

Лекция 9 Кинетическая энергия вращающегося тела
Когда тело вращается вокруг неподвижной оси с угловой скоростью , элементарная масса mi, отстоящая от оси вращения на расстояние Ri, обладает скоростью vi=Ri.Следовательно, ее кинетическая энергия равна
(Еk)i=![]()
Сумма энергий (Еk)I дает кинетическую энергию всего тела:
Ек=![]()
Приняв во внимание формулу (8.16) , придем к выражению
Ек=![]() I2.
(9.1)
I2.
(9.1)
Это выражение аналогично выражению для кинетической энергии материальной точки (и поступательно движущегося тела): Ек=mv2/2. Роль массы играет момент инерции, а роль линейной скорости – угловая скорость.
Н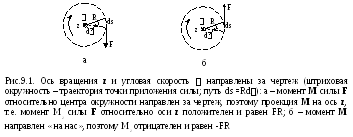 айдем
работу, совершаемую внешней силой при
вращении тела. Рассмотрим частный
случай, когда сила направлена по
касательной к окружности, по которой
движется точка приложения силы (рис.9.1).
В этом случае силаF
и перемещение ds
точки ее приложения коллинеарны.
Элементарная работа dA=Fsds=FsRd.
В случае а на рис. 9.1 сила действует в
направлении перемещения, поэтому Fs
равна модулю силы F
и dA=FRd.
В случае б сила и перемещение направлены
в противоположные стороны, поэтому
Fs=-F
и dA=-FRd.
Как следует из рисунка, оба выражения
для работы можно представить одной
формулой
айдем
работу, совершаемую внешней силой при
вращении тела. Рассмотрим частный
случай, когда сила направлена по
касательной к окружности, по которой
движется точка приложения силы (рис.9.1).
В этом случае силаF
и перемещение ds
точки ее приложения коллинеарны.
Элементарная работа dA=Fsds=FsRd.
В случае а на рис. 9.1 сила действует в
направлении перемещения, поэтому Fs
равна модулю силы F
и dA=FRd.
В случае б сила и перемещение направлены
в противоположные стороны, поэтому
Fs=-F
и dA=-FRd.
Как следует из рисунка, оба выражения
для работы можно представить одной
формулой
dA=Mzd (9.2)
В общем случае, когда внешняя сила направлена произвольно, ее можно разложить на три составляющих. Составляющие FII и F перпендикулярны к перемещению ds и поэтому работы не совершают. Они также не вносят вклада в Мz. Следовательно, и в этом случае работа определяется формулой (9.2).
Поскольку направление оси z и вектора совпадают, формулу (9.2) можно представить в виде
dA=Md (9.3)
где M - проекция М на направление вектора .
Формула (9.3) сходна с формулой dA=Fsds. Сходство становится особенно наглядным, если написать последнюю формулу в виде dA=Fvds, где Fv – проекция силы F на направление скорости v точки приложения силы ( направления векторов v и ds совпадают).
Разделив работу (9.3) на время dt, за которое тело повернулось на угол d, получим мощность, развиваемую силой F:
P=dA/dt=M . (9.4)
Знак мощности зависит от взаимного направления векторов М и . Если эти векторы направлены в противоположные стороны, M< 0 и мощность отрицательна.
Формула (9.4) сходна с формулой Р=Fv=Fvv.
Таблица 9.1
|
Поступательное движение |
Вращение |
|
v– линейная скорость а= m –масса p=mv – импульс F- сила dp/dt=F – уравнение движения ma=F – уравнение движения Ек=mv2/2 – кинетическая энергия dA=Fsds=Fvds – работа P=Fvv -мощность |
- угловая скорость = I – момент инерции Lz=I - момент импульса М – момент силы dL/dt=M – уравнение движения Iz=Mz – уравнение движения Ек=I2/2 – кинетическая энергия dA=Md - работа Р= M - мощность |
В таблице 9.1 сопоставлены формулы механики поступательного движения и вращения вокруг неподвижной оси. Из этого сопоставления следует, что во всех случаях роль линейной скорости играет угловая скорость, роль линейного ускорения – угловое ускорение, роль массы – момент инерции, роль импульса – момент импульса, силы – момент силы.