

Programma_TMM_zaochniki_mekhaniki
.pdfТаблица 11
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
z1 |
10 |
11 |
12 |
13 |
14 |
15 |
15 |
14 |
13 |
12 |
z2 |
30 |
33 |
36 |
39 |
38 |
40 |
35 |
40 |
36 |
34 |
n1, об/мин |
1500 |
1600 |
1700 |
1800 |
2000 |
1900 |
1800 |
1700 |
1600 |
1500 |
|
|
|
|
|
|
|
|
|
|
|
Вариант 5
Задача 1. Для рычажного механизма (рис. 1, 5) определить количество звеньев, кинематических пар и дать их характеристику. Разложить механизм на группы Ассура, записать формулу строения и определить степень под-
вижности механизма, учитывая пассивные связи и лишние степени свободы,
если они присутствуют. Ведущее звено выделено стрелкой.
Задача 2. Определить кинематические параметры кулисного механизма
(рис. 2, 5; табл. 12) методом планов:
построить планы скоростей и ускорений механизма для одного произ-
вольного положения ведущего (обозначенного стрелкой) звена;
 определить величины и направления угловых скоростей и ускорений звеньев механизма. Направления угловых скоростей и ускорений показать стрелками.
определить величины и направления угловых скоростей и ускорений звеньев механизма. Направления угловых скоростей и ускорений показать стрелками.
Заданы размеры звеньев lAB, lCD, lDE, координаты центров вращения звень-
ев lAC и оси направляющего ползуна h, а также частота вращения ведущего звена n.
Задача 3. В планетарной коробке передач (рис. 2, 5; табл. 13) найти пере-
даточные отношения от колеса 1 к водилу Н2 и частоты вращения водила Н2
при заторможенном водиле Н1, а затем при заторможенном колесе 3'. Заданы числа зубьев колес z1, z2, z3 , z4 и частота вращения n1 колеса 1. Неизвестные значения чисел зубьев определить из условий соосности редуктора, считая,
20
что все колеса нарезаны без смещения и имеют одинаковые модули.
Таблица 12
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
lAB, мм |
10 |
20 |
25 |
5 |
15 |
15 |
10 |
15 |
10 |
30 |
lCD, мм |
45 |
75 |
90 |
25 |
60 |
55 |
50 |
60 |
40 |
100 |
lDE, мм |
30 |
45 |
50 |
15 |
40 |
30 |
35 |
40 |
30 |
70 |
lAC, мм |
25 |
50 |
55 |
15 |
35 |
30 |
25 |
35 |
20 |
65 |
h, мм |
20 |
25 |
35 |
10 |
25 |
25 |
25 |
25 |
20 |
35 |
n, об/мин |
1000 |
500 |
750 |
1600 |
2200 |
1750 |
1500 |
2000 |
800 |
900 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 13 |
|
|
|
|
|
|
|
|
||||
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
z1 |
20 |
17 |
18 |
20 |
18 |
17 |
17 |
24 |
17 |
18 |
z2 |
45 |
30 |
39 |
42 |
38 |
34 |
36 |
36 |
45 |
40 |
z3’ |
17 |
18 |
17 |
18 |
17 |
18 |
18 |
18 |
18 |
17 |
z4 |
45 |
29 |
38 |
42 |
36 |
33 |
36 |
37 |
42 |
39 |
n1, об/мин |
1200 |
800 |
750 |
1000 |
1300 |
750 |
1300 |
2800 |
950 |
1800 |
|
|
|
|
|
|
|
|
|
|
|
Вариант 6
Задача 1. Определить число звеньев, кинематических пар и дать их ха-
рактеристику для плоского механизма, содержащего кулачковый механизм
(рис. 1, 6). Расчленить механизм на группы Ассура, составить формулу строения и определить степень подвижности механизма, учитывая пассивные связи и лишние степени свободы, если они присутствуют. Ведущие звенья выделены стрелками.
Задача 2. Выполнить кинематическое исследование кулисного механиз-
21
ма (рис. 2, 6; табл. 14) методом планов:
построить планы скоростей и ускорений механизма для одного произ-
вольного положения ведущего (обозначенного стрелкой) звена;
найти величины и направления угловых скоростей и ускорений звеньев механизма. Направления угловых скоростей и ускорений показать стрел-
ками.
Заданы размер звена lAB, расстояние между центрами вращения звеньев
lAС и плечо |
h, а также угловая скорость ведущего звена . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры |
|
|
|
Варианты числовых значений |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
|
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
lAB, мм |
|
10 |
20 |
15 |
25 |
50 |
40 |
12 |
|
14 |
35 |
45 |
lAC, мм |
|
50 |
105 |
80 |
130 |
240 |
250 |
65 |
|
70 |
170 |
230 |
h, мм |
|
5 |
11 |
8 |
10 |
15 |
15 |
6 |
|
5 |
15 |
20 |
, рад/с |
|
100 |
75 |
150 |
250 |
300 |
50 |
125 |
|
175 |
75 |
225 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача 3. В дифференциальном редукторе (рис. 3, 6; табл. 15) определить передаточное отношение от входного вала 1 к выходному барабану 3 и ско-
рость вращения барабана, если заданы числа зубьев колес z1 = z2 = z5, z2 = z4 и
скорость вращения вала 1. Неизвестные значения чисел зубьев определить из условий соосности редуктора, принимая, что все колеса нулевые и имеют одинаковые модули.
Таблица 15
Параметры |
|
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
z1 |
15 |
14 |
13 |
|
12 |
11 |
10 |
14 |
10 |
12 |
13 |
z2 |
35 |
32 |
28 |
|
30 |
33 |
25 |
30 |
28 |
26 |
26 |
1, рад/с |
100 |
150 |
75 |
|
200 |
50 |
75 |
125 |
125 |
80 |
120 |
|
|
|
|
|
|
|
|
|
|
|
|
22
Вариант 7
Задача 1. Для механизма, содержащего высшую кинематическую пару
(рис. 1, 7), определить число звеньев, кинематических пар и дать его характе-
ристику. Разложить механизм на группы Ассура, составить формулу строе-
ния и определить степень подвижности механизма с учетом пассивных свя-
зей и лишних степеней свободы при их наличии. Ведущее звено показано стрелкой.
Задача 2. Выполнить кинематическое исследование кулачкового меха-
низма (рис. 2, 7; табл. 16) методом планов:
построить планы скоростей и ускорений механизма для одного произ-
вольного положения ведущего кулачка;
определить величины и направления угловой скорости и углового ус-
корения толкателя. Направления показать стрелками.
Заданы радиус кулачка r, величина эксцентриситета lAC, расположение центров вращения звеньев lAB и частота вращения кулачка n.
Таблица 16
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
r, мм |
25 |
20 |
15 |
35 |
55 |
30 |
12 |
14 |
33 |
45 |
lAC, мм |
10 |
10 |
5 |
30 |
24 |
22 |
6 |
7 |
17 |
23 |
lAB, мм |
110 |
90 |
65 |
150 |
220 |
100 |
50 |
60 |
130 |
200 |
n, об/мин |
500 |
1100 |
800 |
1500 |
1500 |
130 |
6005 |
2500 |
1025 |
2000 |
|
|
|
|
|
|
|
|
|
|
|
У к а з а н и е. Для упрощения решения задачи можно воспользоваться заменяющим механизмом.
Задача 3. Для планетарной коробки передач (рис. 3,7; табл. 17), управ-
ляемой с помощью тормоза Т и муфты М, найти передаточное отношение от входного колеса 1 к водилу Н и угловую скорость водила H в двух случаях:
при включенном тормозе Т и выключенной муфте М; при включенной муфте
23
М и выключенном тормозе Т.
При решении задачи число зубьев колеса 1 определить из условия соос-
ности, считая, что все колеса являются нулевыми.
Таблица 17
Параметры |
|
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
11 |
20 |
16 |
|
11 |
17 |
12 |
15 |
14 |
19 |
21 |
z3 |
12 |
15 |
14 |
|
18 |
16 |
21 |
14 |
28 |
17 |
30 |
1, рад/с |
10 |
15 |
75 |
|
200 |
50 |
75 |
125 |
125 |
80 |
120 |
|
|
|
|
|
|
|
|
|
|
|
|
Вариант 8
Задача 1. Определить число звеньев, кинематических пар и дать характе-
ристику для механизма, содержащего высшую кинематическую пару (рис. 1,
8). Разбить механизм на группы Ассура, составить формулу строения и опре-
делить степень подвижности механизма с учетом пассивных связей и лишних
степеней свободы при их наличии. Ведущее звено выделено стрелкой.
Задача 2. Найти кинематические параметры плоского механизма (рис. 2,
8; табл. 18) методом планов:
построить планы скоростей и ускорений механизма для одного произ-
вольного положения ведущего (показано стрелкой) звена;
найти угловую скорость и угловое ускорение ведомого звена как по ве-
личине, так и по направлению. Направления показать стрелками.
Заданы геометрические параметры звеньев lAB, lCD, координаты центров вращения звеньев lAC и частота вращения ведущего звена n.
Задача 3. Определить для планетарной коробки передач (рис. 3, 8; табл.
19), управляемой с помощью тормоза Т и муфты М, передаточное отношение от колеса 1 к водилу Н и угловую скорость водила Н в двух состояниях:
включен тормоз Т и выключена муфта М; включена муфта М и выключен тормоз Т.
24

Таблица 18
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
lAB, мм |
35 |
20 |
15 |
55 |
50 |
35 |
22 |
24 |
33 |
35 |
lCD, мм |
10 |
10 |
5 |
30 |
24 |
22 |
6 |
7 |
17 |
23 |
lAC, мм |
120 |
90 |
70 |
160 |
200 |
150 |
80 |
100 |
130 |
250 |
n, об/мин |
550 |
1200 |
1800 |
1000 |
2500 |
1300 |
600 |
200 |
1725 |
1200 |
|
|
|
|
|
|
|
|
|
|
|
Необходимое для решения задачи значение числа зубьев колеса 3 (z3) оп-
ределить из условия соосности, считая, что все колеса являются нулевыми.
Таблица 19
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
z1 |
21 |
13 |
14 |
11 |
17 |
18 |
22 |
20 |
15 |
24 |
z2 |
15 |
22 |
16 |
18 |
30 |
25 |
30 |
28 |
24 |
40 |
1,рад/с |
160 |
150 |
200 |
70 |
50 |
75 |
125 |
125 |
80 |
120 |
|
|
|
|
|
|
|
|
|
|
|
Вариант 9
Задача 1. Для плоского механизма, содержащего кулачковый механизм
(рис. 1, 9), определить число звеньев, кинематических пар и дать его характе-
ристику. Разложить механизм на группы Ассура, составить формулу строе-
ния и определить степень подвижности механизма с учетом пассивных свя-
зей и лишних степеней свободы при их наличии. Ведущее звено показано стрелкой.
Задача 2. Выполнить кинематическое исследование кулачкового меха-
низма (рис. 2, 9; табл. 20) методом планов:
построить планы скоростей и ускорений механизма для одного произ-
25

вольного положения кулачка;
определить величины и направления угловой скорости и углового ус-
корения толкателя. Направления показать стрелками.
Заданы радиус кулачка r, величина эксцентриситета lAC, координаты цен-
тров вращения звеньев lAB , величина плеча h и угловая скорость кулачка .
Таблица 20
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
r, мм |
15 |
25 |
45 |
35 |
50 |
35 |
22 |
34 |
37 |
55 |
lAC, мм |
10 |
10 |
5 |
15 |
24 |
22 |
6 |
7 |
17 |
23 |
lAB,мм |
100 |
120 |
200 |
150 |
200 |
120 |
90 |
150 |
130 |
200 |
h,мм |
5 |
11 |
8 |
15 |
10 |
13 |
6 |
25 |
25 |
20 |
, рад/с |
100 |
120 |
75 |
150 |
75 |
80 |
95 |
150 |
70 |
120 |
|
|
|
|
|
|
|
|
|
|
|
У к а з а н и е. Для упрощения задачи следует воспользоваться заменяю-
щим механизмом.
Задача 3. Найти передаточное отношение от колеса 1 к колесу 4 и часто-
ту вращения колеса 4 для планетарного механизма с плавающим водилом Н
(рис. 3, 9; табл. 21). Известны числа зубьев колес z1, z2, z2 и частота враще-
и частота враще-
ния n1 колеса 1. Незаданные значения чисел зубьев определить из условия соосности, считая, что вcе колеса нулевые с одинаковыми модулями.
Таблица 21
Параметры |
|
|
Варианты числовых значений |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
z1 |
21 |
13 |
14 |
12 |
17 |
18 |
26 |
20 |
15 |
16 |
z2 |
24 |
19 |
30 |
20 |
26 |
20 |
32 |
28 |
18 |
22 |
z2’ |
17 |
12 |
26 |
15 |
21 |
16 |
28 |
22 |
14 |
18 |
n1,об/мин |
1200 |
400 |
900 |
600 |
750 |
1600 |
3000 |
250 |
750 |
1000 |
|
|
|
|
|
|
|
|
|
|
|
26
2.8.2.Указания к выполнению контрольной работы № 1
Кзадаче 1. Структурное разложение механизма проводится следующим образом. Из числа звеньев, наиболее удаленных от начальных, необходимо попытаться выделить группу Ассура второго класса. При этом должна со-
храняться замкнутость кинематической цепи. При отсутствии такой возмож-
ности проводится поиск групп более высокого класса. Разбивка оставшейся части механизма осуществляется аналогичным образом. После выделения всех групп Ассура должны остаться начальные механизмы первого класса.
Следует помнить, что каждое звено и любая кинематическая пара могут вхо-
дить в состав только одной группы.
К задаче 2. Здесь необходимо обратить особое внимание на наличие ус-
корения Кориолиса.
К задаче 3. Исследование зубчатого механизма целесообразно начинать с выяснения его структуры. Необходимо, прежде всего, в механизме выделить дифференциальную часть. Затем, пользуясь методом обращения движения
(методом Виллиса), составляется соотношение, связывающее скорости звеньев дифференциальной части механизма и соотношение для скорости замыкающей передачи. Из этих соотношений можно получить выражение для искомого передаточного отношения замкнутого дифференциального ме-
ханизма. Все зубчатые колеса, используемые в передачах, являются цилинд-
рическими, прямозубыми и эвольвентными. Нулевыми являются зубчатые колеса, изготовленные без смещения.
Условия задач, пояснения к решениям, все графические построения, не-
обходимые уравнения и расчеты приводятся в пояснительной записке.
Примеры решения задач и оформления представлены в учебном пособии
[1], которое входит в комплекс методических указаний по курсу “Теория ме-
ханизмов и машин”, предназначенных для студентов ИДО.
Прошедшие рецензирование и зачтенные контрольные работы студент обязан предъявить на экзамене для собеседования.
27
2.8.3. Контрольная работа № 2. Уравновешивание механизмов и исследо-
вание движения механизма под действи-
ем приложенных сил
Данная контрольная работа состоит из двух задач. В первой задаче проводится динамическая балансировка ротора и статическое уравновешивание плоского механизма, во второй  выполняется анализ уравнения движения механизма.
выполняется анализ уравнения движения механизма.
Вариант задания выбирается, как при решении контрольной работы № 1.
Вариант 0
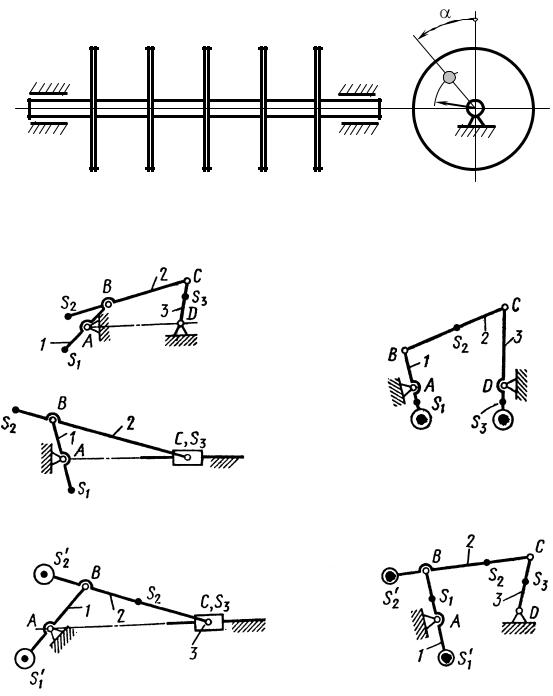
Задача 1. На валу перпендикулярно к его оси размещены неподвижно пять дисков на одинаковом расстоянии друг от друга (рис.4, 0; табл. 22). Диаметры дисков равны D. На трех дисках установлены неуравновешенные
массы mn с координатами центров масс n и rn, где n порядковый номер диска. Определить наименьшие корректирующие массы mk, ml и координаты их центров k, rk, l, rl, устанавливаемые на свободных дисках k и l, для динамической балансировки системы.
Задача 2. При закрытом распределителе 4 гидропривода (рис. 5, 0; табл. 23) вся жидкость, подаваемая насосом 1, сливается через переливной клапан
2 в сливной бак. После мгновенного открытия распределителя поршень гидродвигателя 3 получает возможность перемещаться. Количество жидкости, сливаемой через переливной клапан, уменьшается, а поступающей в гидродвигатель – увеличивается. Происходит разгон поршня. Определить время разгона поршня и его установившуюся скорость, если зависимость между давлением на выходе насоса рн и скоростью поршня , определяемая статиче-
ской характеристикой насосной установки, имеет вид рн = рк |
Ак ; давление р1 |
в напорной полости меньше рн на p A1v B1v2 ; давление |
p2 в сливной по- |
28
0 |
|
|
|
|
n |
|
1 |
2 |
3 |
4 |
5 |
||
|
||||||
|
|
|
|
|
mn |
|
|
|
|
|
|
rn |
1
4
2
3 |
5 |
|
Рис. 4. Уравновешивание механизмов
29