3.5 Опытное определение параметров схемы замещения асинхронной машины.
Расчёт характеристик асинхронной машины будет более достоверным, если в их основу положить параметры схемы замещения, определяемые опытным путём.
Активное
сопротивление обмотки статора ![]() легко измерить ввиду доступности выводов
статора. Остальные параметры асинхронной
машины могут быть определены на основе
несложных опытов холостого хода и
короткого замыкания.
легко измерить ввиду доступности выводов
статора. Остальные параметры асинхронной
машины могут быть определены на основе
несложных опытов холостого хода и
короткого замыкания.
Режим
холостого хода двигателя – это режим
его работы без нагрузки на валу. Скольжение
ротора в этом случае близко к нулю (S=0).
Развиваемый двигателем электромагнитный
момент ![]() преодолевает лишь моменты от сил трения
и момент сопротивления вентилятора,
обдувающего двигатель. По сравнению с
номинальным моментом величина
преодолевает лишь моменты от сил трения
и момент сопротивления вентилятора,
обдувающего двигатель. По сравнению с
номинальным моментом величина ![]() очень мала (
очень мала (![]() ).
Ток ротора в этом режиме тоже близок к
нулю (I/2≈0).
Мощность, потребляемая двигателем из
сети Р10,
переходит
в потери: электрические в статорной
обмотке Рэл1=m1
I02
R1;
в стали статора Рст1
и
механические Рмех:
).
Ток ротора в этом режиме тоже близок к
нулю (I/2≈0).
Мощность, потребляемая двигателем из
сети Р10,
переходит
в потери: электрические в статорной
обмотке Рэл1=m1
I02
R1;
в стали статора Рст1
и
механические Рмех:
Р10 = Рэл1 + Рст1 + Рмех.
Если у трансформатора величина тока холостого хода составляет несколько процентов от номинального, то в асинхронном двигателе – несколько десятков процентов (до 70…80% у многополюсных двигателей небольшой мощности).
Режим холостого хода позволяет определить сумму индуктивных сопротивлений статорной обмотки и намагничивающего контура схемы замещения
а также активное сопротивление намагничивающего контура схемы замещения
В опыте холостой ход измеряют мощность, потребляемую двигателем Р10, ток обмотки статора I0 и напряжение U1, приложенное к ней. Последнее обычно меняют в пределах (0,4…1,2) U1н, если желательно определить параметры х.х. при различных насыщениях магнитной цепи двигателя.
При
известном сопротивление R1
вычисляют мощность Рхх
= Рст1+Рмех
= Р10
– m1I02R1,
а затем строят зависимость ![]() (Рис. 3.11).
(Рис. 3.11).
Поскольку потери в стали пропорциональны квадрату индукции (или квадрату приложенного напряжения), а механические потери остаются при изменении напряжения постоянными, зависимость (Рст1+Рмех) = f(U12) очень близка к прямой. Продолжая на графике эту прямую до пересечения с осью ординат, определяем Рмех. Таким образом определяют суммарные потери в стали Рст1 и механические Рмех, при этом потери в стали могут быть вычислены при любом напряжении.
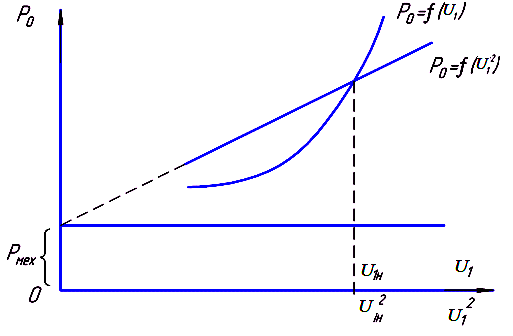
Рисунок 3.11 Зависимость потерь в стали и механических потерь от приложенного напряжения
Режим короткого замыкания асинхронного двигателя возникает в том случае когда ротор заторможен, S = 1. Опыт короткого замыкания проводят при пониженном значении подводимого напряжения U1, так чтобы ток статора I1k находился в пределах (0,25…1,25)I1н. По измеренным величинам напряжения U1, тока статора I1k и потребляемой мощности Р1к находят:
полное сопротивление короткого замыкания
активное сопротивление короткого замыкания
![]() ;
;
индуктивное сопротивление короткого замыкания
![]()
При измеренной величине R1 можно найти значение приведённого активного сопротивления обмотки ротора R21 = Rk - R1. Принимая в режиме опыта к.з.
![]()
![]() находят значение Х1
и
Х2'.
находят значение Х1
и
Х2'.
Из данных опытов холостой ход и короткое замыкание определяют значение индуктивного сопротивления контура намагничивания:
![]() .
.
На рисунке 3.12 показана зависимость I1k = f(U1).
Рисунок 3.12 Зависимость тока статора в режиме короткого замыкания от приложенного напряжения
Эта зависимость, при токах I1k> I1н. Вогнутость начальной части кривой I1k = f(U1) объясняется уменьшением сопротивления Х1 и Х2' вследствие увеличения насыщение зубцовых слоёв возрастающими потоками рассеяния.
Величину тока короткого замыкания при номинальном напряжении, равную величине начального пускового тока двигателя I1кн=I1п определяют по выражению:
![]() ,
,
где
![]() - ток короткого замыкания при наибольшем
напряжении, достигнуто в опыте;
- ток короткого замыкания при наибольшем
напряжении, достигнуто в опыте;
![]() -
смотри рис 3.12.
-
смотри рис 3.12.
Предполагая, что практически отношение токов короткого замыкая пропорционально напряжениям, мощность Р1к пересчитывают пропорционально квадрату напряжений: