

14.10. Схема замещения фазы асинхронного двигателя
Для расчетов рабочих процессов асинхронного двигателя часто используется схема замещения фазы двигателя, состоящая из резистивных и индуктивных элементов с постоянными параметрами, а также резистивного элемента с переменным сопротивлением, замещающим механическую нагрузку на валу двигателя.
Для обоснования такой схемы замещения преобразуем соответствующим образом основные уравнения состояния двигателя. Для этого все роторные величины приведем к числу витков, обмоточному коэффициенту и числу фаз статора подобно тому, как мы приводили к числу витков первичной обмотки трансформатора величины, относящиеся ко вторичной обмотке (см. § 8.5). Асинхронный двигатель является трехфазным устройством, но его фазы симметричны, поэтому достаточно составить схему замещения для одной фазы.
Электродвижущая сила фазы статора Е1 связана с ЭДС фазы неподвижного эквивалентного ротора Е2н соотношением
Е1 = (w1ko61/w2ko62) Ег н = keE2 H,
где ke — коэффициент трансформации напряжений асинхронной машины.
Согласно векторной диаграмме фазы двигателя (рис. 14.18)
—![]() 2н
=(
2н
=(![]() +j
+j![]() Lрас2)
Lрас2)
![]() 2
= (rВ2
+ r2
+j
2
= (rВ2
+ r2
+j![]() Lpac2)
Lpac2)
![]() 2
= Zo62
2
= Zo62![]() 2
+ г2
2
+ г2![]() 2.
2.
Следовательно,
—![]() 1
= (Zo62
+ r2)ke
1
= (Zo62
+ r2)ke![]() 2.
2.
Ток фазы ротора
![]() 2
можно заменить приведенным током:
2
можно заменить приведенным током:
![]() 2=
(Зw1kоб1/m2w2kоб2)
2=
(Зw1kоб1/m2w2kоб2)
![]() ’2
= ki
’2
= ki![]() ’2
’2
где ki — коэффициент трансформации токов асинхронной машины. Сделав подстановку, получим:
![]() 1
=
— (Zo6
2
+ r2)
keki
1
=
— (Zo6
2
+ r2)
keki![]() ’2.
’2.
Произведение keki = k есть коэффициент трансформации асинхронной машины.
Введем теперь в уравнения электрического состояния фазы статора асинхронного двигателя приведенные сопротивления цепи ротора:
keki Zоб2 = Z’0б2 И keki r2 = r’2.
Элементы с такими сопротивлениями в цепи фазы статора будут потреблять такую же энергию и при том же сдвиге фаз между током и напряжением, как это имеет место в соответствующих сопротивлениях элементов цепи фазы ротора по схеме на рис. 14.17.
Таким образом, ЭДС фазы статора равна:
![]() 1
=
-
(Z’об2
+
r’2)
1
=
-
(Z’об2
+
r’2)
![]() ’2
’2
а напряжение статора (фазное)
![]() 1
=
(-
1
=
(-![]() 1
)
+ Zo61
1
)
+ Zo61![]() 1
= Zo61
1
= Zo61![]() 1
+ (Zo62
+
r’2)
1
+ (Zo62
+
r’2)
![]() ’2. (14.18)
’2. (14.18)
С
другой стороны, ЭДС![]() 1
пропорциональна намагничивающему току
1
пропорциональна намагничивающему току
![]() 1x
и по тем же соображениям, как и для
трансформатора, напряжение
1x
и по тем же соображениям, как и для
трансформатора, напряжение
(—![]() 1)
= Z12
1)
= Z12![]() 1x,
1x,
где условная величина Z12, модуль которой имеет размерность сопротивления, в эквивалентной схеме замещения соответствует магнитной цепи двигателя. Следовательно, для напряжения фазы статора справедливо также второе уравнение
![]() 1
=
Z0б1
1
=
Z0б1
![]() 1
+
Z12
1
+
Z12
![]() 1х. (14.19)
1х. (14.19)
Вместе с уравнением тока статора
![]() 1
=
1
=![]() 1х
+
1х
+![]() ’2 (14.20)
’2 (14.20)
два уравнения напряжения фазы статора (14.18) и (14.19) можно рассматривать как уравнения, соответствующие законам Кирхгофа для цепи на рис. 14.19. В ней элементы Zo61 изображают схему замещения обмотки фазы статора, Z’qб2 — обмотки фазы ротора, Z12 — магнитную цепь машины, a r'2 — механическую нагрузку.
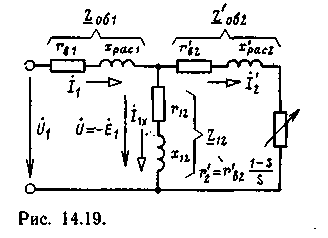
Уточним,
что ток
![]() 1х
является током
фазы статора идеального
холостого
хода двигателя,
т. е. это ток двигателя
в условиях, когда ток в роторе отсутствует
(I2
= 0). Ток 11x
можно
измерить,
если посредством внешнего двигателя
довести ротор до синхронной
частоты вращения (s
= 0).
1х
является током
фазы статора идеального
холостого
хода двигателя,
т. е. это ток двигателя
в условиях, когда ток в роторе отсутствует
(I2
= 0). Ток 11x
можно
измерить,
если посредством внешнего двигателя
довести ротор до синхронной
частоты вращения (s
= 0).
При такой синхронной частоте вращения сопротивление резистивного элемента, соответствующего механической нагрузке в эквивалентной схеме замещения, равно (14.16):
r'2
= r'B2/s
— r'B2
=
r'B2
(1 — s)/s =![]() .
.
Если затормозить двигатель до полной остановки, то s = 1 и, следовательно,
r'2= 0.
По этой причине опыт полной остановки двигателя именуется опытом короткого замыкания — обычно он осуществляется при сильно пониженном напряжении на статоре.