

2 ТАУ лабораторная
.docМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Институт – ЭНИН
Направление – Теплоэнергетика и теплотехника
Кафедра – Автоматизация теплоэнергетических процессов
Лабораторная работа № 2
по дисциплине «Теория автоматического управления»
ТУТ КОРОЧЕ ТЕМА ЛАБЫ
ВАРИАНТ 1
Выполнил студент гр.5Б1В _____ _____ А. О. Опарин
Руководитель _____ _____ В. С. Андык
Томск – 2014
Цель работы: изучить корневой метод расчета параметров настройки типовых регуляторов, получить практический навык расчета параметров настройки регуляторов на ЭВМ.
Используемые в работе программы: RAF1S (RAF1D) или RAF2S, RAF3S.
Исходные данные:
Таблица 1 – Исходные данные
|
К |
T0 |
T1 |
T2 |
T3 |
|
m
|
|
1 |
3 |
10 |
20 |
30 |
5 |
0.25 (0.79) |
Постановка задачи:
1. Для системы вида
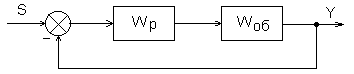
где
![]() ;
;
![]()
определить на ЭВМ параметры настройки
типовых регуляторов (П, И, ПИ), резонансную
частоту системы
![]() .
.
2. Для каждого из типов регуляторов рассчитать переходный процесс на выходе системы по каналу задающего воздействия.
3. В одних осях координат построить на миллиметровке графики переходных процессов для всех рассматриваемых типов регуляторов, сделать оценку прямых критериев качества переходных процессов, свести полученные оценки в таблицу для всех типов регуляторов.
4. На основе таблицы оценок качества сделать выводы о достоинствах и недостатках каждого типового регулятора, сравнить заданные критерии с расчетными, сделать вывод о связи прямых критериев качества со значением резонансной частоты системы.
1. Определим на ЭВМ параметры настройки
ПИ-регулятора, резонансную частоту
системы
![]() и
переходный процесс на выходе системы
по каналу задающего воздействия.
и
переходный процесс на выходе системы
по каналу задающего воздействия.
Из таблицы 2, полученной при расчете на ЭВМ с помощью программы RAF1S, найдем параметры настройки типовых регуляторов (П, И, ПИ), резонансную частоту системы.
Таблица 2 - Значения частоты, Re и Im, параметры настройки регулирования Кр/Ти и Кр
|
w |
Reоб(m,w) |
Imоб(m,w) |
Kp/Tu |
Kp |
|
0,019 |
0,355601 |
-0,96674 |
1,84E-02 |
-0,10736 |
|
0,02 |
0,292057 |
-0,97425 |
2,00E-02 |
-4,69E-02 |
|
0,021 |
0,229432 |
-0,97651 |
2,17E-02 |
1,46E-02 |
|
0,022 |
0,168217 |
-0,97378 |
0,023309 |
7,70E-02 |
|
0,023 |
0,10885 |
-0,96639 |
2,50E-02 |
0,140361 |
|
0,024 |
0,051705 |
-0,9547 |
2,66E-02 |
0,204533 |
|
0,025 |
-2,90E-03 |
-0,93909 |
2,83E-02 |
0,2695 |
|
0,026 |
-5,47E-02 |
-0,91995 |
2,99E-02 |
0,33521 |
|
0,027 |
-0,10352 |
-0,89768 |
3,15E-02 |
0,401612 |
|
0,028 |
-0,14918 |
-0,8727 |
3,31E-02 |
0,468656 |
|
0,029 |
-0,19162 |
-0,84538 |
3,47E-02 |
0,536289 |
|
0,03 |
-0,23076 |
-0,81612 |
3,62E-02 |
0,604462 |
|
0,031 |
-0,26661 |
-0,78527 |
3,76E-02 |
0,673122 |
|
0,032 |
-0,2992 |
-0,75318 |
3,90E-02 |
0,74222 |
|
0,033 |
-0,32858 |
-0,72017 |
4,03E-02 |
0,811703 |
|
0,034 |
-0,35483 |
-0,68652 |
4,15E-02 |
0,88152 |
|
0,035 |
-0,37806 |
-0,65251 |
4,27E-02 |
0,951621 |
|
0,036 |
-0,3984 |
-0,61838 |
0,043711 |
1,021954 |
|
0,037 |
-0,41598 |
-0,58434 |
4,46E-02 |
1,092468 |
|
0,038 |
-0,43095 |
-0,55058 |
4,55E-02 |
1,163112 |
|
0,039 |
-0,44345 |
-0,51727 |
4,62E-02 |
1,233835 |
|
0,04 |
-0,45364 |
-0,48455 |
4,67E-02 |
1,304586 |
|
0,041 |
-0,46169 |
-0,45255 |
4,72E-02 |
1,375314 |
|
0,042 |
-0,46774 |
-0,42137 |
4,74E-02 |
1,445969 |
|
0,043 |
-0,47194 |
-0,39108 |
0,047561 |
1,516498 |
|
0,044 |
-0,47446 |
-0,36177 |
4,75E-02 |
1,586852 |
|
0,045 |
-0,47543 |
-0,33347 |
4,73E-02 |
1,65698 |
|
0,046 |
-0,475 |
-0,30624 |
4,69E-02 |
1,726831 |
|
0,047 |
-0,47329 |
-0,28009 |
4,62E-02 |
1,796354 |
|
0,048 |
-0,47043 |
-0,25505 |
4,54E-02 |
1,865499 |
|
0,049 |
-0,46655 |
-0,23111 |
4,44E-02 |
1,934216 |
|
0,05 |
-0,46175 |
-0,20828 |
4,31E-02 |
2,002454 |
|
0,051 |
-0,45614 |
-0,18656 |
4,16E-02 |
2,070163 |
|
0,052 |
-0,44983 |
-0,16592 |
3,99E-02 |
2,137293 |
Продолжение таблицы 2
|
0,053 |
-0,44289 |
-0,14635 |
3,79E-02 |
2,203793 |
|
0,054 |
-0,43541 |
-0,12783 |
3,56E-02 |
2,269614 |
|
0,055 |
-0,42748 |
-0,11032 |
3,31E-02 |
2,334706 |
|
0,056 |
-0,41916 |
-0,09381 |
3,03E-02 |
2,399019 |
|
0,057 |
-0,41053 |
-7,83E-02 |
2,71E-02 |
2,462504 |
|
0,058 |
-0,40163 |
-6,36E-02 |
2,37E-02 |
2,525111 |
|
0,059 |
-0,39252 |
-4,99E-02 |
2,00E-02 |
2,586792 |
|
0,06 |
-0,38326 |
-3,70E-02 |
1,59E-02 |
2,647496 |
|
0,061 |
-0,37389 |
-0,02495 |
1,15E-02 |
2,707174 |
|
0,062 |
-0,36444 |
-1,37E-02 |
6,77E-03 |
2,765779 |
|
0,063 |
-0,35496 |
-3,15E-03 |
1,68E-03 |
2,82326 |
|
0,064 |
-0,34548 |
6,65E-03 |
-3,79E-03 |
2,87957 |
|
0,065 |
-0,33602 |
1,58E-02 |
-9,62E-03 |
2,93466 |
|
0,066 |
-0,32661 |
2,42E-02 |
-1,58E-02 |
2,988482 |
|
0,067 |
-0,31728 |
3,21E-02 |
-2,25E-02 |
3,040988 |
|
0,068 |
-0,30804 |
3,94E-02 |
-2,95E-02 |
3,09213 |
|
0,069 |
-0,29891 |
4,61E-02 |
-3,69E-02 |
3,14186 |
Для ПИ регулятора:
КР/ТИ = 0,047561 [1/c];
КР = 1,516498;
![]() = 0,043 [c-1]
.
= 0,043 [c-1]
.
Для И регулятора:
КР/ТИ = 0,021600 [1/c];
![]() = 0,021 [c-1] .
= 0,021 [c-1] .
Для П регулятора:
КР = 2,833570;
![]() = 0,063 [c-1].
= 0,063 [c-1].
2. Для каждого из типов регуляторов рассчитаем переходный процесс на выходе системы по каналу задающего воздействия.
Для ПИ регулятора:
Результаты расчетов сведены в таблицу 3, график переходного процесса для ПИ регулятора изображен на рисунке 1.
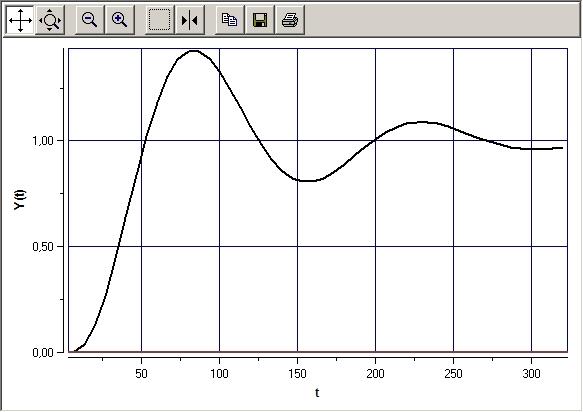
Рисунок 1 – переходный процесс ПИ – регулятора
Таблица 3 – значения времени и
ординаты для переходного процесса
ПИ – регулятора
|
время |
ордината |
|
0 |
0 |
|
20 |
0,124368 |
|
40 |
0,638628 |
|
60 |
1,180148 |
|
80 |
1,422604 |
|
100 |
1,326993 |
|
120 |
1,068975 |
|
140 |
0,859531 |
|
160 |
0,807161 |
|
180 |
0,888435 |
|
200 |
1,007903 |
|
220 |
1,08084 |
|
240 |
1,080037 |
|
260 |
1,031635 |
|
280 |
0,981182 |
|
300 |
0,959679 |
|
320 |
0,969804 |
Для И регулятора:
Результаты расчетов сведены в таблицу 4, график переходного процесса для И регулятора изображен на рисунке 2.
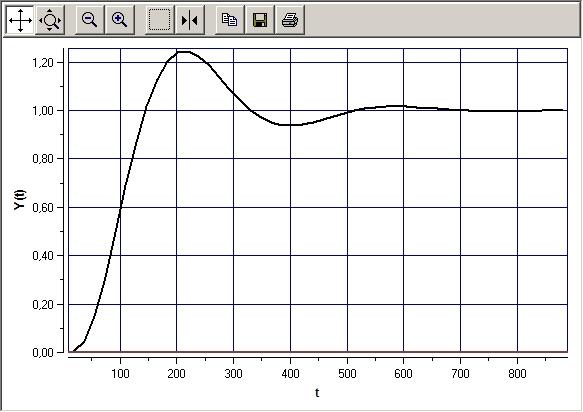
Рисунок 2 – переходный процесс И - регулятора
Таблица 4 – значения времени и
ординаты для переходного процесса
И - регулятора
|
время |
ордината |
|
0 |
0 |
|
55 |
0,150421 |
|
110 |
0,688755 |
|
165 |
1,129815 |
|
220 |
1,244117 |
|
275 |
1,137806 |
|
330 |
1,00108 |
|
385 |
0,938943 |
|
440 |
0,95046 |
|
495 |
0,987616 |
|
550 |
1,012335 |
|
605 |
1,015432 |
|
660 |
1,006822 |
|
715 |
0,998538 |
|
770 |
0,995843 |
|
825 |
0,997396 |
|
880 |
0,999804 |
Для П регулятора:
Результаты расчетов сведены в таблицу 5, график переходного процесса для П регулятора изображен на рисунке 3.
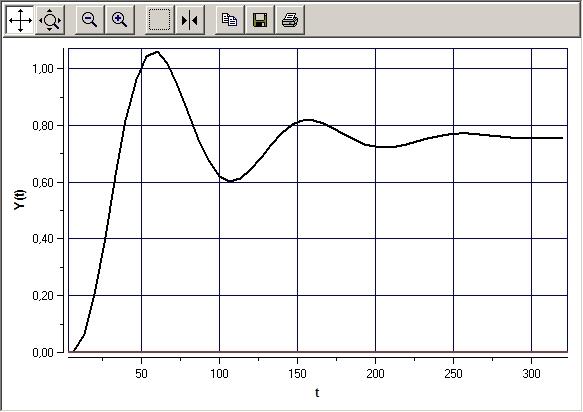
Рисунок 3 – переходный процесс И - регулятора
Таблица 5 – значения времени и
ординаты для переходного процесса
П - регулятора
|
время |
ордината |
|
0 |
0 |
|
20 |
0,204458 |
|
40 |
0,816742 |
|
60 |
1,060587 |
|
80 |
0,843187 |
|
100 |
0,621287 |
|
120 |
0,643502 |
|
140 |
0,772524 |
|
160 |
0,817679 |
|
180 |
0,7697 |
|
200 |
0,725831 |
|
220 |
0,733896 |
|
240 |
0,762446 |
|
260 |
0,771521 |
|
280 |
0,761326 |
|
300 |
0,753642 |
|
320 |
0,757011 |
3. Найдём оценки прямых критериев качества переходных процессов для каждого регулятора, и сведем полученные результаты в таблицу 6.
Для ПИ регулятора
Из таблицы 3 и по рисунку 1 найдем:
Максимальную динамическую ошибку
А1 = 0,422604; А2 = 0,08084; Y(∞) = 1.
Перерегулирование:
σ = (А1/Y(∞))*100 = (0,422604/1)*100 = 42,26 %.
Статическая ошибка:
εСТ = S(t) – Y(∞) = 1- 1 = 0.
Степень затухания:
Ψ = (А1 - А2)/А1 = (0,422604 – 0,08084)/ 0,422604 = 0,81.
Время регулирования:
tP = 325 с.
Для И регулятора
из таблицы 4 и по рисунку 2 найдем:
Максимальную динамическую ошибку:
А1 = 0,244117; А2 = 0,015432; Y(∞) = 1.
Перерегулирование:
σ = (А1/Y(∞))*100 = (0,244117/1)*100 = 24,41 %.
Статическая ошибка:
εСТ = S(t) – Y(∞) = 1- 1 = 0.
Степень затухания:
Ψ = (А1 - А2)/А1 = (0,244117 – 0,015432)/ 0,244117 = 0,94 %.
Время регулирования:
tP = 441 с.
Для П регулятора
из таблицы 5 и по рисунку 3 найдем:
Максимальную динамическую ошибку
А1 = 0,303587; А2 = 0,060679; Y(∞) = 0,757;
Перерегулирование:
σ = (А1/Y(∞))*100 = (0,303587/0,757)*100 = 40,10 %
Статическая ошибка:
εСТ = S(t) – Y(∞) = 1 - 0,757= 0,243.
Степень затухания:
Ψ = (А1 - А2)/А1 = (0,303587 – 0,060679)/ 0,303587= 0,80.
Время регулирования:
tP = 170 с.
Сведём значения прямых критериев качества переходных процессов для ПИ, И, П регуляторов в таблицу 6.
Таблица 6 – значения прямых критериев качества переходных процессов для ПИ, И, П регуляторов
|
Тип регулятора |
Перерегули-рованиее σ % |
Статическая ошибка ε |
Степень затухания ψ |
Время ре- гулирова- ния tP |
max динамич. ошибка А1 |
|
ПИ |
42,26 |
0 |
0,81 |
325 |
0,42 |
|
И |
24,41 |
0 |
0,94 |
441 |
0,24 |
|
П |
40,10 |
0,243 |
0,80 |
170 |
0,30 |
4. На основе таблицы оценок качества сделать выводы о достоинствах и недостатках каждого типового регулятора, сравнить заданные критерии с расчетными, сделать вывод о связи прямых критериев качества со значением резонансной частоты системы.
На основе таблицы оценок качества можно делаем вывод, что ПИ- регулятор обладает такими положительными качествами как сравнительно малое время регулирования, отсутствием статической ошибки, к недостаткам же можно отнести: малую степень затухания и сравнительно большую динамическую ошибку. И-регулятор обладает такими положительными качествами как отсутствие статической ошибки и большая степень затухания, недостатками является большое время регулирования и большая динамическая ошибка. П-регулятор обладает хорошим показателем степени затухания, времени регулирования и малой величиной максимальной динамической ошибки, недостаток его заключаются в наличии статической ошибки.