

ОПРЕДЛЕНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК РАВНОПЕРЕМЕННОГО ДВИЖЕНИЯ
Цель работы: 1) измерить основные кинематические характеристики равнопеременного поступательного и вращатель-ного движений; 2) познакомиться с методами обработки прямых и косвенных измерений.
Оборудование: измерительная установка; масштабная линейка;
штангенциркуль; секундомер.
Краткая теория.
I. Описание установки. В лабораториях механики используются измерительные установки, принципиальные схемы которых можно разделить на два типа1: 1) тело одновременно участвует в двух движениях – в поступательном центра масс и во вращательном отно-сительно свободной оси ОО1 (рис.1); 2) одно тело участвует во враща-тельном движении относительно неподвижной оси АА1, а второе2, свя-занное нитью с первым, участвует в поступательном движении (рис. 2).
1
– нерастяжимая невесомая нить. 2
– свободная ось 3
– маховик. 4
– маховик или крестовина (тело1) 5
– шкив или не-подвижный блок. 6
– тело, участву-ющее в поступа-тельном
движе-нии (тело 2) .




 А1
А1


 1 4
1 4

 5
5







 НО1ω
НО1ω



 3
β
3
β![]()





 2
АН
2
АН







 ω
1
a
6
ω
1
a
6
β
v
v a
![]()
О
Рис. 1 Рис.2
II. Кинематические характеристики равнопеременного движения.
Ориентации векторов основных кинематических характеристик указа-ны на рисунках 1, 2 и 3. Для нахождения модулей указанных векторов поднимем тело, участвующее в поступательном движении на высоту H. Для этого необходимо нить намотать на свободную ось (рис.1) или на шкив (рис.2). Предоставив систему самой себе, измерим время t, за которое центр масс (рис.1) или тело 2 (рис.2) пройдет расстояние H.
1)
Из формулы H=at2/2
найдем ускорение поступательного
движения центра масс (тела 2):
![]() (1)
(1)
2) Максимальная скорость центра масс (тела 2) в нижней точки траектории движения равна:
![]() (2)
(2)
3) Модуль максимальной линейной скорости Vτ точек свободной оси (шкива или блока) совпадает со скоростью V центра масс (тела 2). Из связи линейной и угловой скоростей Vτ=ωR находим максимальную угловую скорость маховика (блока или крестовины):
![]() ,
(3)
,
(3)
где R – радиус оси (шкива или блока).





 4)
Из связи тангенциального и углового
4)
Из связи тангенциального и углового
Vτ aτ an ускоренийaτ=βR, определим угловое
 a0ускорение
маховика (блока или кресто-
a0ускорение
маховика (блока или кресто-
вины):
![]() (4)
(4)
Рис.3 5) Модуль максимального нормального
ускорения an(рис.3) точек свободной оси (шкива или блока) найдем из формулы
![]() (5)
(5)
6) Из рисунка 3 следует, что модуль максимального полного ускорения а0 точек свободной оси (шкива или блока) можно определить по теореме Пифагора:
![]() .
(6)
.
(6)
- 4 -
Выполнение работы.
1. Измерения.
1. Включить в сеть измерительную установку.
2. Наматывая нить на свободную ось или шкив, поднять тело, участвующее в поступательном движении, на максимальную высоту.
3. Нажатием кнопки “СБРОС” обнулить показания электронного секундомера.
4. Освободить тело нажатием кнопки “ПУСК” и измерить время прохождения телом высоты h.
5. Пункты 2-4 повторить 5 – 7 раз. Данные эксперимента занести в таблицу 1, находящуюся в приложении 1 (стр.7).
6. Измерить радиус свободной оси (шкива или блока) и высоту, пройденную телом. Измеренные величины принять за средние значения.
2. Обработка прямых измерений.
1. Из приложения 4 (стр. 9) записать приборные погрешности линейки ΔНпр, штангенциркуля ΔRпр и секундомера Δtпр.
2. Выполнить статобработку прямых измерений времени и заполнить таблицу 1 (стр.7, приложение1).
3. Результаты прямых измерений представить в виде:
t = <t> ± Δt; H = <H> ± ΔH; R = <R> ± ΔR.
За доверительные интервалы ΔH и ΔR принять приборные погрешности.
4. Вычислить относительные погрешности:
εt=Δt/ <t>; εH= ΔH/ <H>; εR= ΔR/ <R>.
5. Результаты обработки прямых измерений занести в сводную таблицу 2. Таблица 2
|
|
h(м) |
R(м) |
t(с) |
|
Среднее значение |
|
|
|
|
Отн. погрешность |
|
|
|
|
Довер. интервал |
|
|
|
- 5 -
Обработка косвенных измерений.
1. Для всех кинематических характеристик, рассмотренных в краткой теории, вычислить их средние значения, относительные погрешности и доверительные интервалы. Последовательность обработки косвенных измерений ускорения поступательного движения тела приведена в приложении 2 (стр.8). Обработка косвенных измерений остальных кинематических характеристик проводится аналогично.
2. Результаты обработки косвенных измерений занести в табл. 3.
Таблица 3.
|
|
а (м/с2) |
v (м/с) |
β (ε)(рад/с) |
ω (рад/с) |
an (м/с2) |
ao (м/с2) |
|
Среднее значение |
|
|
|
|
|
|
|
Относ. погрешность |
|
|
|
|
|
|
|
Доверит. интервал |
|
|
|
|
|
|
3. Построить графики зависимостей:
a = a (t): v = v (t); β = β (t); ω = ω (t); an = an (t); ao =ao (t).
4. По проделанной работе сделать вывод.
Задание к контрольной неделе.
1. Выучить физический смысл всех кинематических характерис-
тик и уметь определять направления их векторов.
2. Оформить протокол лабораторной работы.
3. Выполнить индивидуальное задание из приложения 5.
Номер задания устанавливает преподаватель.
Рекомендуемая литература.
1. Савельев и.В. Курс физики. Т.1. М.: Наука. 1989. С. 21-32, 94-97.
2. Трофимова Т.И. Курс физики. М.: Высшая школа. 1997. С. 6-14.
3 .Детлаф А.А. Яворский Б.М. Курс физики. М.: Высшая школа. 2000.
С. 8-18, 47-50.
4. Ахматов А.С. Лабораторный практикум по физике. М.: Высшая школа.
1980. с.11-15.
- 6 -
Приложение 1
Статистическая обработка прямых измерений.
1. Измерения времени t, выполненные в пунктах 2-5 (стр.5), занести в колонку t таблицы 1.
2. Вычислить среднее арифметическое значение этой величины:
<t>=(t1+t2+ … +tn)/n ,
где n-число измерений.
3.Определить
абсолютные погрешности отдельных
измерений:![]()
Δ ti= | <t>-ti|
4. Возвести в квадрат абсолютные погрешности отдельных измерений: Δ t12, Δ t2 2, Δ t32 ….
5. Вычислить стандартный доверительный интервал по формуле:
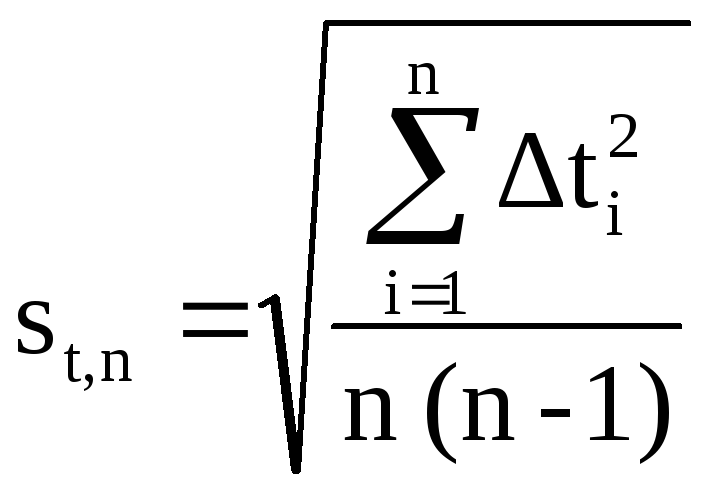 .
.
6. При заданном преподавателем значении доверительной вероятности α записать соответствующий коэффициент Стьюдента t(α,n) из таблицы в приложении 3. Найти случайную погрешность по формуле: Δ tсл= t (α,n) St,n.
7. С учетом приборной погрешности Δtпр. рассчитать величину доверительного интервала по формуле:
![]()
8.Результаты вычислений занести в таблицу отчета (табл.1).
Таблица 1
|
№ |
t |
Δt |
Δt2 |
S t,n |
t(α,n) |
Δtсл |
Δtпр |
Δt |
|
п/п |
c |
c |
с2 |
с |
– |
c |
с |
с |
|
1. 2. … 7. |
|
|
|
|
|
|
|
|
|
Ср. |
|
|
|
|
|
|
|
|
- 7 -