходимо увеличить
c
точки зрения устойчивости α
необходимо увеличить
16.Устойчивость САУ по Ляпунову
Прямой метод Ляпунова :
В общем случае любая система описывается системой дифференциальных линейных уравнений:
 (27)
(27)
Если правая часть не зависит от времени t, то система называется автономной.
Устойчивость системы определяется устойчивостью временной системы(27).
Для систем высокого порядка аналитическое решение затруднительно (для систем выше 4го порядка невозможно)
Ляпунов предложил метод определения устойчивости без решения системы(29);
Прямой (второй) метод Ляпунова основана на использовании функции Ляпунова
Функция Ляпунова
- это такая функция, тождественно обращающаяся в нуль при xi =0, где xi
Коэффициенты, входящие в систему уравнений(27)
V=V(x1,x2,…,xi) (28)
Для любой системы можно составить множество функций Ляпунова.
Недостаток метода Ляпунова-отсутствие методики, позволяющей по виду уравнений системы строить функцию Ляпунова.
Система будет асимптотически устойчива если функция Ляпунова является знако-определенной а ей производная будет знака-постоянной и имеющей противоположный знак с функцией Ляпунова:
V>0,
а
 или
или


1)знака-определенная(определенно положительная)
2)знака-постоянная(положительная)
Недостаток прямого метода Ляпунова заключается в том что не существует общей методики состоянии функций Ляпунова, при чем условия устойчивости, получаются с построением функции Ляпунова является сильными, то есть завышенными.
Если систему по Ляпунову окажется устойчивость, то она будет устойчива и в действительности, если же она окажется неустойчивой, то вопрос устойчивости является открытым(может быть устойчивой так и неустойчивой)
Часто функцию Ляпунова принимают в виде квадратной Формы от координат САУ:
V=xTPx (29)
T-символ транспонирования
Р=симметричная матрица, то есть р12=р21, р23=р32 (рij=рji)
Вид квадратной формы определяется собственными значениями матрицы Р. Матрица Р и соответсвенно квадратная форма будет: определенно положительной, определенно отрицательно, знакоположительно, знакооотрицательной, неопределенной если все соответствуюшие значения матрицы соответвенно будут: положительными, отрицательными, знакоположительными ≥0, знакоотрицательными ≤0 или иметь различные значения
Пример: V=x12+2x1x2+2x22+x32
р11=1, р12=р21=1, р22=2, р33=1
det[λE-p]=0-λ

det[λE-p]= =(
λ-1)( λ-1)( λ-2)-( λ-1)=0
=(
λ-1)( λ-1)( λ-2)-( λ-1)=0
(λ-1)[( λ-1)( λ-2)-1]=0
(λ-1)( λ2-3λ+1)=0
λ1=1>0;
λ2,3=1,5± =1,5±1,1
λ2=2,6
λ3=0,4
=1,5±1,1
λ2=2,6
λ3=0,4
λi>0 => V>0
Функция Ляпунова-знакоположительна
Существует критерий Сильвестра, позволяющий определить вид квадратичной формы без нахождения собственных значений матрицы p. Этот критерий формирцется следуюшим образом: квадратная форма будет: определенно положительной, определенно отрицательной, знакоположительной, знакоотрицательной, неопределенно если угловые миноры матрцы Р будут положительный, отрицательные, неотрицательными, не положительный итд
Пример: Условие смотри выше

 квадратная форма
определенно положительная
квадратная форма
определенно положительная
Устойчивость линейных САУ по Ляпунову
Функция Ляпунова в виде квадратной формы (вид (29))
Уравнение состояния для свободного движения системы имеет вид:
 (свободное
движение)
(30)
(свободное
движение)
(30)


 (31)
(31)

Если
Q
положительно спроектирована, то
 ,
т.е. система асимптотически устойчива.
,
т.е. система асимптотически устойчива.
Условие устойчивости: Если для всех положительно-определенной матрицы Q найдется положительно-определенная матрица Р , удовлетворяющее условию (31), то система будет асимптотически устойчива.
Используя функцию Ляпунова, полученно в общем виде условие устойчивости для линейных САУ, то есть при определении устойчивости таких систем нет необходимости составлять функцию Ляпунова, можно сразу пользоватся условием(31).

Для составления матрицы А по стр. схеме запишем уравнения состояний




Составим матрицу Q

(Обычно берут еденичную матрицу, её условные миноры не равны 0)
Матрица Р (симметрическая)








При
всех значениях поворота
 система асимптатически устойчива
система асимптатически устойчива
УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ САУ
Поведение САУ может быть описано системой нелинейных д.у,которые могут быть разложены в ряд Тейлора, могут быть представлены в виде 1,2,3, приближений. Ляпунов показал, что все случаи определяют устойчивость, система может быть разделены на 2 категории: некритические и критические случаи.
Для некритических случаев 2 теоремы Ляпунова:
1.если вещественные части корней характерестического уравнения первого приближения отрицательны, то система устойчива не зависимо от остальных членов.
2.если среди корней корней характерестического уравнения первого приближения найдётся хотя бы один с положительной вещественной частью ,то система не устойчива,независимо от остальных членов разложения.
Критический случай соотв.ситуации,когда хотя бы один из корней равен нулю.Тогда для опеределения устойчивости будем использовать функцию Ляпунова.(этот метод называется прямой)
Система является
нелинейной из-за квадратов и кубов,
умножения.

Уравнения состояния:


Линейное уравенение первого приближения имеет вид
 ;
;


det[PE-A]=0

Корни (2) с отрицательной вешественной частью –некретический случай
Дальше сиситема является устойчивой
Для рекоторый свойств определение устойчивости не предостовляет затруднений
Пример:
 (см. выше)
(см. выше)


A=
det[PE-A]=0

Для определения устойчивости необходимо использовать функцию Ляпунова

С учетом (32) и (33) производная будет иметь вид

Система ассимптотически устойчива.


Нельзя определить вид производной функции Ляпунова- исходная функция выбрана неудачно
Синтез САУ
Синтез САУ- определение структуры и параметров управляющего устройства, обеспечивающее задание статических и динамических показателей системы
Задача синтеза более сложно по с сравнению с задачей анализа. Общей методикой синтеза САУ не сущ (в ней время)
Все методы синтеза можно разделить на 2 группы:
Частотные и аналитические. Частотные основаны на использовании частотных характеристик системы. К амплитудным относят метод переметрической оптимизации, метод последовательной оптимизации контуров, метод модального управления, различные методы основанные на использовании на теории оптимального управления (пр-п Максимумс Потряшня, метод динамического прогревания, метод классического вариационного исчисления итд)
В настояшее время более широко применяется аналитические методы, которые являются более точными по с сравнению с частотными)
Частотный метод синтеза САУ
Основан на том, что существует определенная связь между ЧХ и переходной характеристикой системы
Переходная: различия система на еденицу ступенчатого воздействия
Частотная: различия на гармоническую входную воздействия
Связь определяется следующем выродением вещественно частотной характеристики ВЧХ

Для того, что бы перерегулировать сисему не превышающую 18х необходимо, что бы ВЧХ была положительна и не возрастала


Для
того что бы перерегулирование
 необходимо, что бы ВЧХ была монотонно
убывающей
необходимо, что бы ВЧХ была монотонно
убывающей

Все ВЧХ характерезуются частотой положительности(частота при которой ВЧХ положитльна) P(ω)<3%P(o)
 время регулирования,
начало с которого процесс установился
(выходные координатыы не выходнят за
пределы 5хотеля)
время регулирования,
начало с которого процесс установился
(выходные координатыы не выходнят за
пределы 5хотеля)
Синтез последовательного и параллельного корректирующего устройства методом ЛАХ
последовательно

Wн.с. – передаточная функции разомкнутой не скорректированной системы
Wк.у – передаточная функции корректирующего устройства, которое необхлдимо определить
Ap(ω)=Aку(ω)·Aнс(ω)
Если прологарифмировать это выражение, то получим
20lg Ap(ω)=20lg Aку(ω)+20lg Aнс(ω) L(ω)=20lgA(ω)
Lp (ω)=Lку(ω)+Lнс(ω)=Lж(ω) Lж – желаемое ЛАХ
Lp (ω) – ЛАХ разомкнутой скорректированной системы
Lку(ω)=
Lж(ω)
- Lнс(ω);
Wнс= ;
;
Wку=
Синтез параллельного корректирующего устройства
Недостатком последовательного корректирующего устройства является высокая чувствительность к изменению параметров объектов управления. Системы с параллельной коррекцией обладают меньшей чувствительностью.

W0 – передаточная функция охватываемой части системы корректирующего устройства
Wно – передаточная функция неохватываемой части системы
Передаточная разомкнутой системы по выходной координате будет равна:
Wp=W1·
Wно
Wос
= Wос
Wос
При синтезе параллельно корректирующего устройства делается допущение, что не учитывается 1 в знаменателе.
Wp
=
Ap= ;
Lp(ω)=Lно(ω)
+ Lос(ω
)– Lку(ω);
Lp(ω)=
Lж(ω)
;
Lp(ω)=Lно(ω)
+ Lос(ω
)– Lку(ω);
Lp(ω)=
Lж(ω)
Lку= Lно+ Lос(ω )– Lж;
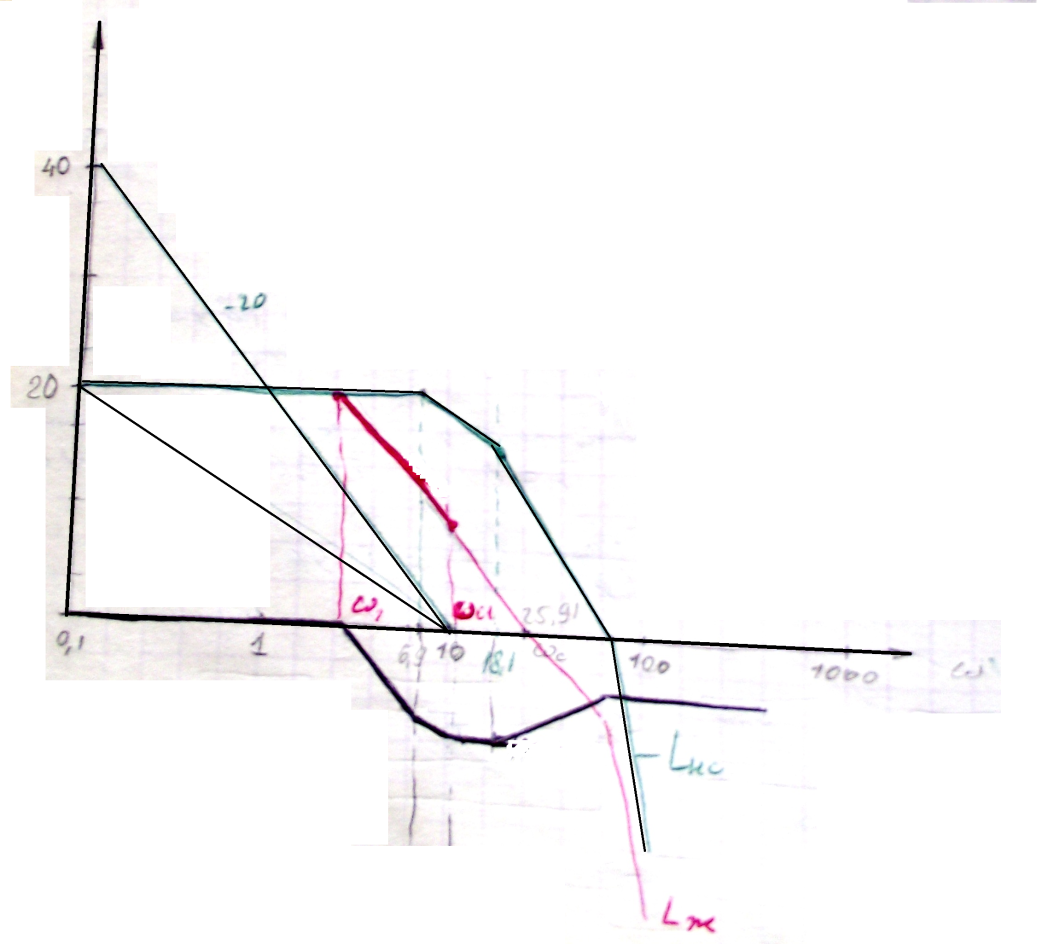
Постоение жедаемых ЛАХ
В средне частотной зоне желаемая ЛАХ имеет наклон -20дб/декаду

ωс1, ωс2- смяшчающие частоты, в низкачастотной области желаемая ЛАХ разомкнута нескоректирокаини систем Lнс. Это делается для того, чтобы КУ не влияло на к-т усиления определяя исходя из задоного диапазона регулирования и статизма характеристик.
Высокочастотная область ЛАХ практически не оказывает влияни на динамические свойсва системы. Поэтому в этой области желаемая ЛАХ строится Т.О., чтобы проще была раализация КУ
Частота ωс определяет быстродейстиве системы (чем> ωс чем выше быстродействие) Привод ωс=50..150 рад/с
Для определения частоты среды в учебниках по ТАУ имеются утвержденные криыве зависимости времени регулирования с переругулирования от Рmax (величина максимального ВЧХ)


Задавшись
 ,
находим Рmax
=1.4 определяем ωс
,
находим Рmax
=1.4 определяем ωс
Зная Рmax по номограммам Солодовникова(Учебник ТАУ) определяем
Lо1 и Lо2 и по ним ωс1 и ωс2
Пример:
Необходимо рассчитать поледовательно корректируещее устройство для ЭП постояного тока
βп
=50
γ=0.2
Т0=0,02с;
T=
0,04c;
ТM=0,2с;
 ;
tp=0,57с
;
tp=0,57с



Ищем
корни



Корни действительны, то есть звено второго порядка можно двумя звеньями первого порядка




 строим ЛАХ всех
звеньев
строим ЛАХ всех
звеньев
Аналитические методы синтеза САУ
Синтез САУ методом анализа корней характерестического уравнения
В общих случаях выходной координате

pi- корни характерестического уравнения

Корни располашаются ближе к Im называются доминирующими полюсами они оказывают болшее влияние на динамические свойства ситемы

Амплитуда решения сi обратно пропрорционально модулю корня ( то есть расст-ю до начало координат )
P1- динамический полюс
 P1=-10;
P1=-2
P1=-10;
P1=-2
P2- доменирующий полюс(состовляющая зутухает в 5 медленее чем от P1 )

A(p)=0.05p2+ 0.6p+1
A’(p)=0.1p +0.6



В ряде сл-яв может ст-ть задача; за счет 1 получить задонное время регулируя tp
Исходное характерестическое уравнение anpn+an-1pn-1 +…+a0 =0
В новой системе координат

an(p-σmin)n+ an-1(p-σmin)n-1+….+a0=0
Зная σmin, из уравнения устойчивости определим необходимые значение параметра системы
Пример: Характерестическое уравнение p3+3p2+4p+β=0
За счет к-та усилия β получить tp=1.5c ; β-?
(p-σmin)3+ 3(p-σmin)2+4(p-σmin)+β=0
p3 -σmin3-3 p2σmin+3pσmin2+ 3p2+3σmin2-6pσmin+4р-4σmin+β=0
а0= β-4σmin+3pσmin2-σmin3>0
β>4σmin-3pσmin2+σmin3

β >4
а3=1
а2=-9σmin+3
а1= 3pσmin2-6σmin+4
(3-3 σmin)( 3pσmin2-6σmin+4)-( β-4σmin+3pσmin2-σmin3)=-3*4 –(β-4)>0 от сюда следует что
-12-β+4>0
Нет таких β, при которых выполняется условие устойчивости(за счет β нельзя получить нужное быстроедействие системы)
Возьмем
tp=6с ; σmin=0.5с
β>1.375
1.5(1.75)-( β-1.375)-2.625- β+1.375>0
β <4
1.375<β <4
Синтез САУ методом параметрической оптимизации
Качество
САУ помимо
 можно оченить ещё по интегральным
показателям
можно оченить ещё по интегральным
показателям


 (34)
(34)

Функция завусит от независимого аргумента, а функция зависит от функции
(х(t)- функция, I((х(t))-функция)
Система более качественная, соответствующая процессу 2 т.к. его быстродействие выше чем у 1
Оценка вида (34) на практике как правило не используется, т.к такая оценка даёт объективную картину только для монотонных процессов.
Интегральная оценка даёт объективную картину только при монотонных процессах, когда перерегулирование отсутствует.

 С
точки зрения критерия (34) система более
качественная, а на самом деле система
1 более качественная т.к в ней меньше
время регулирования. На практике, как
правило, используется интегрально-квадратичный
критерий.
С
точки зрения критерия (34) система более
качественная, а на самом деле система
1 более качественная т.к в ней меньше
время регулирования. На практике, как
правило, используется интегрально-квадратичный
критерий.


 (2)
(2)
В
более общем случае критерий записывается:


 (3)
(3)
Целью синтеза систем методом параметрической оптимизации является нахождение неизвестных параметров систем, обеспечивающих минимум целевых функций вида (3). Величина I называется целевой функцией, критерием оптимизации или функционалом.
Алгоритм синтеза:
1) записывается дифференциальное уравнение в системах n-го порядка для свободного движения

2)
исходное уравнение системы поочерёдно
домножаем на
 ,
, и т.д
и т.д
Получаем систему n уравнений.

3)
интегрируя систему уравнений от нуля
до
 получаем систему уравнений для нахождения
частных функционалов
получаем систему уравнений для нахождения
частных функционалов ,
, ,
,
4)
Искомые параметры находятся из выражения:


 -искомый
параметр
-искомый
параметр
Пример:

Необходимо оптимальное значение кос=α-? При котором целевая функция

стремится к min
Операторное уравнение:



Домножем на x и x

Интегрируем 2 уравнения от 0 до ∞






Находим





Если
принять

В любой системе производная с (n-1) порядка и < будут равны нулю, так как на выходе интегратора сигнал ступенчато изменяться не может




Пример:
Определить α из условия, что
 стремится кmin
то есть I=I1+I2
стремится кmin
то есть I=I1+I2







Колебательность
уменьшалась, так как отношение мнимой
части деуствуещего уменьшилос, но

Недостатки метода:
должна быть известна структура САУ
Нет общей методики нахождения весомых коэффициентов
 при частных функционалах, обеспеч.
заданные динамические с-мы. Известна
только тенденция влияния на переход.
С увеличением весовых коэффициентов
при старших частных функционалах
процесс протекает более полно.
при частных функционалах, обеспеч.
заданные динамические с-мы. Известна
только тенденция влияния на переход.
С увеличением весовых коэффициентов
при старших частных функционалах
процесс протекает более полно.
Синтез САУ с использованием уравнения Рикатти
При наложении ошраничения на уравнение условие функции имеет вид

В теории оптимального управления доказывается, что при оптимизации САУ по интегрально-квадратичным критерием качества, управления – является линейной функцией координаты объекта.

Кос – матрица коэффициентов обратной связи, которую в результате синтеза мы должны определить.
Все коэффициенты матрицы «К», за исключением последней строки, равны «0»:
 ,
так как в реальных объектах можно
непосредственно воздействовать только
на старшую производную объекта.
,
так как в реальных объектах можно
непосредственно воздействовать только
на старшую производную объекта.
В общем виде ограничения могут начинаться не только на корд. но и на управление, т.е. целевая функция выглядит:

Q и R диагональные матрицы
При использовании данного метода поведение системы должно быть представлено в виде уравнения состояния:

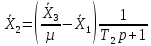
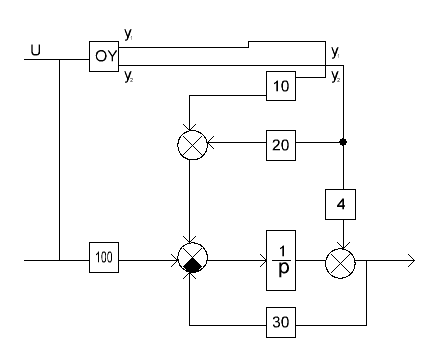
Структурная схема САУ имеет вид:

Так как оптимальные уравнение является линейным, то любая линейная система является оптимальной в интегрально-квадратичной системе качества.
 (35)
(35)

Присоединённая матрица получается путём замены каждого элемента его алгебраическим дополнением с последовательным транспонированием.
Матрица «К» находится из уравнения Рикатти, которое имеет вид:
 (36)
Уравнение Рекатти
(36)
Уравнение Рекатти
Пример: Задана структурная схема объекта и услов функция


Провести синтез САУ с использованием уравнения Рекатти


Запишем уравнения состояния


Пусть



Добавим в схему соответствуюшую связь и имеем уравнение Рекатти:






Зная
 можно определить коофициенты ОС
можно определить коофициенты ОС
Недостатки метода:
Нет общей методики определения коэффициентов матрицы Q и R, исходя из заданных динамических свойств сисемы
Для нахождения неизвестных коэффициентов матрицы «К» необходимо решать систему нелинейных алгебраических уравнений.
Нет общей методики как алгебраического, так и численного решения алгебраических уравнений.
Метод классического вариационного исчисления
Метод классического вариационного исчисления может применяться в 2 вариантах:
1)на основании целевой функции и уравнения ограничения находится оптимальный закон изменения координат объекта.используя другие методы синтеза (метод модального управления) синтезируется управляющее устройство,обеспечивающее оптимальный закон изменения координат объекта.
2)на остновании целеывой функции сразу определяем оптимальное управление.
Пусть функция имеет следующий вид:
 (37)
(37)
Оптимальный закон изменения x(t) находим из уравнения Эйлера:

Целевая функция может зависеть не только от первой производной, но и производной более высшего порядка.

Тогда оптимальный закон находится из уравнения Эйлера-Пуассона

На практике нахождение оптимального закона изменения координаты объекта без учёта ограничений ,наклад. на координаты, не имеет физического смысла.
Например: разгон
двигателя
 =
=
Уравнение ограничения имеет вид:
 0(39)
0(39)
В этом случае составляется уравнение Лагранжа:

Где
 неопределенный множитель Лагранжа
неопределенный множитель Лагранжа
В это случае
уравнение Эйлера будет иметь вид:
случае
уравнение Эйлера будет иметь вид:

На практике уравнение ограничения часто носит интегральный характер:

Такая задача называется изопереметрической
Уравнение ограничений (41) легко сводится к уравнению органичений (39)
Продиффиринцировать (41), получим (39)
Методика решения задачи не отличается от того, какой вид имеет уравнение ((39) или(41))
Пример Оптимальное управление разгонным жлектроприводом
Задача разогнать ЭД от V1 доV2
Возможны 3 варианта постоения задачи
При ограничениях на потери необходимо разогнать ЭД до максимальной возможной скорости

i(t)=? ω(t)=?
Необходимо разогнать ЭД до заданного значения скорости при минимальных потерях
i(t)=? ω(t)=?

Необходимо разогнать ЭД до заданного значения скорости при ограничениях на потери за минимальное время

i(t)=? ω(t)=?
Все три варианта постановки задачи оптимизируют уравнения е являющееся противоречивыми, то есть при решении задачи по всем трем вариантам получим одни и те же значения уравнений i(t) и ω(t)
В дальнейшем будем рассматривать только первый вариант
К уравнениям (42) (43) нельзя сразу применить уравнения Лагранжа, так как в целевой функции (ЦФ) и в уравнении ограничений входят различные переменные (ток и скорость) Поэтому для решения задачи необзодимо ток выразить через скорость или наоборот. Для этого выполняется основное уравнении для электропривода

Если
 ,
то он не является оптимальным значением
измененияω(t),
то есть его можно не учитывать.
,
то он не является оптимальным значением
измененияω(t),
то есть его можно не учитывать.


Уравнение ограничений записывается в следующем виде



Уравнение ЭЛ









То есть оптимально знаком изменяя скорости для разложенного ЭП является линейным законом, а так в процессе пуска const

Можно определить из следующего уравнения (потери)




Меньше потери при изменении по закону 2
Чем быстрее зап-ем тем больше нагрев
Оптимальное управление позиционным электроприводом
Целью функционирования позиционного электропривода является отработка заданного перемещения с необходимой степенью точности. Такие привода находят применение: станки, роботы, манипуляторы и т.д.
Возможны 3 варианта постановки задачи оптимального управления:
При ограничении на потери необходимо отработать максимально возможный угол поворота.


При ограничениях на потери необходимо отработать заданный угол поворота за min время.



Необходимо отработать заданное перемещение за время «T» при минимальных потерях:



Так же как и в предыдущей задачи все три варианта являются противоречивыми, рассмотрим первый вариант











Оптимальным законом
изменения для скорости является
параболический закон, а для тока линейный
закон









Коэффииент λ и время Т можно определить из условия обработки заданного перемещения и ограничения на потери


Зная
 можно определить значения времени
отработки перемещения Т и неопреленного
множителя Лагранжа λ
можно определить значения времени
отработки перемещения Т и неопреленного
множителя Лагранжа λ
Сравнительный анализ законов оптимального управления.
На практиче как правило для позиционного ЭП используют не параболический а линейнфый закон изменнения скорости, реализация которого проще. Простота не является главным аргументом. Рассмотрим, какие возможны потери при использования для позиционного электропривола линейные щаконы изменения скорости вместо
Отбрасывается то же перемещение за 1 и то же время
 соответствует параболическому изменения
скорости, а
соответствует параболическому изменения
скорости, а
 линейному
линейному
.




При
условии
 ,
,

I(t)=kw(t)
 (44)
(44)


Необходимо
выразить
 через
через из условия того, что все те переменные
одинаковы
из условия того, что все те переменные
одинаковы






То есть при использовании не оптимального (не линейного) закона возрастают потерив меди на 33% выше, чем при использовании оптимального закона. Так как процент небольшой (удельный вес позиционныэ приводов небольшой по отношению ко всем приводам и они небольщой мощности 100Вт-1кВт) то на практике используют линейный закон изменения скорости
Экономия энергии для позиционных ЭП не является такой актуальной задачей. Этот праигрым несущественен (33% ). Более существенным является быстродействие. (Так как в конечном итоге именно оно будет определять производительность агрегада или станка с данным ЭП)


 =
=
 =?
=?

 =
=
 =?
=?


Выразим
 через
через из условия, что
из условия, что



 =
= =
= =
= =
= =1.155
=1.155

Время обработки одного и того же перемещения при равных потерях при использовании параболического закона изменения скорости будет на 15% меньше, чем при использ линейного закона. На практике эта цифра меньше




Из за наличия участков с установленной скоростью и пауз между отработками соедененных перемещений
В ряде случаев уравнения ограничений представляет собой уравнение состояний объекта управления, то есть


Исходная ЦФ



Функция Лагранжа имиеет вид



Система
уравнений (45) позволяет определить
опритмальный закон изменения в-ра
состояния объекта
 а так же оптимальное уравнение
а так же оптимальное уравнение
Однако
трудность в решении задачи заключается
в том, то не известно начальное значение
множителя Лагранжа

Правда известны начальное и конечное значения в-ре состояний x(t0)→ x(tк)
Решение задачи производиться следующим образом- принимаем все начальные значения неопределенным множителем Лагранжа и окр-ся конечное состояние x(tк) Но если оно не совпалает с желаемым значением, то необходимо задаваться другими начальными щначениями неопределеного множителя Лагранжа и опять решать задачу.
При определении оптимального уравнения методом классического вараиционного исчисления уравнение вариационной задачи может быть записаны в канонической либо в гамильтановой форме
Пример:
Объект II порядка

Уравнения Эйлера:

Ввведем обозначения
 а вместоF-функцию
Н
а вместоF-функцию
Н

 канонические
переменные, а Н- функция Гамильтона , в
общем ыиле функция Гамельтона
канонические
переменные, а Н- функция Гамильтона , в
общем ыиле функция Гамельтона
 (47)
(47)

из
(47)
 или
или (векторная)
(векторная)
из
(46)


Уравнение (48) является новой математической трактовкой уравнения Эйлера. При наличии ограничений вместо F необходимо использовать функцию L (функцию Лагранжа)


Неопределенный множитель Лагранжа равны каноническим переменным
Функция Гамильтона в этом смысле

Уравнение Эйлера имеет вид(для нахождения оптимального уаравления)

Пример:
Задана структурная схема ОУ (объект управления)

ЦФ:
Найти оптимально управление

Запишем уравнения состояния объекта


Функция Лагранжа имеет вид

Система(49) имеет вид




Матрица М: det(PE-M)=0





Для
дальнейшего решения задачи
 отбросим, так как сисема должна быть
уствойчивой
отбросим, так как сисема должна быть
уствойчивой


Сразу
нельзя определить
 так
как неизвестна
так
как неизвестна

Выразим




Оптимальное управление


Зная
значения К, Т, можно определить
К=2,
Т=0.1




Синтез САУ методом модального управления.
Модальное управление
– управление свободным движением ,а
свободное движение определяет динамические
свойства системы.

Уст или Вых – характеристикасистемы в установленном режиме (определяет статические свойства)
Свободная- характеристика системы в переходных режимах (определяет динамические свойства)
Управление свободной состовляющей можно управлять и изменять динамические характеристики системы
Термин «модальногое управление» происходит от слова «мода»-свободное движение- управление свободным движением
При синтезе САУ методом «МУ» управление является мин функцией координат объекта, такое управление является оптимальным для систем, оптимищируемых по интегрально- квадр. Критериям качества(см. выше Уравнение Рекатти)


Метод модального управления как правило используется для синтеза астатических САУ. (статизм=0)
В статических системах существует определенная связь между статическими и динамическими свойствами. Поэтому получив необходимые динамические свойства системы статические свойства могут оказаться не удовлетворительными.
Что касается систем астатических, в этом случае таких проблем не возникает.
Для
астатических:

Свойства
могут оказываться неудвлетварительными
В астатических системаз свойства,
неоюходисо статические свойста получатся
автоматически- так как при проектировании
систем, необходимо , что бы

Структурная схема системы, синтез методом М.У.:
Метод модального управления- когда объект описывается состоянием или представляется в виде структурной схемы или передаточной функции.
Структурная схема в общем виде имеет след. Вид:

Методика синтеза следующая:
1)на основании структурной схемы 1 и выражения для управления состоянием общую структурную схему системы автоматического управления САУ.
2)на основании структурной схемы запишем передаточную функцию системы:

3)на основании теоремы Виетта можно записать:
 (54)
(54)
Задавшись распределением корней и приравняв коэффициенты при одинаковых степенях уравнения 2 можно составить синтез уравнения для нахождения неизвестных коэффициентов обратной связи.
Динамические свойства системы определяется значениями матрицы М. Согласно т.Виетта можно записать:

 -
собственное значение матрицы М
-
собственное значение матрицы М
Задавшись распределениями собственных значений матрицы М по Баттерварту и приравняв, возможны 2 ситуации :
1)Все координаты объекта измеряемы. В этом случае теоретически можно получить любое быстродействие
2)Не вссе координаты объекта измеряемы, как правило трудно поддается измерению верхняя. В это случае даже теоретически нельзя получить любое быстродействие.
По распределению Беттерворту:

Т.к. система должна быть устойчивой
Модуль корней у всех одинаковый.
Функция распределения корней по Баттерварту имеет след. Вид:

i-порядковый номер собственного значения
n- номер объекта
|
n |
∆,% |
|
|
1 |
0 |
3/H |
|
2 |
4 |
3/H |
|
3 |
8 |
6/H |
|
4 |
11 |
6,8/H |
|
5 |
15 |
7,5/H |


 (50)-уравнение
состояния исходного объекта.
(50)-уравнение
состояния исходного объекта.
При синтезе астатических систем вводится понятие расширенного объекта управления:
 ;
(51)
;
(51)


 (52)
(52)
Уравнения 50 и 52 будут уравнениями для расширенного объекта регулирования
 ,
,



 ,
,



Методика синтеза следующая:
1)на основании структурной схемы 1 и выражения для управления состоянием общую структурную схему системы автоматического управления САУ.
2)на основании структурной схемы запишем передаточную функцию системы:

3)на основании теоремы Виетта можно записать:
 (2)
(2)
Задавшись распределением корней и приравняв коэффициенты при одинаковых степенях уравнения 2 можно составить синтез уравнения для нахождения неизвестных коэффициентов обратной связи.
Это означает, что в реальных системах можно непосредственно воздействовать на старшую производную объекта.
 ,
,

За счет нагрузки скорость никто не регулирует.!!!!
Синтез Наблюдателя
Для получения высоких динамических показателей системы необходимо иметь не только значение входной координаты, но и выходной. Использование операции искусственного дифф. нежелательно, т.к. это приводит к помехозащищенности системы.
x(t)=x0(t)+xn(t); x(t)=A0sinω0t+Ansinωnt; An<<A0, ωn>>ω0
Большой удельный
вес в сигнале управления может сделать
систему неработоспособной. В роде
случаев на практике непосредственное
измерение промежуточных координат
затруднительно и невозможно. Для
измерения вектора состояния объекта
используются наблюдатели или
идентификаторы, позволяющие восстановить
вектор состояния объекта по управлению
и выходной координате без использования
операции искусственного дифференцирования.
 ;
Y=CX
;
Y=CX
Объект является управляемым, если ранг матрицы управляемости равен n, rangNy=n
Объект называется управляемым, если rangNn=n
Ny=[ ;
Nn=[
;
Nn=[
Физически управлять означает то, что изменение управления вызывает изменение вектора состояния объекта (изменение Uвызывает изменение Х).U→Х.
Физически наблюдать означает то, что изменение вектора Х вызывает изменение выходной координаты (выходных координат). U→Х→У
По Uи У восстанавливаем Х.
Наблюдатель, восстанавливающий вектор состояния объекта по управлению и одной выходной координате, называется полным. Порядок такого наблюдателя будет равен порядку объекта. Все наблюдатели делятся на разомкнутые и замкнутые.
Разомкнутые наблюдатели
Уравнения, описывающие поведение наблюдателя




 – измеренное (оценочное) значение
вектора состояния объекта.
– измеренное (оценочное) значение
вектора состояния объекта.
То
есть наблюдатель представляет собой
математическую модель объекта.


Для того, чтобы действительное значение совпадало с измеренным, необходимо выполнение двух условий:
Одинаковые начальные значения (для малоинерционных всегда совпадают);
Коэффициенты матрицы А объекта и матрицы А наблюдателя одинаковы (это очень трудно, так как нельзя точно определить параметры объектов на этапе проектирования и зависит от toC).
На практике разомкнутые наблюдатели находят ограниченное применение, так как они не позволяют точно измерить вектор состояния объекта. Как правило на практике находят применение замкнутые наблюдатели.
Замкнутые наблюдатели
Уравнения, описывающие поведение наблюдателя имеют вид:
 (55)
(55)

Матрица Lбудет определять динамические свойства наблюдателя, поэтому целью синтеза наблюдателя является определение коэффициентов матрицыL,исходя из динамических свойств наблюдателя.
В общем виде матрицы Lимеет вид:
L=
Так как только за счет первого столбца можно получить любые динамические свойства.
Уравнение (55) можно переписать в следующем виде:
 (56)
(56)

Динамические свойства наблюдателя
будут определяться собственными
значениями матрицы М= так какUи У являются
входными воздействиями для наблюдателя.
Коэффициенты матрицыLможно определить методом модального
управления.
так какUи У являются
входными воздействиями для наблюдателя.
Коэффициенты матрицыLможно определить методом модального
управления.
 (57)
(57)
Задавшись собственными значениями pі (например по Баттерворту) и приравняв коэффициенты при одинаковых степенях pравенства (57) можно составить систему уравнений для нахождения неизвестных коэффициентов матрицыL.
Вопрос выбора быстродействия наблюдателя является сложным, так как с одной стороны чем больше быстродействие наблюдателя, тем точнее происходит измерения вектора состояния объекта. С другой стороны высокое быстродействие наблюдателя потребует больших коэффициентов усиления или малых постоянных времени интегрирования, что отрицательно сказывается на помехозащищенности системы.
Быстродействие наблюдателя в несколько раз выше быстродействия системы, которая замыкается через наблюдатель.

Пример:
Определение управляемости
и наблюдательности объекта.

Уравнения состояния:




 В=
В= С=
С= n=2
n=2
Ny=
А∙В= ;
;
Ny= ;
;
rangNyопределяется порядком наибольшего минора ≠0.
 rang Ny=1
rang Ny=1
 rang Ny=2
rang Ny=2
 rangNy>1
rangNy>1
Объект управляем, если
 .
.
Составим матрицу наблюдаемости
Nн=[Ст; АтСт].
Ат= Ст=
Ст=
АтСт= ;Nн=
;Nн= .
.
Пример: синтез полного наблюдателя

 ;
; ;
;
При реализации наблюдателя на ОУ измеряемый сигнал не может превышать 12 В, поэтому Х3 можно измерять только в масштабе.
 ;(Т_ измерять только в масштабе.измеряемый
сигнал не может превышать 12 В, поэтому
зомкнутые и замкнутые.
;(Т_ измерять только в масштабе.измеряемый
сигнал не может превышать 12 В, поэтому
зомкнутые и замкнутые.
ся полным.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;а11=1/Т3;
а23=1/(Т2∙µ1);
а21=а22=1/Т1;
а31=
µ1/
Т1;
а33=1/
Т1;
а12=γ/
Т3;
;а11=1/Т3;
а23=1/(Т2∙µ1);
а21=а22=1/Т1;
а31=
µ1/
Т1;
а33=1/
Т1;
а12=γ/
Т3;
А= ;
В=
;
В=
 ; С=
; С=
Считаем, что объект управляем и наблюдаем:
rang Ny=3 ; rang Nн=3
L=

М= ;
;
 ;
;
Н=6/ ;
;
 Н=60.
Н=60.

=
р3+р2( )+(
)+( )р+((
)р+(( )
) )=
)= ;
;
Находим
 .
.
 :
(
:
( )=
2Н;
)=
2Н;

 )
) =
=

 u+
u+ ;
;

На основании этих уравнений составляем структурную схему:

По структурной строим принципиальную схему:

у4и у6служат для инвертирования сигналов.
 ;
;
Величиной С1,С2,С3 задаются в пределах С = (0,001 … L)µF;
 ;
; 






 ;
;  ;
;






 ;
;
Синтез редуцированного наблюдателя
В ряде случаев на практике помимо выходной координаты могут измеряться и другие координаты объекта. В этом случае для изменения недостающих координат может быть использован редуцированный наблюдатель, причем его порядок будет меньше порядка объекта на число измеренных координат.
Обозначим вектор измеряемых координат Y, а не измеряемых – W.
Х= ; Ставиться задача по управлениюU
и вектору Y
восстановить вектор неизменяемых
координат W.
; Ставиться задача по управлениюU
и вектору Y
восстановить вектор неизменяемых
координат W.
Размерность объекта управления n, вектора изменения координат r.
То есть:
 W=
W= ;
;
Уравнение состояния объекта:
 U;
U;
 =
= U; (58)
U; (58)

Размерность матрицы:




Из уравнения (60) можно записать уравнение состояния наблюдателя:



 (61)
(61)
По уравнению (61) составим структурную схему наблюдателя:
Целью синтеза
наблюдателя является определение
коэффициентов матрицы L
размерностью
 исходя из требуемых динамических свойств
наблюдателя.
исходя из требуемых динамических свойств
наблюдателя.
Представленная структурная схема является физически не реализуемой из-за наличия блока идеального дифференцирования [Р].
Для этого сигнал 1 необходимо перенести через интегратор:
Преобразуем схему:




Динамические свойства наблюдателя будут определяться собственными значениями матрицы F, так как U и Y являются входными воздействиями для наблюдателя.
Пример:
Задана структурная схема объекта
Изменяются х1 и х2. Синтезировать наблюдатель для изменения х3.







Запишем уравнения состояния объекта:
 ;
;
 ;
; ;
;



А= ;
;
 ;
;
А= ;
;

 ;
;
 ;
;
 ;
;
 ;
; ;
;



Так как
 на динамические свойства не влияет, то
можно принять
на динамические свойства не влияет, то
можно принять .
.
Определим


 ;
;







Составим структурную схему наблюдателя:



Порядок редуцирования наблюдателя n-r=1.
 ;
;
 ;
;
 ;
;
 ;
;
Принципиальная
схема:



 ;
;


Задаемся
 .
.
Скорость САУ скоростью ЭД постоянного тока
методом модального управления
Структурная схема САУ:






задающему воздействию.
На динамические свойства по возмущающему воздействию он влияния не оказывает.
 ;
;

При t=0 – команда на пуск.
t=t1 – на торможение.

Система является астатической за счет наличия в канале главной ошибки интегратора (то есть астатического звена). Динамические свойства по изменением выходного напряжения ЗИ.
Идеальной будет
система, у которой
 - скорость будет изменяться по линейному
закону, что возможно только в том случае,
если
- скорость будет изменяться по линейному
закону, что возможно только в том случае,
если ;
;
На практике получить безинерционное звено невозможно.
Для увеличения
качества отработки выходного сигнала
необходимо
 к
безинерционному звену, то есть переходная
характеристика (h(t))
как можно ближе стремится к переходной
характеристике безинерционного звена.
к
безинерционному звену, то есть переходная
характеристика (h(t))
как можно ближе стремится к переходной
характеристике безинерционного звена.
Качество отработки
будет тем выше, чем больше
 .
.

 .
.
Линейный закон изменения скорости является оптимальным.
Цель синтеза – определение к0,к1,к2
Из структурной схемы:
 ;
;
 ;
;
 ;
;

 ;
;
 ;
;

 ;
;

Зададимся распределением корней по Баттерворту:



Корни комплексно сопряженные.









Приравниваем коэффициенты при одинаковых степенях и находим коэффициенты обратной связи.

Быстродействие
определяется
 .
.



Для получения любого быстродействия необходимо ввести обратную связь по напряжению.
Но на практике она как правило не используется, что объясняется тем, что напряжение при использовании переходных процессов преобразователей носит дискретный характер (его необходимо сгладить через фильтр).
При использовании
фильтра в канале обратной связи по
напряжению повышается порядок системы
(n=5).
Нельзя получить любое отношение
 .
То есть нельзя получить любое
быстродействие.
.
То есть нельзя получить любое
быстродействие.
Быстродействие можно повысить используя наблюдатель.
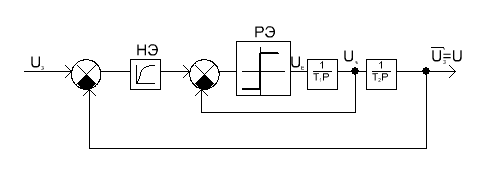
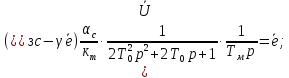
Структурная схема и принцип действия ЗИ
Структурная схема имеет вид:
 \
\

В момент t1 сигнал на входе РЭ равен 0,что приводит к неустойчивой работе РЭ – к возмущению автоколебательного режима. В момент t2 сигнал на входе РЭ становится меньше 0, так как Uз=0. Амплитуда пульсаций пилообразного сигнала ~ 1…10 В.
Чем больше f1, тем меньше А.
Чем ближе РЭ стремится к идеальному, тем больше f автоколебаний. Кроме того, РЭ обладает инерционностью.
Тф
рассчитывается из условия высокочастотных
пульсаций. Чем больше Тф,
тем выше степень ослабления. Для того,
чтобы не искажался
 необходимо
необходимо что
легко выполняется.
что
легко выполняется.
Расчет Тф:


w – угловая частота высокочастотных колебаний.


 ;
;


Исходя из времени пуска рассчитываем постоянную времени интегратора:



Если в качестве
РЭ используется ОУ, не охватывающий
обратную связь, то можно принять
 ;
;

Если
требуется получить различный наклон
сигнала
 при пуске и торможении, это может быть
достигнуто засчет использования
несимметричных РЭ или засчет использования
неодинаковых постоянных интегрирования
на разную полярность входного сигнала.
при пуске и торможении, это может быть
достигнуто засчет использования
несимметричных РЭ или засчет использования
неодинаковых постоянных интегрирования
на разную полярность входного сигнала.



 ;
;
 ;
;
Расчет динамических характеристик САУ по заданию



Так как Uз изменяется ступенчато:

Расчет переходного
процесса
 :
:


Из (62) :





Ток повторит форму
ЭДС с коэффициентом
 .
.
Принципиальная схема реализации управляющего устройства

В качестве датчика скорости используем ТГ (тахогенератор).
Датчик тока состоит из шунта Rш и усилителя.
Uш малое, чтобы были небольшими потери и его необходимо усиливать. Развязка необходима, чтобы СУ не была связана с силовой.
СУПР – система управления преобразователем.
Y6
выполняет
функции инвертора

Uу находится в пределах 10 В.
С выхода усилителя при Uп=15 В сигнал 12 В(с УУ).

Если меньше 10,то не получим полный диапазон регулирования скорости.


 ;
;

Задаемся


На УЧ реализуется интегратор с коэффициентом к0.

Синтез САУ скоростью ЭД постоянного тока методом модального управления с улучшенными динамическими показателями.
Структурная схема такой системы:

На первый взгляд
такая система кажется физически
нереализуемой из-за наличия звена
идеального дифференцирования

Однако при
практической реализации схемы нет
необходимости для получения сигнала,
пропорционального производной от
 ,
использовать дифференцированные звенья.
,
использовать дифференцированные звенья.
Эту информацию
можно получить из самого ЗИ – снять с
РЭ. Сигнал с выхода РЭ
 производной выходного сигнала ЗИ.
производной выходного сигнала ЗИ.
Из данной структурной схемы:
 ;
;

Выражения
для коэффициентов аі
такие же как и для предыдущей системы,
то есть характеристическое уравнение
такое же как и для обычной системы.
Коэффициенты
 находятся по тем же самым формулам.
находятся по тем же самым формулам.
Дополнительно
необходимо определить коэффициенты
 .
.
Разделим числитель
и знаменатель на а1
и вынесем
 :
:

Из последнего
выражения видно, что соответствующим
выбором
 можно компенсировать пару комплексно
сопряженных корней, то есть
можно компенсировать пару комплексно
сопряженных корней, то есть и
и .
.
Для увеличения
быстродействия системы необходимо
компенсировать полюса



 –быстродействие
увеличится в
–быстродействие
увеличится в
 .
.
Определим отношение
 .
.

 ;
;

Структурная схема и расчет ЗИ для позиционной САУ





Отработка большого перемещения
При подаче
 входим в зону насыщения.
входим в зону насыщения.
В момент
t1,соответствующий
времени пуска ЭД, сигнал
 становится
равным
становится
равным
 :
:

На входе РЭ сигнал будет равен 0. РЭ переходит в неустойчивый автоколебательный режим работы.

В момент t2,
когда оставшийся путь равен тормозному
сигнал
 , будет
, будет
То есть
НЭ в момент t2
выходит из зоны насыщения.
 то есть сигнал на входе РЭ будет
то есть сигнал на входе РЭ будет
 0.
0.
Расчет постоянных времени Т1 и Т2.
 ;
;

Задавшись
 и зная
и зная
 находим
находим



Коэффициент усиления НЭ:
Торможение:

 ;
;
Позиционная САУ с переменной структурой

 ;
;


Приравняем коэффициенты при одинаковых степенях р.






Для увеличения
быстродействия системы (более качественной
отработки выходного сигнала ЗИ) на вход
САУ вводятся производные от выходного
сигнала ЗИ с коэффициентами

Условие компенсации полюсов записывается следующим образом:







Задача.
Определить устойчивость.



Т=0,1 с.
Т1=0,1 с.
Т2=0,2 с.
Т3=0,3 с.

Принципиальная схема реализации управляющего устройства.



Основные элементы по прежней схеме.
 инерционные
звенья для сглаживания ВЧ пульсаций
напряжения с выхода РЭ.
инерционные
звенья для сглаживания ВЧ пульсаций
напряжения с выхода РЭ.
Синтез САУ скоростью ЭД постоянного тока методом последовательной оптимизации контуров
Находит широкое применение.
Основан на ряде допущений.
Основное допущение: при синтезе одного контура не учитываются действия остальных контуров. Синтез всегда начинается с внутреннего контура. Метод является менее точным по сравнению с методом модального управления. Несмотря на это в настоящее как правило серийные ЭП выполняют с системой подчиненного регулирования (методом последовательной оптимизации контуров - синтез). Причины: 1)историческая – метод оптимизации контуров был разработан раньше метода модального управления; 2)Система, построенная по принципу последовательной оптимизации контуров, является более удобной в наладке, чем система, построенная по методу модального управления; 3)В системе последовательной оптимизации контуров легко ограничить координаты объекта управления (например, тока).
Структурная схема системы оптимизации скорости имеет вид:

ЗИ на входе системы выполняет те же функции, что и данная система, синтезированная методом модального управления. Система регулирования трехконтурная.
І – контур регулирования тока.
Wрт – ПФ регулятора тока;
кт
– коэффициент обратной связи по току
 ;
;
II – статический контур регулирования скорости.
Wрсс – ПФ регулятора скорости статического контура.
 коэффициент обратной связи по ЭДС.
коэффициент обратной связи по ЭДС.
III – астатический контур регулятора скорости
Wрса – ПФ регулятора скорости астатического.
Uзт – напряжение задания для контура тока.
Uзс – напряжение задания для статического контура скорости.
Вся система является астатической, то есть в установившемся режиме.



В результате
синтеза должны быть определены постоянные
времени интегратора Тт,

Синтез начинаем с контура тока.
Синтез контура тока
Допущения:
Не учитывается действие остальных контуров (статических и астатических контуров скорости);
Не учитывается внутренние ООС по ЭДС ЭД.
С учетом допущений структурная схема контура тока.

За счет регулирования тока происходит компенсация электромагнитной постоянной времени.
Найдем ПФ:



Примем р1,2,
соответствующие техническому оптимуму



Отсюда:
 ;
; 




Синтез статического контура скорости
Без учета астатического контура структурная схема статического контура скорости:

С учетом (63):

При синтезе делается допущение, заключающееся в том, что не учитывает коэффициент при старшей степени р.











Синтез астатического контура скорости














Принципиальная схема реализации управляющего устройства
 ;
ПИ-регулятор (пропорционально-интегральный)
;
ПИ-регулятор (пропорционально-интегральный)
 :
:






Регулятор тока реализует не УЗ, а статические и астатические регуляторы скорости соответственноУ2 и У1.
У4 служит для инвертирования сигнала.


Для того, чтобы система нормально функционировала (то есть можно было получить полный диапазон регулирования скорости независимо от нагрузки необходимой, чтобы сигнал на выходе усилителя не больше 12 В).



 может быть больше
или меньше
может быть больше
или меньше
 ,
что необходимо учитывать при расчете
,
что необходимо учитывать при расчете (если
(если );
);

Так
как У4 – инвертор, то
 .
.
Потенциометр
 служит для задания ограничения по току.
В нижнем положении
служит для задания ограничения по току.
В нижнем положении
Системы управления положением рабочего органа
Выходная координата – угол поворота или линейное перемещение.
Все системы управления положением РО можно разделить на позиционные и следящие.
Они применяются в роботах-манипуляторах, станках, ЧПУ, военной технике.
Следящая САУ
Качество следящих систем как правило определяю на линейный или гармонический входной сигнал.
При линейном сигнале в квазиустановленном состоянии следящая система характеризуется показателем, который называется добротностью следящей САУ.
Системы по скорости Dω

 3(t)-
задающий сигнал
3(t)-
задающий сигнал
ω3(t)=
δ- ошибки по углу
В реальной системе мгновенно скорость не изменяется (есть момент инерции, ток не может мгновенно изменяться из-за наличия индуктивности ).
ω(t1)=ω3
Dω
=

Чем большеDω, тем более качественной является следящая система. При Dω=∞ , δ =0.
Без перерегулирования по скорости добиться Dω=∞ невозможно.

δ= 3(t)-
3(t)- (t)
(t)
Если S1=S2, то Dω=∞. (δ =0).
δ= .
.
Расчет коэффициентов усиления системы исходя из заданного значение Dω.
Структурная схема нескорректированной следящей САУ имеет вид :

 - угловая скорость
ЭД. С0–постоянная
двигателя.
- угловая скорость
ЭД. С0–постоянная
двигателя.
p =ω – угловая скорость рабочего органа
=ω – угловая скорость рабочего органа
I – передаточное число редуктора
Kn – коэффициент по положению
Исходя из заданного Dω необходимо определитьβy (коэффициент усиления)

Uj=kn 3. В
установившемся режиме p=0.
(для систем стабилизации)
3. В
установившемся режиме p=0.
(для систем стабилизации)
pr =0; r≥2.
=0; r≥2.

 .
.
В
квазиустойчивом режиме ω=ω3.

 .
.

Недостаток
– для получения большого значения
 необходим большой
необходим большой .
(при
.
(при ,
, ).
).
На практике такие системы применяются ограничено.
Более широко применяются комбинированные следящие САУ.
Структурная схема комбинированной следящей САУ
Для нее характерно наличие положительных ОС по возмущению на входе.
В
данной схеме возмущающим является
ступенчатый характер суммирования (линейной
зависимости изменения
(линейной
зависимости изменения ).
).



За
счёт
 значение
значение не зависит от коэффициента усиления
системы.
не зависит от коэффициента усиления
системы.
При
 =∞,
=∞,
Синтез следящих САУ методом последовательной оптимизации контуров.
Структурная схема системы:

Wpn – ПФ статического регулятора положения.
Регулятор тока, статический и астатический регуляторы скорости рассчитываются по тем же формулам, что и для системы уравнения скоростью.
Дополнительно необходимо посчитать ФП (определить кр)
Контур положения:

Wpn-ПФ астат. Контура регулятор скорости.

Из структурной схемы контура положения
 (6.5)
(6.5)

Пренебрегаем коэффициентом при старшей степени p


Корни
соответствующие техническому оптимуму








При синтезе методом медального управления

То есть быстродействие системы, построенной методом модального управления выше системы, созданной методом последовательной оптимизации контуров.
Метод оптимизации более грубый, но удобен в наладке.
Налаживается внутренний контур (контур тока): на вход РТ подаётся стук сигнал, возбуждение момента откл. Двигатель в разнос не идет так как имеется Мс. Подбирая две постоянные времени РТ добиваются, чтобы ток стремился к прямоугольной форме.
Затем на вход РТ включается РС, откл. РСА, вкл. Возбуждение и с потенциометра подаётся небольшой ступенчатый сигнал и иссп.. РСС. (из условия чтобы скорость (е) стремилась к прямоугольной форме) и т.д.
Затем РСА и РП.
В регуляторе (за искл. РТ) необходимо изменить один параметр.
Метод модального управления даже для системы уравнения скоростью необходимо сразу изменять три параметра к0,к1,к2
После
определения к0
необходимо определить
 исходя из получения заданного значения
добротности
исходя из получения заданного значения
добротности
В квазиустойчивом режиме из (65):





Блок-схема УУ следящей САУ
Три вида реализации: цифровой, аналоговый, цифро-аналоговый.
В настоящее время в станках ЧПУ используется ЦА вариант.

СС – схема синхронизации – исключает одновременную подачу импульсов на вход сложения и вычитания РСЧ (реверсивного счетчика),так как при одновременном подсчете происходит переполнение РСЧ.
Импульсы, подаваемые с выхода интерполятора В и Н.
Их число ~ перемещению, а частота – скорости, при которой происходит отработка перемещения.
ПЧН – преобразователь частота-напряжение.
ФИД – фотоимпульсный датчик положения, устанавливаемый на валу ЭД или РО.
С выхода ЦАП сигнал может быть как положительным, так и отрицательным, для этого в счетчик заносится какое-либо число импульсов. Этому числу импульсов на выходе соответствует сигнал 0.
ПЧН строится по разным параметрам.
ПЧН – преобразователь частота-напряжение.

ОВ – одновибратор (служит для получения импульса, калибровки по длительности и амплитуде).
Ф – фильтр (служит для выделения постоянной составляющей).
При
малой скорости для выделения средней
составляющей сигнала потребуется
большая постоянная времени фильтра

Такой преобразователь на низких частотах обладает большой инерционностью.
Другой метод

Число импульсов за период обратно пропорционален частоте входных импульсов.
Недостаток – низкая точность при высокой частоте входных импульсов.
ПФ
ПЧН

На практике используется комбинированный метод.
Синтез позиционных САУ методом последовательной оптимизации контуров
Структурная схема системы имеет такой же вид, как для следящей системы. Причем регулятор тока, статический и астатический регуляторы скорости рассчитываются по тем же формулам, что и для следящей системы.
Отличие от следящей системы заключается в регуляторе положения, для которого регулятор положения линейный, то есть крп=const. Если принять для позиционной системы РП линейным и рассчитать крп из условия отработки малых перемещений, то большие перемещения будут отрабатываться с перерегулированием.
Малое перемещение – ЭД не выходит на участок установившейся скорости перемещения. Тахограмма имеет треугольный вид.
Большое – ЭД выходит на участок установившейся скорости перемещения.
Малое перемещение не допускает перерегулирования. Если рассчитывать крп с большим перемещением, то торможение будет происходить с дотягиванием (то есть торможение будет начинаться раньше).
Наличие участка дотягивания приводит к увеличению времени отработки (к снижению производительности установки).
Определим вид криволинейности:
Контур положения

В момент начла торможения сигнал на входе РП изменить знак.



Если
принять, что скорость при торможении
изменяется по линейному закону, то
 ;tT
– время
торможения;
;tT
– время
торможения;


 ;
;



 должен меняться
в зависимости от
должен меняться
в зависимости от
 (РП нелинейный).
(РП нелинейный).

Сигнал
задания на входе РСА

РП может быть реализован путем кусочно-линейной аппроксимации.
Принципиальная схема РП.



При
дальнейшем повышении входного сигнала,
когда
 открывается Д1 и
открывается Д1 и ОУ
уменьшится, так как в ОС будут
ОУ
уменьшится, так как в ОС будут включены параллельно.
включены параллельно.
При дальнейшем увеличении выходного напряжения Д2 откроется и ОС закорачивается.
Условие:

Синтез позиционной САУ методом модального управления
Структурная схема системы:

 ПФ ЗИ (служит для
формирования требуемых динамических
характеристик по задающему возбуждению).
ПФ ЗИ (служит для
формирования требуемых динамических
характеристик по задающему возбуждению).
Положительные
сигналы по производной от
 с коэффициентами
с коэффициентами служат для увеличения быстродействия
системы (для более качественной отработки
выходного сигнала ЗИ).
служат для увеличения быстродействия
системы (для более качественной отработки
выходного сигнала ЗИ).









На основании теоремы Виетта:
 ;
;

Приравняем коэффициенты при одинаковых степенях р:




По
этим же формулам находятся коэффициенты
ОС и для следящей САУ. Для увеличения
быстродействия системы (более качественной
отработки сигнала) с выхода ЗИ на вход
системы вводятся производные выходного
сигнала с коэффициентами
 Они рассчитываются из условия компенсации
полюсов ПФ, расположенных ближе к мнимой
осиІм.
Условие компенсации полюсов записывается
следующим образом:
Они рассчитываются из условия компенсации
полюсов ПФ, расположенных ближе к мнимой
осиІм.
Условие компенсации полюсов записывается
следующим образом:








Определим,
насколько увеличится быстродействие
при компенсации полюсов





Структурная схема и расчет ЗИ для позиционных САУ




Если

 ;
;
Если



НЭ служит для того, чтобы большие перемещения отрабатывались без перерегулирования, а малые – без дотягивания. Рассмотрим отработку большого перемещения:
При подаче задающего сигнала Uз, соответствующего большим перемещениям, НЭ входит в зону насыщения. В момент времени t1, соответствующее времени пуска ЭД, сигнал Uω становится равным сигналу Uм.
Uω(t1)=
Uм;
Uω( )=Uм;
)=Uм;
На
входе РЭ будет сигнал равный 0. РЭ
переходит в неустойчивый автоколебательный
режим работы. В момент t2,
когда оставшийся путь равен тормозному,
сигнал
 .
НЭ в течениеt2
выходит из
зоны насыщения
.
НЭ в течениеt2
выходит из
зоны насыщения
 .
Сигнал на выходе РЭ станет отрицательным.
.
Сигнал на выходе РЭ станет отрицательным.





Определим коэффициент усиления НЭ.
Торможение
начинается при


Позиционная САУ с переменной структурой
СУС – система управления скоростью ЭД;
ДП – датчик положения;
РП – регулятор положения;
ЗИ – задатчик интенсивности СУС;
ДС – датчик скорости;
РЭ 1,2 – релейные элементы;
РЭ
2 имеет зону нечувствительности
 .
.


При ступенчатом
задании
 ,
так как скорость вначале равна 0, сигнал
с выхода сумматора
,
так как скорость вначале равна 0, сигнал
с выхода сумматора
 будет положительным. Положительным
будет и
будет положительным. Положительным
будет и .
Это приводит к замыканию
.
Это приводит к замыканию .
. разомкнут ― система замкнута по скорости
и разомкнута по положению.
разомкнут ― система замкнута по скорости
и разомкнута по положению.
В момент
 ,
когда оставшийся путь равен тормозному,
сигнал с выхода
,
когда оставшийся путь равен тормозному,
сигнал с выхода превышает сигнал с выхода
превышает сигнал с выхода ,
на выходе
,
на выходе сигнал станет равен нулю. Это вызовет
размыкание
сигнал станет равен нулю. Это вызовет
размыкание .
. начнёт уменьшаться по линейному закону
скорости. В момент времени
начнёт уменьшаться по линейному закону
скорости. В момент времени сигнал на выходе сумматора
сигнал на выходе сумматора станет меньше зоны нечувствительности
станет меньше зоны нечувствительности .
Это приведет к размыканию
.
Это приведет к размыканию и замыканию
и замыканию .
Система станет замкнута по положению
и происходит отработка положения.
.
Система станет замкнута по положению
и происходит отработка положения.
Сначала синтезируем
только САУ скоростью, а затем
экспериментально подбираем
 .
Эта система удобна в наладке.
.
Эта система удобна в наладке.
ДИСКРЕТНЫЕ САУ
Наряду с непрерывным способом перелечи сигнала, существует дискретный способ. Дискретизация состоит в замене непрерывного сигнала теми или иными дискретными значениями. Дискретизация может быть проведена по времени, по уровню и одновременно. То есть существует квантование сигнала по времени, по уровню и комбинированная.
Квантование по времени
Квантование по
времени заключается в замене непрерывного
сигнала дискретными значениями в заранее
фиксированные моменты времени.
 ―непрерывная
функция
―непрерывная
функция
 ―дискретная
функция
―дискретная
функция
 ―период квантования
―период квантования
При таком квантовании
непрерывный сигнал заменяется решётчатым.
Чем меньше
 ,
тем точнее дискретный сигнал соответствует
непрерывному.
,
тем точнее дискретный сигнал соответствует
непрерывному.
Для передачи информации без искажения, согласно теореме Котельникова, необходимо выполнение условия:

 ―частота квантования
―частота квантования
 ―частотак одной
гармоники непрерывного сигнала
―частотак одной
гармоники непрерывного сигнала
Квантование по уровню
Квантование по
уровню заключается в том, что сигнал
может принимать значение, соответствующее
только разрешённым уровнем и изменяется
только в разрешённые моменты времени.
Шаг квантования по времени ― величина постоянная.
Комбинированное квантование
Комбинированное
квантование заключается в том, что
дискретный сигнал может принимать
только значения, соответствующие
разрешённым уровням и изменяется только
в разрешённые моменты времени.
В зависимости от вида квантования все дискретные системы делятся на: импульсные (хотя бы один из сигналов квантуется по времени), релейные (по уровню), цифровые (по времени и по уровню).
Блок-схема
цифровой САУ
В АЦП происходит квантование по времени и по уровню.
При большом числе разрядов АЦП и ЦВУ можно пренебречь квантованием по уровню и тогда цифровую САУ можно рассматривать как импульсную. Так как цифровая САУ является нелинейной дискретной САУ из-за квантования по уровню, а импульсная ― линейная САУ. Преобразование непрерывного сигнала в дискретный, осуществляется импульсным элементом (ИЭ).
ИЭ преобразует
непрерывный сигнал в последовательность
импульсов определённой формы.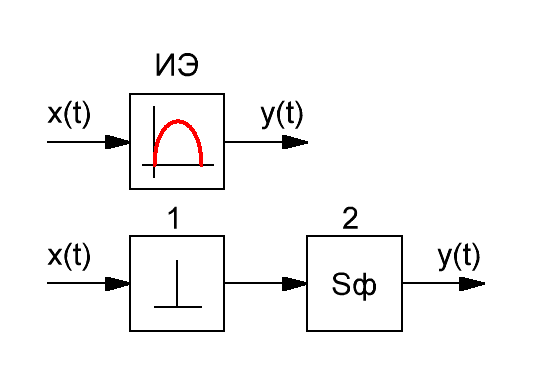
ИЭ можно представить двумя элементами:
1. Простейший импульсный элемент
2. Преобразователь
Простейший импульсный элемент преобразует непрерывный сигнал в решётчатый. А формирователь преобразует решётчатый сигнал в импульсы прямоугольной формы.

Формирователь может осуществлять ШИМ и АИМ. Ширина импульса определяет непрерывность сигнала в момент квантования по времени. Системы ШИМ относится к нелинейной САУ.
Дискретные преобразования Лапласа


― непрерывное преобразование
― дискретное преобразование, где m ― номер шага квантования
Соотношение (2) устанавливает связь между решётчатым сигналом и его изображением и называется дискретным преобразованием Лапласа (D).

 ―начальное
значение непрерывного сигнала
―начальное
значение непрерывного сигнала
 ―частота квантования
сигнала
―частота квантования
сигнала
Соотношение (3) устанавливает связь между изображением непрерывного сигнала и дискретного сигнала и называется D-преобразованием.


Формула (3) неудобна, рассмотрим пример использования формулы (2).



Из рассмотренного
примера видно, что изображение непрерывного
сигнала зависит от
 ,
а изображение решётчатого сигнала от
,
а изображение решётчатого сигнала от .
.

В ТАУ помимо D-преобразование используют ещё и Z-преобразование. Переход от D-преобразование к Z-преобразованию производят по следующей формуле:


Основные свойства дискретного преобразования Лапласа
1. Постоянный коэффициент можно выносить за знак D-преобразования:

2. D-преобразование суммы равно сумме D-преобразований:

3. D-преобразование произведения не равно произведению D-преобразований:

Они совпадают со свойствами непрерывного преобразования Лапласа
4. Изображение дискретного сигнала можно выносить за знак преобразования

5.
 можно выносить за
знак преобразования
можно выносить за
знак преобразования

Таблица переходов от непрерывного преобразования к дискретному
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
















Передаточные функции импульсных автоматических систем (ИАС). Передаточная функция одноконтурной импульсной САУ
Структурная схема:

Простейший
импульсный элемент нельзя описать
передаточной функцией, так как на входе
― изображение непрерывного сигнала
 ,
а на выходе ― дискретный сигнал
,
а на выходе ― дискретный сигнал .
.


 ―передаточная
функция непрерывной части системы
―передаточная
функция непрерывной части системы
Формирователь можно отнести к непрерывной части системы, но из-за (4) и (5) нельзя определить передаточную функцию импульсной системы, так как входят изображения непрерывных и дискретных сигналов.
Подвергнем (4) и (5) D-преобразованию:




Связь между передаточной функцией импульсной разомкнутой и замкнутой систем такая же, как для непрерывной САУ.
Передаточная функция импульсной двух контурной САУ

Для непрерывной:
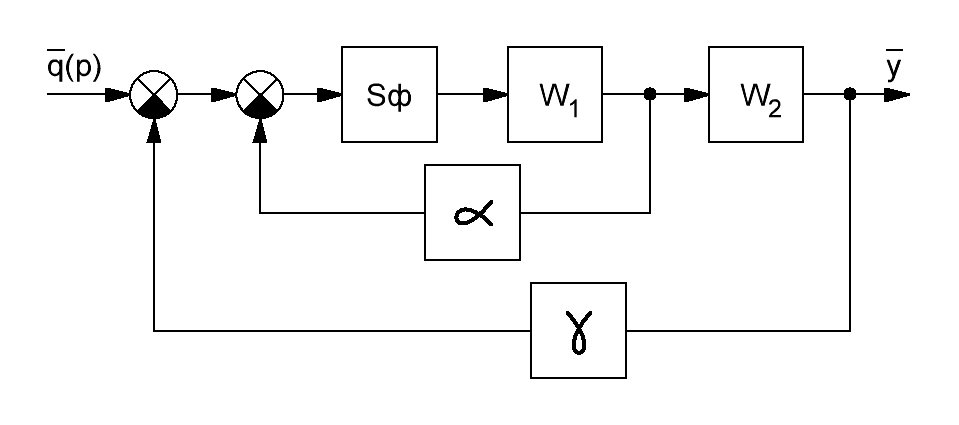



Для дискретной:



Подвергнем эти три уравнения дискретному преобразованию Лапласа:

Исключаем
 :
:




Переход от непрерывного изображения к дискретному

1. Если формирователь прямоугольный:


Для нулевого корня составляющая решения имеет вид:

Раскрываем по
Лопиталю неопределённость
 :
:


2. Разложение исходной передаточной функции на сумму простейших слагаемых. Используем правило D-преобразования и таблицу свойств.
Пример

Формирователь прямоугольный.
1. Первый метод
Используем формулу (6):




2. Второй метод







Получили одинаковый ответ.
Устойчивость импульсных САУ
По аналогии с непрерывной системой, импульсная система является устойчивой, если реакция на ограниченное входное воздействие также ограниченно.
Корни характеристического уравнения с отрицательной вещественной частью, то есть корни находятся в левой части комплексной плоскости.
Характеристическое уравнение импульсной системы имеет вид:

Критерий Рауса ― Грувица использовать нельзя. При использовании Z-преобразования характеристическое уравнение (8) примет вид:


Условие устойчивости:





Импульсная система будет устойчива, если все корни характеристического уравнения по модулю будет меньше единицы:

Критериями устойчивости для непрерывной системы нельзя пользоваться, так как вид характеристического уравнения (9) так же не совпадает по условиям устойчивости.
В ТАУ помимо D- и Z-преобразований используется W-преобразование. Переход от Z-преобразования к W-преобразованию осуществляется по формуле:


Подставим в выражение (9) W:


При использовании W-преобразования можно пользоваться критерием устойчивости Рауса ― Гурвица для непрерывной системы, так как в этом случае условие устойчивости и вид характеристического уравнения совпадают.
Алгебраический критерий устойчивости для непрерывной системы называют критерием Шур ― Кона.
Условие устойчивости:
Система будет устойчива, если все коэффициенты характеристического уравнения положительны, а также положительны все угловые миноры матрицы Гурвицы.


Определим условие устойчивости для импульсной системы первого и второго порядков.
1.







Наличие импульсного элемента уменьшает устойчивость системы (непрерывные системы первого и второго порядков всегда устойчивы).
2.






Пример:


 ―период квантования
―период квантования
Определить критерий
устойчивости и как влияет
 на устойчивость САУ.
на устойчивость САУ.
Чем меньше
 ,
тем ближе система к непрерывной ―
устойчивость улучшается.
,
тем ближе система к непрерывной ―
устойчивость улучшается.






Система неустойчива.
Определим
устойчивость системы для
 .
.


Система устойчива.


Частотный критерий устойчивости Найквиста для импульсной САУ
Замкнутая система
устойчива, если устойчива разомкнутая
и её АФЧХ при изменении
 от
от до
до не охватывает точку
не охватывает точку .
.
Замкнутая импульсная
система устойчива, если устойчива
разомкнутая и её АФЧХ при изменении
 от
от до
до не охватывает точку
не охватывает точку .
.
 ―частота квантования
―частота квантования
При использовании W преобразования:

 ―псевдочастота
―псевдочастота
Критерий Найквиста для непрерывной импульсной системы формулируется одинаково.




Пример:
Определить устойчивость импульсной САУ с использованием критерия Найквиста.





Для устойчивости определим точки пересечения АФЧХ с осью абсцисс:



То есть импульсная система неустойчива.
Пример:
Для предыдущего примера используя W-преобразование.








Система неустойчива
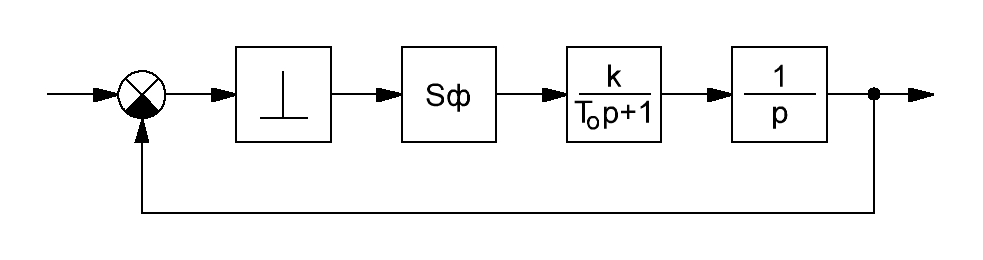
Синтез импульсных САУ методом модального управления
В настоящее время всё более широко при построении САУ используют микроЭВМ. Пренебрегая квантованием по уровню, что возможно при большой разрядности ЭВМ, цифровую систему можно рассматривать как импульсную.
В общем виде структурная схема цифровой САУ:

ЦУУ ― цифровое управляющее устройство
Сигнал с выхода ЦАП может изменяться только ступенчато, причем внутри цикла обработки информационный сигнал не изменяется.
Цикл обработки информации в ТАУ зависит от быстродействия ЭВМ и количества и сложности операций, выполняемые ЦУУ.
Для непрерывной системы:


Приближённое состояние определяется по формуле (23):


Из-за наличия
инерционности, управление на
 интервале:
интервале:


Для получения нужных динамических характеристик движение системы должно соответствовать эталонному:

 ―закон изменения
эталонного движения
―закон изменения
эталонного движения
Динамические
свойства системы будут определяться
собственными значениями матрицы
 .
С учётом того, что движение системы
должно соответствовать эталонному,
уравнение (13) запишем следующим образом:
.
С учётом того, что движение системы
должно соответствовать эталонному,
уравнение (13) запишем следующим образом:





По формуле (15) определяют коэффициент обратной связи.
При скалярном
управлении все коэффициенты матрицы
 ,
исключением последней строки, равны
нулю:
,
исключением последней строки, равны
нулю:

При скалярном управлении непосредственно можно воздействовать только на старшую производную объекта.
Коэффициенты
матрицы
 будут определяться собственными
значениями матрицы
будут определяться собственными
значениями матрицы и следовательно, динамические свойства
системы. Причём значения матрицы
и следовательно, динамические свойства
системы. Причём значения матрицы отличаются от
отличаются от только последней строкой:
только последней строкой:


Так же как и при синтезе непрерывной САУ здесь возможны две ситуации:
1. Все координаты ОУ измеряемы, можно получить любое быстродействие системы
2. Не все координаты ОУ измеряемы, получить любое быстродействие нельзя
Алгоритм синтеза ЦУУ при полностью измеряемом векторе объекта
1. Определяем
неизвестные коэффициенты матрицы
 исходя из требуемых оптимальных свойств
системы (
исходя из требуемых оптимальных свойств
системы ( ):
):

Задавшись
распределением корней по Баттерворту
и приравняв коэффициенты при одинаковых
степенях
 равенства (17), можно составить систему
уравнений для нахождения неизвестных
коэффициентов матрицы
равенства (17), можно составить систему
уравнений для нахождения неизвестных
коэффициентов матрицы .
.
2. Записываем
матрицы
 ,
, и
и .
.
3. На основании уравнения (15) определяем неизвестные коэффициенты обратной связи.
При скалярном управлении уравнение (15) имеет вид:

Пример:

 измеряемы,
измеряемы,
 ,
, ,
, ,
, ,
, ,
,
Уравнения состояния:



Для того, чтобы
система была астатической, по аналогии
с непрерывной системой вводят
 :
:
























Синтез САУ при не полностью измеряемых координатах объекта
Отличие заключается
в том, что нельзя получить любое значение
 (или
(или .
. определяется из условия:
определяется из условия:

 ―номер неизмеряемой
координаты
―номер неизмеряемой
координаты

Нельзя определить
сразу коэффициенты
 ,
, ,
, .
Их выражают через
.
Их выражают через :
:

Неизмеряемая
 ,
то есть
,
то есть .
.


Синтез последовательного цифрового корректирующего устройства
Структурная схема системы имеет вид:

Дискретное корректирующее устройство должно работать синхронно с импульсным элементом. Переходная функция разомкнутой системы:

Согласно свойству (4) дискретного преобразованию Лапласа:

 ―желаемая
передаточная функция,
―желаемая
передаточная функция,
 ― дискретная передаточная функция
разомкнутой системы
― дискретная передаточная функция
разомкнутой системы
Отсюда:


Пример:

 ,
,
 ,
, ,
,
Непрерывная система:


Замкнутая система:



Система неустойчива. Берём:

За счёт
 и
и можно получить необходимые динамические
свойства (
можно получить необходимые динамические
свойства ( ,
, )
)


Система устойчива.
Алгоритм реализации дискретного корректирующего устройства на ЭВМ

Для дискретных
систем (как и для непрерывных) существует
принцип физической реализации,
заключающийся в том, чтобы порядок
числителя не превышал порядок знаменателя
 .
.

Числитель и
знаменатель домножим на
 :
:



 ―звено запаздывания
―звено запаздывания

Пример:

Доказать, что звено
физически реализуемо
 ,
, .
.


 ―запаздывание,
―запаздывание,
 ― опережение на один шаг квантования
― опережение на один шаг квантования

Управление на
 интервале равно управлению с коэффициентом
интервале равно управлению с коэффициентом на предыдущем интервале + входной сигнал
с коэффициентом
на предыдущем интервале + входной сигнал
с коэффициентом на последнем интервале + входной сигнал
с коэффициентом
на последнем интервале + входной сигнал
с коэффициентом на текущем интервале + входной сигнал
с коэффициентом
на текущем интервале + входной сигнал
с коэффициентом на предыдущем интервале.
на предыдущем интервале.

 физически
нереализуемо
физически
нереализуемо



Синтез последовательной непрерывной корректировки устройства
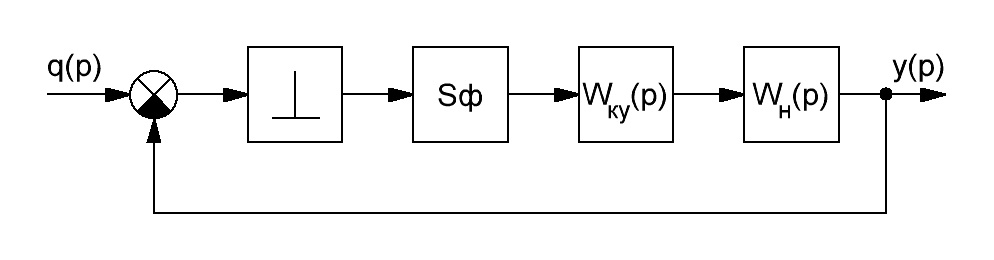
 ―переходная
функция непрерывного корректирующего
устройства, которое необходимо определить.
Желаемая переходная функция разомкнутой
системы:
―переходная
функция непрерывного корректирующего
устройства, которое необходимо определить.
Желаемая переходная функция разомкнутой
системы:




Алгоритм синтеза последовательно корректирующего устройства:
1. По требуемым
динамическим устройствам системы
записать дискретную передаточную
функцию замкнутой функции 
2. Определить желаемую передаточную функцию разомкнутой системы



3. Согласно формуле (19) определить желаемую передаточную функцию разомкнутой непрерывной системы
4. Согласно формуле
(20) определить

Пример:

 ,
,
 ,
, ,
,
Без наличия
корректирующего устройства
 передаточная функция:
передаточная функция:



Система неустойчива.

Задаемся любыми
 и
и для необходимых динамических свойств
системы (
для необходимых динамических свойств
системы ( ,
,



Звено физически реализуемо.
Расчёт
динамических характеристик импульсной
САУ

Один из методов расчёта основан на том, что выражение (*) раскладываем на сумму простейших слагаемых и используем обратное Z-преобразование и находим:

Таблица обратного Z-преобразования для основных видов сигналов
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|










 ―номер шага
квантования
―номер шага
квантования
Пример:
Рассчитать и построить передаточную характеристику импульсной САУ. Пусть передаточная функция системы имеет вид:



Импульсной система
устанавливается, так как
 ,
,

Разложим
 :
:






По третье формуле:






Для перехода к
абсолютному времени необходимо знать
 .
.



Пример:

























1. Определить алгоритм реализации ЦУУ на ЭВМ



2. Рассчитать и построить переходную характеристику системы












Разложение в ряд Лорана



Для того, чтобы представить выражение в виде ряда Лорана, надо числитель разделить на знаменатель:




НЕЛИНЕЙНЫЕ САУ
Метод гармонической линеаризации
В общем виде при наличии одной нелинейности структурная схема САУ:

НЭ ― нелинейный элемент
 ―ПФ линейной
части системы
―ПФ линейной
части системы
Выходной сигнал НЭ можно разложить в ряд Фурье:

 ―постоянная
составляющая сигнала
―постоянная
составляющая сигнала
 ,
,
 ― амплитудыsin
и cos
составляющая первой гармоники
― амплитудыsin
и cos
составляющая первой гармоники
 ―частота первой
гармоники
―частота первой
гармоники
Метод гармонической линеаризации базируется на допущении, что линейная часть системы является фильтром для высокочастотной составляющих, то есть пропускается только одна гармоники. Это допущение на практике, как правило, выполняется, так как линейная часть является инерционной.
С учётом указанного допущения и без учёта постоянной составляющей, можно записать:

Так как линейная
часть не пропускает высшие гармонические
составляющие, то
 ― амплитуда входного сигнала:
― амплитуда входного сигнала:

Уравнение (23) описывает поведение НЭ.
Из уравнения (23) выразим sin и дифференцируем:


Подставив sin м cos в (22), запишем:



Получили АДУ (24),
описывающее поведение НЭ. Коэффициенты

 зависят от амплитуды входного сигнала
НЭ.
зависят от амплитуды входного сигнала
НЭ.
Преобразуем уравнение (24) по Лапласу:

Для однозначных
НЭ
 .
Тогда:
.
Тогда:

― безынерционное звено с переменным коэффициентом усиления.

Однозначный НЭ ― одному значению входного сигнала соответствует одно значение выходного сигнала.
Неоднозначный НЭ ― одному значению входного сигнала может соответствовать несколько выходных значений.




Электромагнитное реле:

Коэффициент возврата:

Метод гармонической
линеаризации широко применяется для
анализа релейных САУ, которые на практике
находят относительно широкое применение.
Под анализом релейных САУ понимают
определение параметров автоколебаний
― частоты
 .
.
Чем меньше амплитуда автоколебаний, тем система качественнее. Система является релейной, если хоть один из сигналов квантуется по уровню.
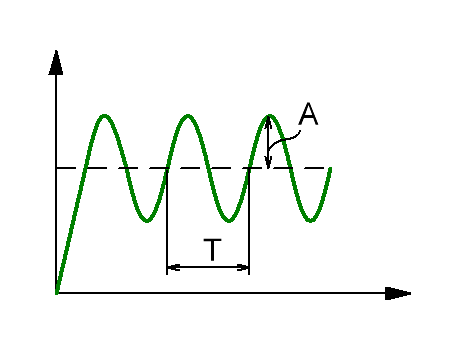
Аналитический метод определения параметров автоколебаний
Аналитический метод основан на методе использования критерия устойчивости Михайлова.
Режим возникновения автоколебаний возникает, когда система находится на грани устойчивости, то есть годограф Михайлова проходит через начало координат.
Методика:
Записываем передаточную функцию замкнутой системы
По передаточной функции записывается характеристическое уравнение

Приравняем к нулю действительную и мнимую часть

Из системы находим
 и
и .
.
Зная конкретный
вид нелинейности по
 находим
находим ― амплитуда колебаний на входе НЭ.
― амплитуда колебаний на входе НЭ.
Согласно структуре
схемы находится
 ― амплитуда автоколебаний выходной
координаты.
― амплитуда автоколебаний выходной
координаты.
Наличие действительных
положительных значений
 и
и удовлетворяет системе
удовлетворяет системе является необходимым, но недостаточным
условием возникновением автоколебаний.
Для этого необходимо выполнение условия:
является необходимым, но недостаточным
условием возникновением автоколебаний.
Для этого необходимо выполнение условия:

Индекс п ― после
взятия частной производной от
 ,
, .
.
Пример:

Релейная САУ стабилизации скорости ДПТ.
 ,
,
 ,
, ,
, ,
, ,
,
При положительном сигнале на выходе релейного элементе замыкаются ключи КВ, а при отрицательном ― КН (изменятся полярность напряжения ― разгон и торможение).

1. Определить передаточную функцию














Устойчивость автоколебаний:



Условие устойчивости выполняется.
Для улучшения качества релейных САУ необходимо на вход РЭ, помимо выходной координаты, подать сигналы, пропорциональные производным от выходных координат ― промежуточные координаты объекта, которые содержат производные от выходных координат.
Пример:
Введём обратную связь по току:












 ―амплитуда первой
гармоники на выходе
―амплитуда первой
гармоники на выходе



Система качественная.
Для примера 1:


Графический метод определения автоколебаний (метод Гольдфарба)
Структурная схема нелинейной САУ:





Точки пересечения
M
и N
дают решения задачи.
 ―определяет
частоту, а
―определяет
частоту, а
 ― амплитуду
― амплитуду
Причём автоколебания
будут устойчивыми, если при возрастании
A
характеристика
 входит в АФЧХ
входит в АФЧХ (в точкуM).
Точка M
определяет искомое решение задачи.
(в точкуM).
Точка M
определяет искомое решение задачи.
Пример:
 ,
,
 ,
, ,
, ,
, ,
,

Используя метод Гольдфарба, определяем параметры и устойчивость автоколебаний.









Строим
 .
Найдём точки пересечения с осью абсцисс:
.
Найдём точки пересечения с осью абсцисс:

Определим точки
 в точкеM:
в точкеM:




Вынужденные колебания в нелинейной САУ
При наличии возмущающего воздействия, изменяющегося по гармонического закону, структурная схема нелинейной САУ в общем виде можно представить следующим образом:

Пусть частота изменяется по гармоническому закону:

где
 ― амплитуда возмущающего воздействия,
― амплитуда возмущающего воздействия, ―
частота возмущающего воздействия
―
частота возмущающего воздействия
Принцип суперпозиции
решений уравнений для нелинейной САУ
несправедлив, то есть нельзя складывать
свободное и вынужденное колебания.
Вынужденное колебание определяется
возмущающим воздействием
 ,
а свободная ― параметрами системы.
,
а свободная ― параметрами системы.
Выходная величина
 ,
при условии захвата вынужденных колебаний
(синхронизации), когда в системе устойчивы
автоколебания с частотой, равной частоте
возмущающего воздействия, можно записать:
,
при условии захвата вынужденных колебаний
(синхронизации), когда в системе устойчивы
автоколебания с частотой, равной частоте
возмущающего воздействия, можно записать:

 ―амплитуда
выходных колебаний
―амплитуда
выходных колебаний
 ―угол сдвига по
фазе между выходным сигналом и возмущающим
воздействием
―угол сдвига по
фазе между выходным сигналом и возмущающим
воздействием
Из уравнений (30) и (31) выразим возмущающее воздействие через выходную координату. Возмущающее воздействие запишем следующим образом:

Из (31):

Продифференцируем:

Подставим
 и
и в (32):
в (32):

Найдём изображение возмущающего воздействия:

Из структурной схемы:

Подставим
 из (34):
из (34):



Характеристическое уравнение:





В итоге график
решения уравнения (35) можно найти
амплитуду вынужденных автоколебаний
 ,
если при амплитуде возмущающего
воздействия
,
если при амплитуде возмущающего
воздействия и частоте
и частоте :
:

Точки пересечения даёт искомое решение.
Если нет точек
пересечения окружностей с кривой
 ,
значит, в системе отсутствует захват
вынужденных колебаний.
,
значит, в системе отсутствует захват
вынужденных колебаний.
Чем больше
 ,
тем выше вероятность захвата. Явление
захвата является нежелательным, так
как оно приводит к увеличению колебаний
выходных характеристик.
,
тем выше вероятность захвата. Явление
захвата является нежелательным, так
как оно приводит к увеличению колебаний
выходных характеристик.
 ―минимальная
амплитуда возмущающего воздействия,
при котором происходит захват.
―минимальная
амплитуда возмущающего воздействия,
при котором происходит захват.

Пример:
САУ стабилизации скорости:


















Положим, что
известно
 .
Задавая
.
Задавая
 ,
строим кривую:
,
строим кривую:
|
|
|
|
|
1 |
-392,8 |
192,5 |
|
5 |
-461,8 |
180,1 |
|
10 |
-548 |
164,6 |
|
20 |
-720,4 |
133,5 |




В системе отсутствует явление захвата вынужденных автоколебаний.
СИСТЕМЫ ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ (СЭУ)
СЭУ составляют особый класс САУ и могут быть построены только для таких объектов, в которых выходная величина имеет экстремальную зависимость от входной.

Целью функционирования СЭУ является поддержание режима работы объекта в точке экстремума.
Пример:
Нагреваем печь. Q ― подача воздуха, q ― подача топлива.
При постоянной подаче топлива зависимость температуры от подачи воздуха:


Для каждой подачи
топлива существует оптимальная подача
воздуха, для которой
 .
.
Из приведённых
зависимостей видно, что можно построить
систему поддержания задания
 в печи при минимальном расходе топлива.
в печи при минимальном расходе топлива.
Это значение можно
поддерживать при
 ,
, и так далее. Но можно и при
и так далее. Но можно и при ― минимальный расход топлива.
― минимальный расход топлива.
Функциональная схема САУ стабилизации температуры в печи:

РПТ ― регулятор подачи топлива
ДТ ― датчик температуры
УСН ― устройство самонастройки, обеспечивает оптимальную подачу воздуха, при которой подача топлива будет минимально возможной
Пример: Дизель
Все дизели, как правило, снабжаются центробежным механическим регулятором скорости. В этом случае водитель положение педали газа задаёт скорость дизеля, а подача топлива выбирается автоматически в зависимости от нагрузки.
При наличии карбюратора, двигатель задаёт подачу топлива, а скорость двигателя изменяется в зависимости от нагрузки.
При наличии регулятора скорости, скорость дизеля от нагрузки не изменяется.
Характеристика дизеля:
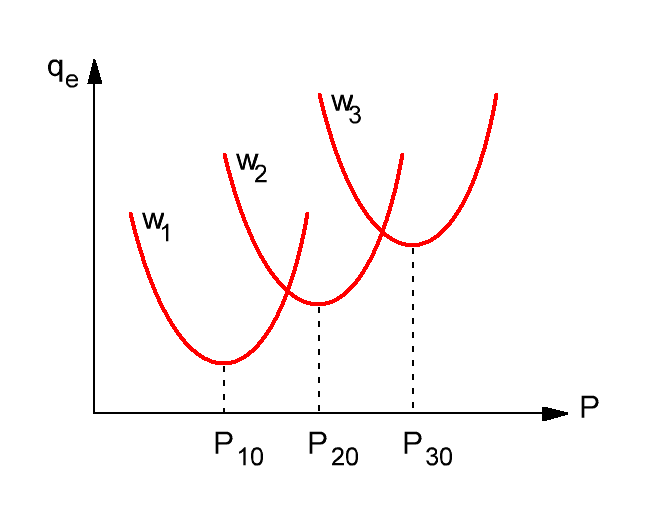
 ―удельный расход
топлива
―удельный расход
топлива

Из приведённых характеристик видно, что для любой скорости дизеля (при любом положении педали газа) существует оптимальная нагрузка по мощности, при которой удельный расход топлива минимален. Недогрузка, перегрузка ― плохо.
На большегрузных автомобилях используется электротрансмиссия, которая позволяет плавно изменять коэффициент передачи между скоростью дизеля и движения. Причём электротрансмиссия используется на автомобилях грузоподъёмностью более 50 тонн. Использование электротрансмиссии на меньшие мощности является экономически нецелесообразно.
Функциональная схема:

Г ― генератор, используемый на одном валу с дизелем
М ― электродвигатель, приводящий в движение колесо
ДС ― датчик скорости дизеля
НБ ― нелинейный блок, задающий мощность генератора
РМ ― регулятор мощности
ПР ― преобразователь, питающий обмотку возбуждения генератора
БУ ― блок умножения, на выходе положительный сигнал, пропорциональный мощности
ДТ ― датчик тока
Его характеристика
строится на основании характеристик
удельного расхода топлива
 :
:

Система не является СЭУ ― это система стабилизации мощности, но при её построении используется характеристика удельного расхода топлива.
На практике дизель не работает в точке экстремума, а с отклонениями, так как в процессе эксплуатации характеристика дизеля изменяется.
Принцип построения сэу
1. СЭУ с запоминанием экстремума
Блок-схема имеет вид:

ОУ ― объект управления
ИЭ ― исполнительный элемент
РЭ1 ― релейный
элемент с зоной нечувствительности

ФИ ― формирователь короткого импульса (ОВ)
Т ― триггер со счётным входом
РЭ1,2 ― релейные элементы
С выхода РЭ2 сигнал положительный, с выхода РЭ1 ― отрицательный.
В качестве исполнительного элемента может служить электродвигатель:

При одной полярности
движение вверх,
 возрастает, при второй полярности
движение реверсируется, двигатель
двигается вниз,
возрастает, при второй полярности
движение реверсируется, двигатель
двигается вниз, уменьшается.
уменьшается.
Либо интегратор на ОУ:

ЗУ ― запоминающее устройство
При возрастании
 выходной сигнал
выходной сигнал равен входному. При переходе точки
экстремума выходной сигнал выходной
сигнал равен максимальному значению,
то есть ЗУ запоминает значение
равен входному. При переходе точки
экстремума выходной сигнал выходной
сигнал равен максимальному значению,
то есть ЗУ запоминает значение .
.
При возрастании
входного напряжения
 напряжение на конденсаторе равняется
входному напряжению
напряжение на конденсаторе равняется
входному напряжению .
При уменьшении
.
При уменьшении значение напряжения на конденсаторе
значение напряжения на конденсаторе сохраняется, так как диод не даёт
возможности разрядить конденсатор, при
замыкании КЛ можно разрядить конденсатор.
сохраняется, так как диод не даёт
возможности разрядить конденсатор, при
замыкании КЛ можно разрядить конденсатор.

Пусть начальное
значение объекта
 и
и и триггер Т был в таком положении, что
и триггер Т был в таком положении, что .
С выхода РЭ2 сигнал положительный и на
вход ИЭ подаётся напряжение положительной
полярности. Это приводит к уровню
.
С выхода РЭ2 сигнал положительный и на
вход ИЭ подаётся напряжение положительной
полярности. Это приводит к уровню ,
соответственно увеличивается и
,
соответственно увеличивается и (характеристика). С выхода первого
сумматора
(характеристика). С выхода первого
сумматора (выходной сигнал ЗУ равен входному).
(выходной сигнал ЗУ равен входному).
После достижения
точки экстремума выходной сигнал ЗУ
больше входного, так как ЗУ запоминает
максимальное значение,
 возрастает.
возрастает.
При достижении
выходного сигнала сумматора первого
значения, превышающего зону
нечувствительности
 РЭ1, на выходе РЭ1 появляется сигнал,
что привод к срабатыванию ФИ. Импульс
обнуляет ЗУ (
РЭ1, на выходе РЭ1 появляется сигнал,
что привод к срабатыванию ФИ. Импульс
обнуляет ЗУ ( ).
Выходной сигнал ФИ перебрасывает триггер
Т в другое состояние,
).
Выходной сигнал ФИ перебрасывает триггер
Т в другое состояние, .
Отрицательный сигнал на выходе ИЭ
приведёт к уменьшению
.
Отрицательный сигнал на выходе ИЭ
приведёт к уменьшению и
и и цикл повторяется.
и цикл повторяется.
2. СЭУ с непрерывным поисковым сигналом
Блок-схема имеет вид:

Ф1,2,3 ― фильтры
Ф1 ― узкополосный,
выдаёт первую гармоническую составляющую
из выходного сигнала объекта с частотой

ГГК ― генератор гармонических колебаний


Ф2 сдвигает выходной
сигнал ГГК на угол


БУ ― блок умножения

Ф3 ― фильтр, выделяющий последнюю составляющую
Работа схемы основана на следующем принципе:
При нахождении
системы до точки экстремума увеличивается
входная
 ,
вызывающая увеличение
,
вызывающая увеличение .
. и
и совпадают по фазе для первой гармоники.
При нахождении системы за точкой
экстремума, увеличении
совпадают по фазе для первой гармоники.
При нахождении системы за точкой
экстремума, увеличении вызовет изменение
вызовет изменение для первой гармонической составляющей.
для первой гармонической составляющей. и
и сдвигаются на
сдвигаются на .
.

Принцип действия
основан на том, что при нахождении
системы до точки экстремума сигналы
совпадают по фазе, а при нахождении
системы после точки экстремума ―
двигаются на
 .
.
Система находится до точки экстремума:

При прохождении точки экстремума, сигнал:


После прохождения
экстремума, изменится полярность
 ,
что приведёт к уменьшению сигнала на
входе объекта
,
что приведёт к уменьшению сигнала на
входе объекта .
.
Таким образом, система всё время совершает движение возле точки экстремума.
3. СЭУ с определяемой производной
Блок-схема:

БД ― блок деления
ДУ1,2 ― дифференцирующие устройства

Система поддерживает
равенство
 ,
тем самым обеспечивается работа ОУ в
точке экстремума.
,
тем самым обеспечивается работа ОУ в
точке экстремума.
Когда
 ,
, увеличивается, а когда
увеличивается, а когда ,
, уменьшается.
уменьшается.
Плюсы:
Позволяет поддерживать работу устройства в точке экстремума.
Минусы:
Наличие ДУ, что снижает помехозащищенность системы.