

23. Перемножители сигналов
Перемножителями называются устройства, с помощью которых осуществляется математическая операция умножения двух сигналов. У них выходное значение пропорционально произведению двух входных независимых величин.
Если перемножители позволяют умножать сигналы любых полярностей, то их называют четырехквадрантными, а если один из сигналов может быть только одной полярности, то двухквадрантными.
Перемножители, умножающие однополярные сигналы, называются одноквадрантными. Различают перемножители прямого и косвенного умножений. При прямом умножении выходной сигнал непосредственно пропорционален произведению входных величин. Косвенное умножение характеризуется тем, что выходное значение, определяемое произведением входных сигналов, имеет вид сумм величин или функций этих сумм. К косвенным относят перемножители, выполненные на основе компонентов с логарифмическими или квадратичными (параболическими) амплитудными характеристиками, устройства с амплитудно-широтной импульсной модуляцией и др.
Прямое умножение осуществляется с помощью компонентов и электронных узлов, имеющих двойное управление, например выполненных на основе каскодных усилительных каскадов.
Если
перемножаемые сигналы имеют существенно
различные частоты (один представляет
собой высокочастотную несущую с частотой
со, а другой — низкочастотное колебание,
имеющее частоту Q), то в результате
умножения появится амплитудно-модулированный
сигнал ![]() где
где ![]() —
коэффициент модуляции. Устройство,
выполняющее эту операцию, называют
амплитудным модулятором или просто
модулятором. Форма и спектр
амплитудно-модулированного сигнала
показаны на рис. 6.40, а, б.
—
коэффициент модуляции. Устройство,
выполняющее эту операцию, называют
амплитудным модулятором или просто
модулятором. Форма и спектр
амплитудно-модулированного сигнала
показаны на рис. 6.40, а, б.
Если
в спектре выходного сигнала отсутствуют
или достаточно малы составляющие с
частотой ![]() и
и ![]() (рис.
6.40, в), то перемножитель, осуществляющий
такое умножение, называют балансным
модулятором. Балансные модуляторы
представляют собой высококачественные
четырехквадратичные перемножители, у
которых нормируются коэффициенты
ослабления сигнала опорной частоты
(рис.
6.40, в), то перемножитель, осуществляющий
такое умножение, называют балансным
модулятором. Балансные модуляторы
представляют собой высококачественные
четырехквадратичные перемножители, у
которых нормируются коэффициенты
ослабления сигнала опорной частоты ![]() и
модулирующей (управляющей)
и
модулирующей (управляющей) ![]() частот,
где
частот,
где ![]() —
выходные сигналы с частотой
—
выходные сигналы с частотой ![]() и
и ![]() .
.
24 Пассивные и активные фильтры. Активные rc-фильтры нижних и верхних частот. Полосовые фильтры.
Общие сведения об электрических фильтрах
Фильтры применяют для частотной селекции сигналов. Электрическим фильтром называется устройство (четырехполюсник), которое пропускает без ослабления или с малым ослаблением сигналы в заданном диапазоне частот (в заданной полосе), и не пропускает или пропускает с большим ослаблением сигналы других частот.
Полоса частот, в которой ослабление мало, называется полосой пропускания,(прозрачности) фильтра. Полоса частот, в которой ослабление велико, называется полосой непропускания (задержания) фильтра. Между полосами пропускания и непропускания находится переходная область. Частоты, которые соответствуют границам полос пропускания называются граничными или частотами среза и обозначаются ωгр или ωср.
По частотным свойствам различают следующие фильтры (рис. 6.1): фильтры нижних частот (ФНЧ) пропускают колебания с частотами от нуля до некоторой верхней частоты ωср1, фильтры верхних частот (ФВЧ) - колебания с частотой не ниже некоторой нижней частоты ωср2. Полосовые фильтры (ПФ) имеют полосу пропускания от ωср1 до ωср2, режекторные (РФ), или заградительные (ЗФ), фильтры не пропускают колебания внутри интервала частот [ωср1, ωср2].

Рис. 6.1. Частотные характеристики идеальных (сплошная кривая) и реальных (пунктирная) фильтров нижних частот (а), верхних (б), полосового (в) и режекторного (г).
Кроме классификации фильтров по их частотным свойствам они подразделяются и по способам получения нужных частотных свойств. Фильтры создаваемые на базе реактивных четырехполюсников, в которых произведение сопротивлений продольного Z1 и поперечного Z2 плеч не зависит от частоты и для данного фильтра представляет собой некоторое постоянное число k называется k-фильтрами.
Фильтры, полученные из k–фильтров с использованием пересчетного коэффициента m и в которых произведение сопротивлений плеч зависит от частоты, называются m-фильтрами.
Фильтры могут быть созданы только из пассивных LC- или RC–элементов или из RC – элементов в сочетании с активными элементами (операционными усилителями). Поэтому различают пассивные LC- и RC-фильтры и активные RC–фильтры. LC- и RC–цепочки называются звеньями. Каждое звено имеет продольное и поперечное плечо. Сопротивление продольного плеча обозначается Z1, а поперечного - Z2. Если Z1 носит индуктивный характер, то Z2 должно носить емкостной характер и наоборот. Схемы Г- ,T- и П-образных звеньев LC–фильтров изображены на рис. 6.2.

Рис. 6.2. Схемы Г- (а), Т- (б) и П- (в) образных звеньев LC-фильтров.
Фильтры могут быть однозвенные (первого порядка), двухзвенные (второго порядка) и многозвенные (n- го). Чем выше порядок фильтра, тем круче его амплитудно-частотная характеристика и тем более она похожа на его идеальную характеристику. Фильтр любого порядка можно построить путем каскадного соединения фильтров первого и второго порядков.
LC–фильтр
нижних частот (рис. 6.3,а) пропускает
электрические колебания в полосе частот
от 0 до ![]() .
.

Рис. 6.3. Схема LC-фильтра нижних частот (а) и его АЧХ (б).
Это объясняется тем, что на низких частотах сопротивление индуктивного элемента XL фильтра мало, а емкостного XC – велико и электрические колебания проходят со входа на выход почти без ослабления. С увеличением частоты сопротивление индуктивного элемента возрастает, а емкостного – снижается и коэффициент передачи фильтра уменьшается (рис. 6.3,б).
LC-фильтр
верхних частот (рис. 6.4,а) не пропускает
нижних частот так, как XC велико, XL мало.
С ростом частоты сопротивление продольного
плеча (XC) уменьшается, а поперечного
(XL) увеличивается, что приводит к повышению
коэффициента передачи. Полоса пропускания
такого фильтра лежит в диапазоне
частот ![]() до
ƒ = ∞ (рис. 6.4,б).
до
ƒ = ∞ (рис. 6.4,б).

Рис. 6.4. Схема LC-фильтра верхних частот (а) и его АЧХ (б).
Принцип работы полосового фильтра (рис. 6.5,а) основан на использовании резонансов напряжений и токов в последовательных и параллельных колебательных контурах.

Рис. 6.5. Схема полосового LC-фильтра (а) и его АЧХ (б).
RC-фильтр нижних частот. На частотах до нескольких десятков килогерц применяются RC-фильтры, состоящие из резисторов и конденсаторов. В качестве фильтра нижних частот (ФНЧ) используется одно или несколько включённых последовательно RC-звеньев, ёмкость включается в поперечное звено (рис.6.7,а).
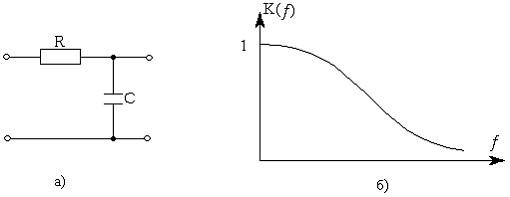
Рис. 6.7. Схема пассивного RC-фильтра нижних частот (а) и его АЧХ (б).
С увеличением частоты сопротивление конденсатора уменьшается, что приводит к уменьшению коэффициента передачи (рис. 6.7,б).
В RC-фильтре верхних частот (ФВЧ) конденсатор включён в продольное плечо (рис. 6.8,а). Поэтому на низких частотах его сопротивление значительно больше сопротивление резистора параллельного плеча и коэффициент передачи мал. С увеличением частоты сопротивление конденсатора уменьшается, что приводит к увеличению коэффициента передачи (рис. 6.8,б).

Рис. 6.8. Схема пассивного RC-фильтра верхних частот (а) и его АЧХ (б).
Рассмотренные ФНЧ и ФВЧ, состоящие из нескольких однотипных звеньев RC, называются цепочечными RC-фильтрами.
В качестве полосового RC-фильтра на низких частотах применяется Г-образный RC-фильтр (рис. 6.9,а).

Рис. 6.9. Схема пассивного полосового RC-фильтра (а) и его АЧХ (б).