

Lektsii_po_kinematike
.pdffelix, стр. 11
2 ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Различают пять видов движения твердого тела:
-поступательное;
-вращательное;
-плоскопараллельное (плоское);
-сферическое;
-общий случай движения твердого тела.
Из них простейшими являются поступательное и вращательное.
2.1 Поступательное движение твердого тела Поступательное движение – движение, при котором любая прямая, прове-
денная в теле остается параллельной своему первоначальному положению.
Поступательное движение ха-
рактеризуется:
- линейным перемещением ( s , r ); - скоростью ( );
- ускорением ( a ).
Теорема. Все точки твердого тела, движущегося поступательно,
описывают одинаковые траектории и в каждый момент времени имеют
геометрически равные скорости и ускорения.
[Проведем из произвольного неподвижного центра O в точки A , B , A1 , B1
радиус-векторы rA , rB , rA1 , rB1 . Из OAB устанавливаем равенство]
rB rA AB ,
[которое будет справедливым во все время движения тела.]
[Определим вектор скорости точки B , как производную от радиус-вектора этой точки по времени:]

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
felix, стр. 12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
drB |
|
drA |
|
d AB |
. |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
dt |
dt |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d AB |
0 , тогда |
|||
Т.к. вектор AB постоянен по величине и направлению, то |
||||||||||||||||||||||||||||||||||||
dt |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
drB |
|
drA |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
B |
|
A |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
[т.е. скорости точек A и B геометрически равны.] |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
[Определим вектор ускорения точки B , как производную от вектора скоро- |
||||||||||||||||||||||||||||||||||||
сти этой точки по времени:] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
d |
B |
|
d A |
|
a a |
|
|
, |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
A |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
[т.е. ускорения точек A и B геометрически равны.]
[Установленные свойства позволяют свести изучение поступательного дви-
жения твердого тела к изучению движения отдельной точки этого тела, т.е. к за-
даче кинематики точки. Обычно рассматривают движение центра тяжести этого тела.]
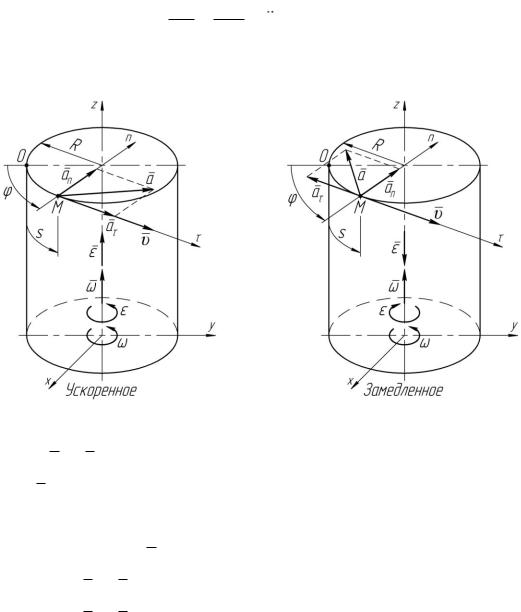
2.2 Вращательное движение твердого тела
Вращательное движение – такое движение, при котором все точки тела,
лежащие на некоторой прямой, неизменно связанной с телом, называемой осью
вращения, остаются неподвижными в рассматриваемой системе отсчета.
При этом движении все остальные точки тела движутся в плоскостях пер-
пендикулярных оси вращения, и описывают окружности, центры которых лежат
на этой оси.
Вращательное движение задается углом поворота в функции времени t :
|
|
f t ; |
|
|
||
так же оно характеризуется: |
|
|
|
|
||
- угловой скоростью |
d |
, т.е. величиной, характеризующей изменение |
||||
dt |
||||||
|
|
|
|
|
||
|
|
|
1 |
|
; |
|
угла поворота в единицу времени, c |
|
|
||||
felix, стр. 13
- угловым ускорением
менение угловой скорости
d d 2 , т.е. величиной, характеризующей из- dt dt2
по величине в единицу времени, c 2 .
Угловую скорость и угловое ускорение удобно представлять в виде скользя-
щих векторов и лежащих вдоль оси вращения.
Вектор направлен в ту сторону, откуда видно вращение тела (по ), про-
исходящее против хода часовой стрелки.
Направление вектора определяется аналогично.
Если вектора и сонаправлены, то вращение ускоренное.
Если вектора и противоположно направлены, то вращение замедленное.
Определение линейных скорости и ускорения точки M вращающегося тела
Т.к. s R , |
то |
ds |
|
d R |
|
d |
R R , |
|
|
|
|||||
|
|
dt |
|
dt |
|
dt |
|
где R – расстояние от рассматриваемой точки вращающегося тела до оси вращения.
Скорость любой точки вращающегося тела равняется произведению угловой скорости тела на расстояние от этой точки до оси вращения, т.е. R .
a |
d |
|
d R |
|
d |
R R . |
|
|
|
||||
|
dt |
|
dt |
|
dt |
|
|
|
|
||||
felix, стр. 14
Касательное ускорение равняется произведению углового ускорения тела на расстояние от рассматриваемой точки вращающегося тела до оси вращения.
a |
2 |
|
R 2 |
|
2 R . |
||
n |
|
|
R |
|
|
Нормальное ускорение равняется произведению квадрата угловой скорости тела на расстояние от рассматриваемой точки вращающегося тела до оси вращения.
Тогда полное ускорение соответственно определиться:
a 
 a2 an2
a2 an2 
 R 2 2 R 2 R
R 2 2 R 2 R 
 2 4 .
2 4 .
3 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТЕЛА
Плоскопараллельное движение (плоское) – движение, при котором все точ-
ки тела движутся в плоскостях параллельных некоторой неподвижной плоскости.
Поэтому, движение тела можно описать движением плоской фигуры, полу-
чающейся в сечении этого тела одной из параллельных плоскостей.
В свою очередь, движение фигуры в своей плоскости можно описать движе-
нием произвольного отрезка AB , принадлежащего этой фигуре.
В общем случае, плоское движение можно представить как совокупность по-
ступательного движения вместе с некоторым полюсом, и вращательного – пово-
рот тела вокруг этого полюса.
xA f1 t |
|
yA f2 t – |
уравнения плоского движе- |
|
ния твердого тела |
f3 t |
|
При этом поступательная часть движения зависит от выбора полюса, а
вращательная, т.е. угол поворота (по ве-
личине и направлению), – не зависит
( 1 2 ).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
felix, стр. 15 |
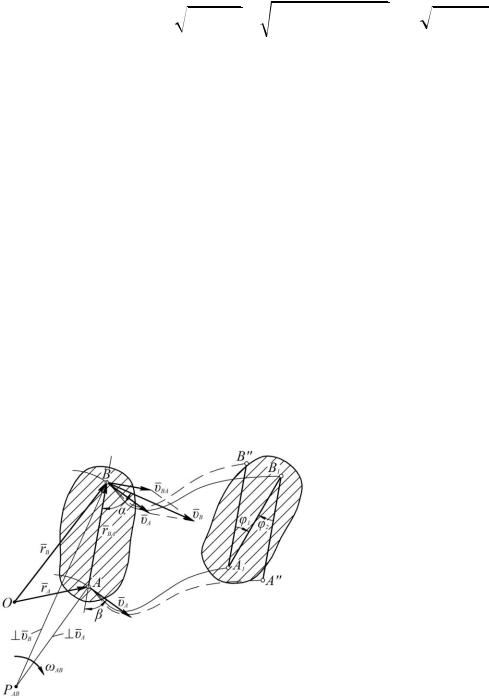
Допустим тело переместилось из положения AB в A1B1 . |
||||||||||||||||||||||||
Если за полюс взять точку |
A , то положение произвольной точки B опреде- |
|||||||||||||||||||||||
лится равенством: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
rB rA rBA . |
|
|
|
|
|
|
|
|
|
|||||
[Определим вектор скорости точки B , как производную от радиус-вектора rB |
||||||||||||||||||||||||
по времени:] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
drB |
|
drA |
|
drBA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||
|
|
|
|
B |
|
A |
|
BA |
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
dt |
|
dt |
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Вектор скорости некоторой точки B плоской фигуры равен геометрической |
||||||||||||||||||||||||
сумме скорости полюса (точки A ) и скорости этой точки (точки B ) в ее вращении |
||||||||||||||||||||||||
вместе с плоской фигурой вокруг полюса. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
BA – вектор относительной (вращательной) скорости точки B вокруг полюса A . |
||||||||||||||||||||||
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
BA |
всегда перпендикулярен AB и направлен в сторону уг- |
|||||||||||||||||||
Вектор скорости |
||||||||||||||||||||||||
|
|
BA определяется: |
|
|||||||||||||||||||||
ловой скорости AB . По величине вектор |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
BA AB lAB , |
|
|
|
|
|
|
|
|
|
|
|
||||
где lAB – длина отрезка AB , м.
Зачастую удобно пользоваться следующей теоремой:
При плоском движении проекции абсолютных скоростей двух точек пло-
ской фигуры на линию, проходящую через эти точки, алгебраически равны:
A cos B cos .
Влюбой момент движения плоской фигуры, в ее плоскости существует точка абсолютная скорость которой, в данный момент времени, равна нулю. Эта точка называется мгновенным центром скоростей (МЦС).
Для определения положения МЦС необходимо восстановить перпендикуля-
ры к векторам абсолютных скоростей точек плоской фигуры, проведенных из этих точек. На пересечении этих линий будет находиться МЦС (точка PAB ), т.е.
точка относительно которой, в данный момент времени, тело совершает мгновен-
ный поворот. Мгновенная угловая скорость тела определится: AB |
|
A |
|
B |
. |
|
APAB |
BPAB |
|||||
|
|
|
|
felix, стр. 16
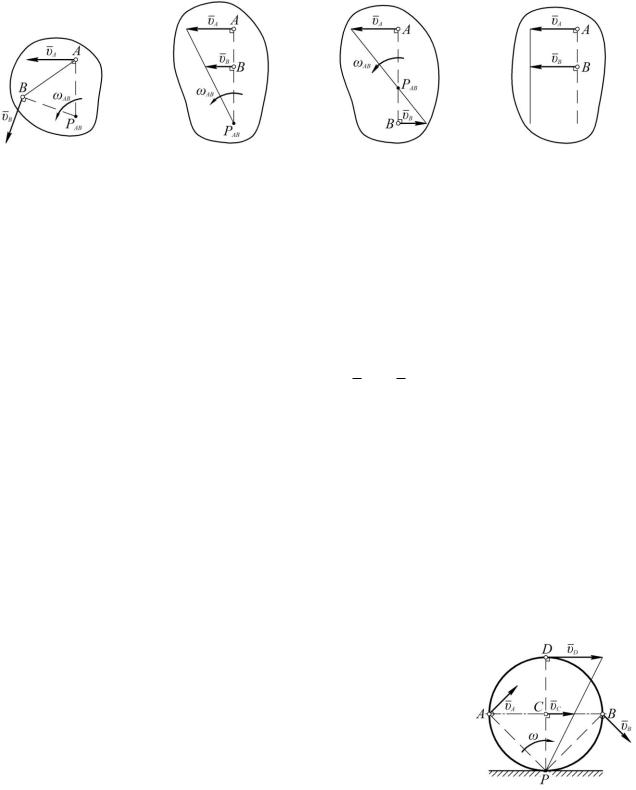
3.1 Различные случаи определения положения МЦС
Случай 1 |
Случай 2 |
Случай 3 |
Случай 4 |
[Случай 1. Восстанавливаем перпендикуляры из этих точек |
A и B к векто- |
||
рам скоростей этих точек, на пересечении которых находиться МЦС (точка PAB ).]
Случаи 2 и 3. Если вектора скоростей точек A и B параллельны между со-
бой, то для определения МЦС должны быть известны их модули.
[Проводим линию через точки A и B , перпендикулярную векторам скоро-
стей и линию соединяющую концы векторов A и B – на их пересечении будет находиться МЦС (точка PAB ).]
Случай 4. Если вектора скоростей точек A и B плоской фигуры равны по модулю и параллельны между собой, то МЦС находится в бесконечности ( APAB ; BPAB ), а мгновенная угловая скорость:
|
|
|
A |
|
B |
A B 0 . |
|
AB |
|
|
|||||
|
|
APAB |
|
BPAB |
|
|
|
|
|
|
|
||||
Тело совершает мгновенное поступательное движение.
Случай 5. Если тело катится без скольжения по некоторой неподвижной плоскости, то МЦС (точка P ) будет нахо-
диться в точке соприкасания с этой неподвижной плоско-
стью. Угловая скорость тела определится соответственно:
|
A |
|
B |
|
C |
|
D |
. |
|
|
|
|
|
|
|||||
|
AP |
|
BP |
|
CP |
|
DP |
Случай 5 |
|

felix, стр. 17
4 СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Сложным называется движение, при котором точка (тело) одновременно участвует в двух или более движениях.
[Например, перемещение человека в вагоне движущегося поезда.]
Например, перемещение человека по палубе плывущего парохода.
Движение рассматриваемой точки (тела) относительно подвижной системы отсчета называется относительным. Характеризуется траекторией относитель-
ного движения, относительной скоростью r , относительным ускорением ar .
Движение подвижной системы отсчета и неизменно связанной с ней точкой
(тела) относительно неподвижной системы отсчета называется переносным. Ха-
рактеризуется траекторией переносного движения, переносной скоростью e , пе-
реносным ускорением ae .
Движение рассматриваемой точки (те-
ла) относительно неподвижной системы от-
счета называется абсолютным. Характери-
зуется траекторией абсолютного движения,
абсолютной скоростью a , абсолютным ус-
корением aa .
Абсолютное движение складывается
из относительного и переносного:
ra rr re ,
а абсолютная скорость при сложном движении точки определяется как векторная сумма скоростей переносного и относительного движений:
a r e .
Абсолютное ускорение точки, в общем случае, определяется по теореме Ко-
риолиса:
aa ar ae aк ,
felix, стр. 18
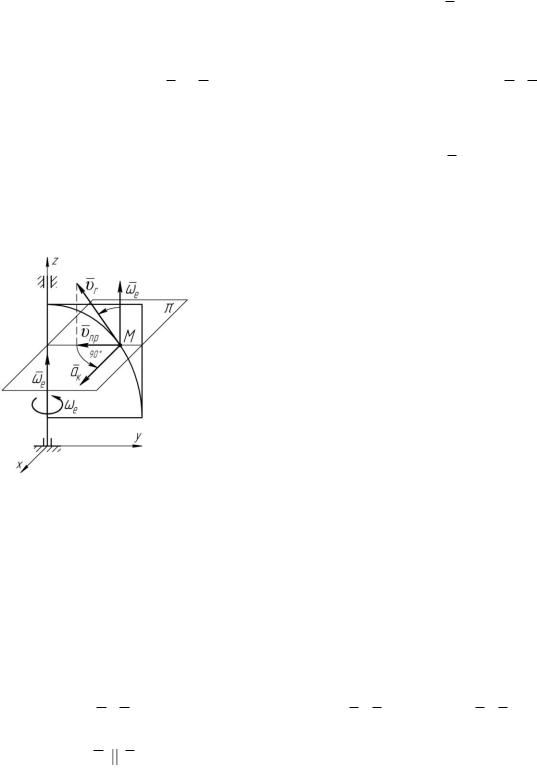
где aк – кориолисово (поворотное) ускорение, которое стремится изменить на-
правление вектора относительной скорости r в направлении перенос-
ной угловой скорости e .
aк 2 |
e r или по модулю |
aк 2 e r sin |
e , r . |
Чтобы найти направление вектора Кориолисова ускорения необходимо мыс-
ленно перенести вектор переносной угловой скорости e в рассматриваемую точ-
ку, а затем следовать одному из правил.
|
|
|
|
|
Правило векторной алгебры |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор aк перпендикулярен векторам |
e |
и r , и |
|||||||||
направлен в ту сторону, откуда виден кратчайший пере- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
ход от |
e к r против хода часовой стрелки. |
|
|
|
|||||||||
|
|
|
|
|
|
Правило Жуковского |
|
|
|
||||
|
|
|
|
|
спроеци- |
||||||||
|
|
Нужно вектор относительной скорости r |
|||||||||||
ровать в плоскость перпендикулярную оси переносного вращения z |
и повер- |
||||||||||||
|
|
пр в сторону переносного вращения (по e ) |
на 90 . |
||||||||||
нуть полученную проекцию |
|||||||||||||
Кориолисово ускорение равно нулю если:
1)e 0 , т.е. переносное движение поступательно;
2)r 0 , т.е. относительная скорость в данный момент времени равна нулю;
3)sin e , r 0 , т.е. в случае, когда e , r 0 или e , r 180 , иначе, ко-
гда вектор r e .