13.2. Общие сведения о методах изготовления зубчатых колес
Существуют два принципиально различных метода изготовления зубчатых колес - метод копирования и метод обкатки (огибания).
П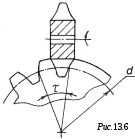 риметоде
копирования
профиль инструмента точно совпадает с
профилем впадины изготовляемого колеса.
В качестве инструмента используются
модульная дисковая (рис.13.6) или пальцевая
фреза, фасонный резец и др. После
обработки каждой впадины заготовка
поворачивается на один угловой шаг:
риметоде
копирования
профиль инструмента точно совпадает с
профилем впадины изготовляемого колеса.
В качестве инструмента используются
модульная дисковая (рис.13.6) или пальцевая
фреза, фасонный резец и др. После
обработки каждой впадины заготовка
поворачивается на один угловой шаг:
![]() .
.
Процесс
повторяется до тех пор, пока не будут
нарезаны все зубья (![]() - центральный
угол). Так как форма эвольвенты зависит
от радиуса основной окружности, то
колеса одного модуля, но с разным числом
зубьев должны нарезаться фрезами с
различной кривизной эвольвенты. Но
бесконечное количество фрез иметь
невозможно, поэтому промышленностью
изготавливаются
комплекты, состоящие из 8 фрез. Это
приводит к неточности изготовления
колес. Вторым существенным недостатком
метода копирования является низкая
производительность труда.
- центральный
угол). Так как форма эвольвенты зависит
от радиуса основной окружности, то
колеса одного модуля, но с разным числом
зубьев должны нарезаться фрезами с
различной кривизной эвольвенты. Но
бесконечное количество фрез иметь
невозможно, поэтому промышленностью
изготавливаются
комплекты, состоящие из 8 фрез. Это
приводит к неточности изготовления
колес. Вторым существенным недостатком
метода копирования является низкая
производительность труда.
П риметоде
обкатки
инструмент и заготовка имеют такое же
относительное движение, как два зубчатых
колеса в зацеплении.
Поэтому
инструмент представляет собой колесо
с зубьями эвольвентного профиля,
заточенными для осуществления резания.
Такое инструментальное колесо называется
долбяком
(рис. 13.7).
риметоде
обкатки
инструмент и заготовка имеют такое же
относительное движение, как два зубчатых
колеса в зацеплении.
Поэтому
инструмент представляет собой колесо
с зубьями эвольвентного профиля,
заточенными для осуществления резания.
Такое инструментальное колесо называется
долбяком
(рис. 13.7).
Кроме долбяка используется зуборезная рейка с прямолинейными профилями зубьев или червячная фреза, которая в нормальном сечении витков имеет профиль рейки. Преимущества метода обкатки – высокая производительность, большая точность, возможность нарезания колес одного модуля с различными числами зубьев одним и тем же инструментом.
13.3. Кинематика зубчатых механизмов с неподвижными осями вращения
Для получения больших передаточных отношений применяются многоступенчатые передачи, составленные из нескольких простых зубчатых передач. Рассмотрим трехступенчатую передачу.
Передаточное отношение всего механизма равно
![]() (13.2)
(13.2)
а передаточное отношение отдельных ступеней –
![]()
Перемножим эти отношения:
![]() (13.3)
(13.3)
Сравнивая выражения (13.2) и (13.З), получим
![]()
т.е. передаточное отношение многоступенчатой передачи равно произведению передаточных отношений отдельных ступеней.
Колеса 1 и 4 вращаются в одну сторону. Таким образом,
![]()
Если все ступени являются цилиндрическими передачами, то в общем случае
 (13.4)
(13.4)
где n – число внешних зацеплений.
Частным случаем многоступенчатой передачи является ступенчатый ряд с промежуточными (паразитными) колесами (рис.13.9).
![]()
Промежуточные колеса не влияют на величину общего передаточного отношения, но могут изменять его знак. Такие передачи применяются для изменения направления вращения ведомого звена, а также в случае передачи вращения между удаленными валами. В общем случае
![]() (13.5)
(13.5)
13.4. Кинематика зубчатых механизмов с подвижными осями вращения
К механизмам с подвижными осями относятся механизмы, в составе которых имеется хотя бы одно колесо с перемещающейся в пространстве осью вращения (сателлит). Различают три вида таких механизмов:
1) дифференциальные
2) планетарные
3) замкнутые дифференциальные
Рассмотрим один из простейших дифференциальных механизмов (рис.13.10).Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
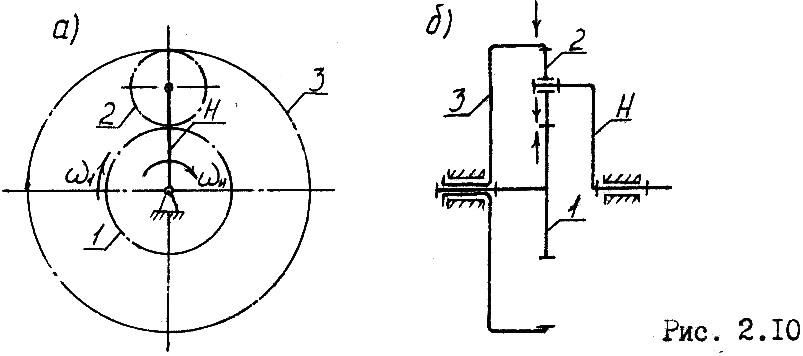
![]()
Получим
формулу, связывающую угловые скорости
звеньев в дифференциальном механизме.
Используем метод обращения движения.
Сообщаем всем звеньям механизма
дополнительную угловую скорость, равную
угловой скорости водила Н, но противоположно
направленную, т.е. (![]() ).
При этом относительное движение звеньев
не изменится, а угловые скорости в
обращенном движении будут следующими:
).
При этом относительное движение звеньев
не изменится, а угловые скорости в
обращенном движении будут следующими:
![]()
Таким
образом, так как
![]() то
дифференциальный механизм превратился
в зубчатый механизм с неподвижными
осями. Для такого обращенного механизма
то
дифференциальный механизм превратился
в зубчатый механизм с неподвижными
осями. Для такого обращенного механизма
![]() (13.6)
(13.6)
где
![]() –
передаточное
отношение обращенного механизма,
определяемое через число зубьев
колес:
–
передаточное
отношение обращенного механизма,
определяемое через число зубьев
колес:
![]()
Полученное выражение(13.6) называется формулой Виллиса. В общем случае формула Виллиса имеет вид
![]()
Если в дифференциальном механизме одно из центральных колес сделать неподвижным, то получится планетарный механизм (рис. 13.11).
Т ак
как
ак
как![]() то из формулы
то из формулы
![]() получим:
получим:
![]()
![]()
![]() (13.7)
(13.7)
Выражение(13.7) называется формулой Виллиса для планетарных механизмов. В общем случае она имеет вид
![]() (13.8)
(13.8)
где индекс в соответствует неподвижному центральному колесу.
Планетарные механизмы часто называются планетарными передачами. Они позволяют получать большие передаточные отношения при малых габаритах.
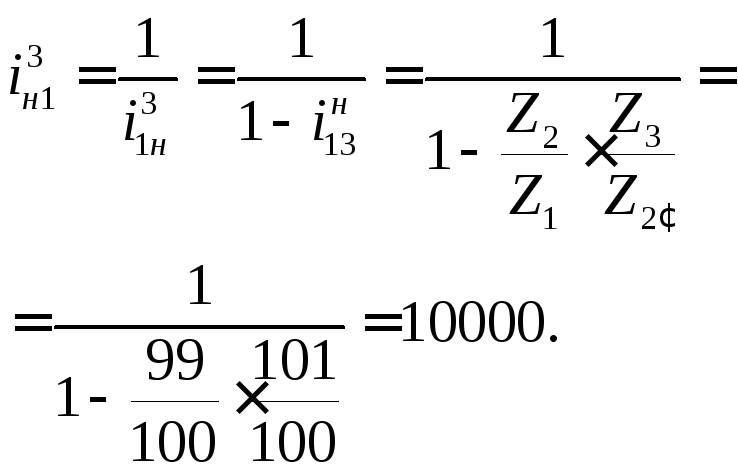
Пример.
Определить
![]() если
если![]()
![]()
![]() (рис.13.12).
(рис.13.12).
На основании формулы (13.7) находим