

V. Коррекция двухконтурной электромеханической следящей системы.
Так как переходная характеристика h(t) при настройке hуст = n [об/мин] имеет перерегулирование σ, которое не совпадает с σзад = 5%, то требуется ввести корректирующее устройство.
5.1. Коррекция сар скорости.
h1=tf(Kпу2)
h2=tf(Ку,[Ту1])
h3=tf(Кд,[Тм*ТаТм1])
hr=h1*h2*h3
Введём последовательное корректирующее устройство.
rltool
c=tf(1)
g=hr
f=tf(Ua)
h=tf(Kтг)

Рис. 11
На Рис. 11 представлена упрощенная схема корневого годографа.
Элементы корневого годографа:
G – разомкнутая САР скорости;
С – компенсатор, коэффициент передачи равен 1;
F – задающее напряжение, коэффициент передачи 220;
H – тахогенератор, коэффициент передачи Ктг.
Размещая
полюс p
и ноль z
на ЛАЧХ разомкнутой системы вблизи
запаса по амплитуде
![]() ,
добиваемся по выведенной переходной
характеристике заданного
,
добиваемся по выведенной переходной
характеристике заданного![]() =
4%.
=
4%.


>> c
Zero/pole/gain
0.85715 (s+27.03)
-----------------
(s+23.17)
Transfer function:
0.8523 s + 23.17
----------------
s + 23.17
ПФ
полученного КУ в zpk
- форме:![]()
ПФ
полученного КУ в tf
- форме:
![]()
Реализация корректирующего устройства:
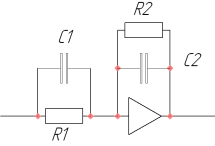
Рис. 12
На Рис. 12 представлена схема реализации корректирующего устройства.
Рассчитаем параметры элементов КУ:
T1 = 0,0368с; T2 = 0,0432с;
R1 = R2 = 10 кОм;
C1= 3,6 мкФ; С2 = 4,32 мкФ.
Получим график ПХ САР скорости с корректирующим устройством.
Вставим корректирующее устройство в структурную схему САР скорости.

Рисунок 13 – Скорректированная САР скорости


Коррекция с П-регулятором.


![]() =
0.4831
=
0.4831
Анализ чувствительности и точности САР скорости.
6.1. Анализ чувствительности по отклонению от заданного параметра.
Изменяя значение Т1 в корректирующем устройстве посмотрим как меняется перерегулирование и время регулирования.
Возьмем Т1 заданный, уменьшенный на 20% и увеличенный на 20 %, полученные данные занесем в таблицу 1.

Таблица 1
-
Т1,сек
 ,%
,% ,сек
,сек0.0369
4
0,212
0.0369*1.2
6,65
0,217
0.0369*0.8
2,1
0,199
Из таблицы 1 видно, что при увеличении Т1 перерегулирование увеличивается и время регулирования увеличивается. При уменьшении Т1 перерегулирование уменьшается и процесс затягивается вследствие чего время регулирования увеличивается.

Коррекция электромеханической следящей системы в пространстве состояний.
Структурная схема и матрично-векторное описание системы с доступом к переменным состояниям.
Выразим апериодическое звено первого порядка и колебательное звено через интегратор, Gain и сумматор:

Рис7.1 Структурная схема с доступом к переменным состояниям.
![]()
![]()
![]()
![]()
Подберём требуемые корни характеристического уравнения системы в соответствии с заданными показателями качества регулирования.
Задаем уравнение системы в векторно-матричном виде:
>>A=[0 kr 0 0;0 0 1 0;0 -1/(ta*tm) -1/ta kd/(tm*ta);(-220*kpu1*kpu2*ku)/tu -(ktg*kpu2*ku)/tu 0 -1/tu]
>>B=[0;0;0;kpu1*220*kpu2*(ku/tu)]
>>C=[ 1 0 0 0]
>>D=[0]
Выводим график переходного процесса:
>>h=ss(A,B,C,D)
>>step(h)
Проверяем
соответствие выведенного ПП ранее
полученному ПП СС. Так как значения
времени регулирования совпали (![]() =0,825с),
то ПП соответствует ранее полученному.
=0,825с),
то ПП соответствует ранее полученному.

Рисунок 21 –Переходная характеристика следящей системы
Получим корни характеристического уравнения:
>> pole(h)
-12.0192 + 4.8246i
-12.0192 - 4.8246i
-15.7405 +22.9263i
-15.7405 -22.9263i
>> p=[-12.0192*2+4.8246i*2 -12.0192*2-4.8246i*2 -15.7405*2+22.9263i*2 -15.7405*2-22.9263i*2]
Используя zpk-форму, проверяем ПП полученной системы:
>> ht=zpk([],p,1)
>> step(ht)

Рисунок 22
Структурная схема и матрично-векторное описание системы с модальным регулятором.

Формируем матрицу корней модального регулятора:
>> K=acker(A,B,p)
K =
14.9999 0.0089 0.0003 0.0021
>>dA=[0 0 0 0;0 0 0 0;0 0 0 0;-220*K*kpu1*kpu2*(ku/tu)]
>>A1=A+dA
>>B1=B
>>C1=[1 0 0 0]
>>D1=[0]
>>h2=ss(A1,B1,C1,D1)
>>step(h2)

Рисунок 23
Получим ПП всех переменных состояния:
>> h3=augstate(h2)
>> step(h3)

Для получения
![]() =
1 рассчитаем
=
1 рассчитаем![]() :
:
Коэффициент формы
kf
=![]() = 1/0.0625 = 16
= 1/0.0625 = 16

Рисунок 25
После корректировки системы модальным регулятором время регулирования уменьшилось со значения 0,417 до значения 0,173, что в 2.4 раза меньше.