

Федеральное агентство морского и речного транспорта
ФГБОУ ВПО «Новосибирская государственная академия водного транспорта»
Кафедра «Судовождение»
Отчет по практике
за 3 курс
Выполнил: Хабибулин В.В.
Проверил: Дмитров В.Е.
Новосибирск 2014
Содержание.
Судно…………………………………………………………………3
Авторулевой механизм……………………………………………...4
Перечень судовых радионавигационных средств с указанием основных технических характеристик……………………………..6
Мореходная атрономия……………………………………………..12
Швартовные работы………………………………………………...12
Постановка на якорь………………………………………………...17
Управление судном………………………………………………….17
1. Судно.

Рисунок 1.
Бразерс-7
Тип: Ленанефть
Проект №621
|
Валовая вместимость |
2861 т |
|
Чистая вместимость |
858 т |
|
Дедвейт |
3045 т |
|
Водоизмещение |
3680 т |
|
Длина габаритная |
122,75 м |
|
Длина конструктивная |
117,8 м |
|
Ширина габаритная |
15,3 м |
|
Ширина конструктивная |
14,8 м |
|
Высота борта |
5,2 м |
|
Осадка судна |
2,5 м |
|
Запасы топлива (т) |
118 т |
|
Водяной балласт (т) |
1985 т |
|
Надводный борт |
2,18 м |
2. Авторулевой механизм.
На этом судне установлен авторулевой «Печора».Рассмотрим его.
Авторулевой «Печора» предназначен для стабилизации судна на заданном курсе, изменения курса с заданной угловой скоростью; устанавливаются на судах внутреннего и смешанного плавания. Авторулевые обеспечивают разные режимы работы (виды управления). Например, авторулевой «Печора» выполняет семь видов управления: «Автомат», «Циркуляция», «Следящий», «Следящий синхронно», «Следящий раздельно», «Простой», «Ручной».
Каждый тип авторулевых имеет определённое количество модификаций, имеющих свой индекс и отличающихся входящими в состав системы приборами.
Рассмотрим упрощенную структурную схему авторулевого при виде управления «Автомат», представленную на рисунке 2. Чувствительным элементом системы является гирокомпас ГК. Он измеряет истинный курс
судна и через синхронную передачу передаёт угол поворота судна по курсу в авторулевой.
Сельсин-приёмник
СП курса через необратимую передачу НП
поворачивает вал механического
дифференциала МД. На второй вал МД от
штурвала подаётся заданное значение
курса аз.
На выходном третьем валу МД получается
разность между заданным и истинным
значением курса, т. е. угол а.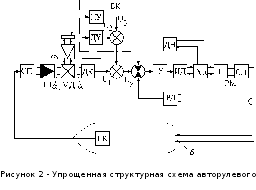
Выходной вал МД поворачивает датчик курса ДК, который вырабатывает сигнал, пропорциональный углу рассогласования судна по курсу
U1 = aia
, где a1 – коэффициент передачи ДК.
Этот сигнал подаётся на вход усилителя У. Дифференцирующим ДУ и интегрирующим ИУ устройствами вырабатываются дополнительные сигналы соответственно пропорциональные скорости отклонения судна от заданного курса и интеграла от угла отклонения судна
U 2 = a2* da /dt ; a3*∫ adt
Таким образом на входе У суммируются три сигнала
U1 + U2 + U3 = Uу
Усилитель У, исполнительный двигатель ИД, рулевая машина РМ, датчик насоса ДН от ИД и рулевого датчика РД образуют следящий рулевой привод, который поворачивает руль судна на угол, пропорциональный суммарному входному сигналу Uy, поступающему на вход усилителя. В нём этот сигнал усиливается. Напряжение с У поступает на ИД, поворачивающий управляющий орган насоса РМ. При этом на вход У подаётся сигнал отрицательной обратной связи, вырабатываемый ДН. Этот сигнал вычитается из управляющего сигнала У. Когда величина отрицательной обратной связи станет равной управляющему сигналу на входе У, разность напряжений станет равной нулю, а, следовательно, и напряжение, подаваемое на ИД, тоже станет равным нулю. Исполнительный двигатель ИД остановится, а управляющий орган насоса повернётся на определённый угол. Насос РМ в соответствии с положением управляющего органа приведёт в движение поршни силового цилиндра СЦ рулевой машины, которые будут поворачивать руль судна с определённой скоростью.
При повороте руля на вход усилителя подаётся сигнал отрицательной обратной связи, вырабатываемый рулевым датчиком РД. Он также вычитается из управляющего сигнала усилителя. Поскольку в рассматриваемый момент разность сигналов на усилителе была равна нулю, то под действием сигнала от РД усилитель будет вырабатывать напряжение противоположной фазы, ИД будет вращаться в обратную сторону и перемещать управляющий орган насоса Н к нулевому положению, при этом сигнал обратной связи датчика насоса ДН будет соответственно уменьшаться. Когда управляющий орган Н вернётся в нулевое положение, РМ прекратит движение, руль остановится в определённом положении, сигнал ДН будет равен нулю, сигнал РД станет равным по величине управляющему напряжению и противоположен по знаку. Разность сигналов на входе У опять будет равна нулю. При этом положение руля определяется величиной поступившего управляющего сигнала и коэффициента передачи КОС (коэффициента обратной связи) датчика РД обратной связи по рулю. КОС – это отношение величины угла отклонения судна от заданного курса к величине угла перекладки руля при отключённом сигнале производной, т. е. КОС равен а/в. Чем меньше КОС, тем на больший угол необходимо повернуть руль, чтобы выработать напряжение обратной связи, равное управляющему напряжению, то есть наблюдается обратно пропорциональная зависимость. Опытные данные показывают, что при уменьшении КОС судно быстрее отрабатывает заданное значение поправки к курсу, но при этом увеличивается перерегулирование и число колебаний судна. Настройка системы управления осуществляется при испытании на стендах и в эксплуатационных условиях.