

Содержание
1 Описание объекта проектирования
Привод стола контрольно-измерительного прибора предназначен для использования в качестве модуля загрузки и транспортирования на измерительную позицию объекта измерения.
Привод стола состоит из корпуса, в котором размещаются элементы передачи – конические зубчатые колёса, валы, подшипники, муфта и т.д. В корпусе размещают также устройства для смазывания и контрольные выключатели.
Редуктор проектируем для привода определённой машины по заданной нагрузке. Корпус выполняем сварным.
Валы монтируются на подшипниках качения. Выбор вертикальной схемы для редуктора обусловлен общей компоновкой привода стола.
Привод стола контрольно-измерительного прибора предназначен для преобразования электрической энергии, подаваемой на двигатель, в механическую – поступательное перемещение стола с заданной скоростью v = 50 мм/с.
Исходные данные представлены в таблице 1.1 и на рисунке 1.1.
Таблица 1.1 – Исходные данные
|
Тяговая cила F,H |
Скорость V, мм/с |
a x в, мм |
L, мм |
Тип направляющих |
Тип производства |
|
600 |
50 |
150 x 200 |
180 |
скольжения |
единичное |
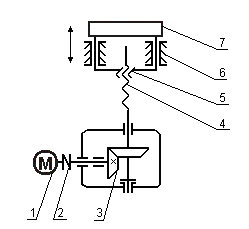
Рисунок 1.1 – Схема стола контрольно-измерительного прибора
Крутящий момент от двигателя (1) через муфту (2) передаётся на ведущий вал. Этот вал передаёт крутящий момент с помощью шпоночного соединения с сегментной шпонкой зубчатому колесу (3). Оно, в свою очередь, вращает ведомое зубчатое колесо, которое посредствам шпоночного соединения с призматической шпонкой передаёт крутящий момент винту (4). Винт, представляющий из себя составной элемент передачи винт-гайка, превращает вращательное движение в поступательное – поднимает и опускает стол. Гайка (5), которая движется вдоль оси винта (4), соединена со столом (7), поэтому стол совершает возвратно – поступательное движение путём «накручивания» гайки (5) на винт (4). Направляющие (6) несут вертикальную нагрузку.
Сборка и демонтаж соединений проводится в соответствии с чертежом.
2 Выбор двигателя и кинематический расчёт
2.1. Выбор электродвигателя
Определим требуемую мощность P электродвигателя при поступательном движении рабочего элемента, используя формулу:

где P – мощность электродвигателя, Вт;
F – тяговая сила стола, Н;
V – скорость перемещения стола прибора, м/с.
Kдин – коэффициент запаса, учитывающий необходимость преодоления динамических нагрузок в момент разгона (Kдин = 1,05);
η – коэффициент полезного действия привода, равный произведению частных КПД передач, входящих в кинематическую схему.
Вычислим коэффициент полезного действия привода, исходя из кинематической схемы, данной в задании (приложение 1):

где
 -
КПД пары подшипников качения
-
КПД пары подшипников качения ;
;
 -
КПД муфты
-
КПД муфты
 ;
;
 -
КПД передачи винт-гайка
-
КПД передачи винт-гайка
 ;
;
 -
КПД зубчатой конической пары
-
КПД зубчатой конической пары
 ;
;
Получим значение коэффициента полезного действия привода:

Вычислим требуемую мощность P электродвигателя:

Примем Р = 90 Вт.
Исходя из этих расчётов, выберем необходимый двигатель привода стола контрольно-измерительного прибора: 4ААМ Е56В4. Технические характеристики приведены в таблице 2.1.
Таблица 2.1 - Технические характеристики двигателя
|
Обозначение |
Р, Вт |
n, об/мин |
|
cosφ |
η, % |
|
|
|
|
Четырехполюсные, синхронная частота вращения 1500 об/мин | ||||||||
|
Т56В4 |
90 |
1380 |
7,5 (4,0) |
0,65 |
39 |
1,0 (1,7) |
1,5 |
0,8 (1,0) |



