

10.4. Мощность
Скалярная величина
![]() ,
,
характеризующая быстроту совершения работы, называется средней мощностью силы. В СИ мощность выражается в ваттах:
![]()
![]()
Если в течение некоторого времени t мощность машины остается постоянная или существенно неизменно, то произведена работа выражается формулой:
![]()
отсюда и появляется
единица времени![]()
10.5. Механический коэффициент полезного действия
В технике работа сил обычно связана с преодолением различных сопротивлений, для выполнения этой работы создается множество разнообразных машин и механизмов.
Силы сопротивления
![]() ,
которые преодолевает любая машина
(механизм):
,
которые преодолевает любая машина
(механизм):
сопротивление для преодоления которого машины или механизмы и предназначены (полезное сопротивление) Fпс.
вредное сопротивление Fвс которое приходится вынуждено преодолевать попутно с полезной.
Тогда вся работа совершает машина или механизм:
![]()
где
![]() – работа по преодолении полезного
сопротивления, отсюда:
– работа по преодолении полезного
сопротивления, отсюда:
![]()
Отношения полезной работы ко всей совершенной работе называется механический коэффициент полезного действия.
![]()
В технике распространены случаи работы машин при их последовательном соединении друг с другом.
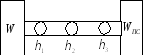
Допустим, имеем
совокупность трех механизмов с КПД![]() .Если
работа совершенная механизмам
.Если
работа совершенная механизмам ![]() и
их полезная работа
и
их полезная работа ![]() ,
то КПД всех точек механизмов:
,
то КПД всех точек механизмов:
![]()
Вывод: чем длиннее «цепочка» совместно работающих механизмов, тем меньше её общий КПД, причем общий КПД всегда меньше самого низкого из числа перемножаемых КПД.
10.6. Работа сил на наклонной плоскости
Пусть требуется поднять на высоту h груз, сила тяжести которого G.
Предположим, что подъем осуществляется тремя способами:
Вертикальный
По наклонной плоскости с углом подъема α.
По менее крутой плоскости с углом подъема β (β<α).
Если считать, что груз перемещается равномерно, то работа по подъеме груза во всех 3-х случаях совершаются одинакова:
![]()
Но, в первом случае
приходится преодолевать силу тяжести
G,
во
втором –
![]() ,
в третьем –
,
в третьем –![]()
Так как β<α, то
![]() ,
значит
,
значит![]()
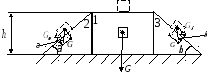
Наклонная плоскость, как одно из средств получения выигрыша в силе при перемещении тяжести, широко использование в технике.
Сила F направлена параллельно наклонной плоскости.

При перемещении вверх по наклонной плоскости тела и на него кроме силы F, действует еще три силы:
– сила тяжести G, нормальная реакция наклонной плоскости Rn,, значение которого равно:
![]()
– сила трения Rf , значения которого равно:
![]()
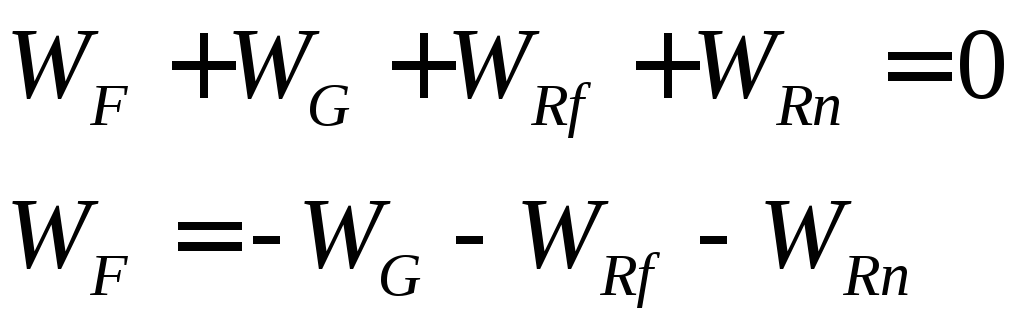
При равномерном подъеме тела М четыре силы образуют уравновешенную систему. Алгебраическая сумма работ этих сил равна нулю.
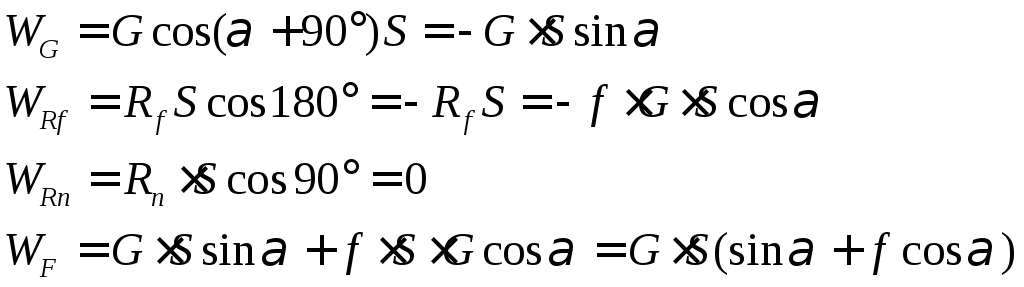
где ![]() – работа силы тяжести
– работа силы тяжести
![]() –работа силы
трения
–работа силы
трения
![]() –работа нормальной
реакции
–работа нормальной
реакции
Если же требуется
определить значение силы F,
то с учетом того, что
![]() получаем:
получаем:
![]()
Полезную часть
работы сил F
составляют работа по подъему тела на
высоту
![]() и
тогда:
и
тогда:
![]()
Таким образом КПД наклонной плоскости при подъеме груза силой направленной параллельно наклонной плоскости:
![]()
![]()
Вывод: КПД наклонной плоскости зависит только от ее угла наклона и коэффициента трения при перемещении груза по плоскости.
10.7. Работа и мощность при вращательном движении тел
Допустим, что к рукоятке C колеса, насаженного на ось OZ,
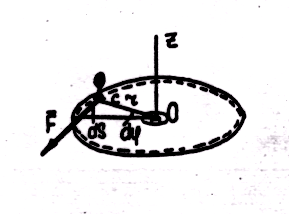
приложена
сила
![]() ,
постоянно направленная перпендикулярно
,
постоянно направленная перпендикулярно
![]() .
При вращении колеса точка приложения
силы
.
При вращении колеса точка приложения
силы
![]() перемещается по окружности и элементарная
работа этой силы
перемещается по окружности и элементарная
работа этой силы
![]() .
.
Но так
как
![]() ,
то
,
то
![]() ,
где произведение
,
где произведение
![]() называется вращающим
моментом.
Следовательно, при вращении тела
элементарная работа
называется вращающим
моментом.
Следовательно, при вращении тела
элементарная работа
![]() .
.
При
повороте колеса на угол
![]() работа
работа
 .
.
Если
при этом вращающий момент
![]() ,
то
,
то
![]()
(работа при вращении тела равна произведению вращающего момента на угол поворота).
Разделив
обе части этого равенства на
![]() время действия вращающего момента,
получим его мощность:
время действия вращающего момента,
получим его мощность:
![]() ,
,
или,
так как
![]() ,
,
![]()
(мощность при вращении тела равна произведению вращающего момента на угловую скорость).
Из последней формулы вытекает важное следствие:
![]()
(при постоянной мощности вращающий момент обратно пропорционален угловой скорости).