

Принципы классификации и типы систем распознавания
СР делятся на: -простые; -сложные.
Простые СР характеризуются единой физической природой признаков.
Например:
1)только масса - для систем распознавания жетонов, монет в автоматах таких, как междугородный телефон, турникет метро;
Ясно, что для простых систем распознавания не обязательно иметь компьютер. Достаточно их реализовать в виде механических или электромеханических устройств. Хотя компьютерные реализации в принципе не противопоказаны, если наряду с этой в системе решаются и другие более достойные задачи.
Сложные СР характеризуются физической неоднородностью признаков.
По принципу получения апостериорной информации сложные системы распознавания делятся на:
-одноуровневые;
-многоуровневые.
В одноуровневых СР информация о признаках распознаваемого объекта (апостериорная информация) формируется непосредственно на основе обработки прямых измерений.
К одноуровневым относят, например, читающие автоматические распознающие устройства, автоматы для размена монет, автоматические устройства, предназначенные для отбраковкидеталей, в качестве признаков используются некоторые линейные размеры, либо масса и т.д.
В многоуровневых СР информация о признаках формируется на основе косвенных измерений как результат функционирования вспомогательных распознающих устройств (пример: измерение дальности радиолокатором по времени задержки излученного импульса).
Многоуровневые сложные системы распознавания отличаются от одноуровневых тем, что не все признаки от разнородных физических измерителей используются непосредственно для решения задачи распознавания.
По количеству первоначальной априорной информации СР делятся на:
-системы без обучения;
-обучающиеся (ОСР) и самообучающиеся системы (ССР).
Многоуровневые сложные СР однозначно нельзя разделить на указанные классы, так как каждая из локальных СР, входящих в их состав, сама может представлять как систему без обучения, так и систему обучающуюся или самообучающуюся.
Системы без обучения.
Для построения таких систем необходимо располагать полной первоначальной априорной информацией.
Обучающиеся системы.
Для обучающихся систем мы должны иметь дело с ситуацией, когда априорной информации не хватает для описания распознаваемых классов на языке признаков. (Возможны случаи, когда информации хватает, однако делать упомянутое описание нецелесообразно или трудно).
То есть, на стадии формирования ОСР работают с "учителем", осуществляющим указание о принадлежности предъявленного для обучения объекта. И прежде, чем система будет применяться, должен пройти этап обучения.
Самообучающиеся системы.
Определен словарь признаков распознавания. Однако для организации процесса обучения задается некоторый набор правил, в соответствии с которым система сама вырабатывает классификацию.
Для ССР так же, как для ОСР существует период обучения, характерно наличие периода самообучения, когда ей предъявляются объекты обучающей последовательности. Только при этом не указывается принадлежность их к каким-либо классам.
Примером самообучающейся системы может быть система разделения на классы промышленных предприятий для сравнительного анализа эффективности их функционирования. При этом в качестве правил классификации могут быть указания либо о равенстве объемов выпускаемой продукции, либо о равенстве численности рабочих и т.п.).
В другой широко применяемой терминологии ССР - это система автоматического кластерного анализа или таксономии (taxis- порядок,nomos- закон).
По характеру информации о признаках распознавания СР подразделяются на:
-детерминированные;
-вероятностные;
-логические;
-структурные (лингвистические);
-комбинированные.
Детерминированные системы.
а)Метод решения задачи распознавания: использование геометрических мер близости;
б)Метод априорного описания классов: координаты векторов-эталонов по каждому из классов или координаты всех объектов, принадлежащих классам (наборы эталонов по каждому классу).
Вероятностные системы.
а)Метод решения задачи распознавания: вероятностный, основанный на вероятностной мере близости (средний риск);
б)Метод априорного описания классов: вероятностные зависимости между признаками и классами.
Логические системы.
а)Метод решения задачи распознавания: логический, основанный на дискретном анализе и исчислении высказываний;
б)Метод априорного описания классов: логические связи, выражаемые через систему булевых уравнений, где признаки - переменные, классы - неизвестные величины.
Структурные (лингвистические) системы.
а)Метод решения задачи распознавания: грамматический разбор предложения, описывающего объект на языке непроизводных структурных элементов с целью определения его правильности.
б)Метод априорного описания классов: подмножества предложений, описывающих объекты каждого класса.
Комбинированные системы.
а)Метод решения задачи распознавания: специальные методы вычисления оценок;
б)Метод априорного описания классов: табличный, предполагающий использование таблиц, содержащих классифицированные объекты и их признаки (детерминированные, вероятностные, логические).
Таким образом, отсюда следует, что информацией никогда пренебрегать не стоит. Поэтому при построении как ОСР, ССР и просто СР необходимо всегда использовать принцип обратной связи расширения объема информации. То есть, результаты решения задачи распознавания неизвестных объектов после апостериорного подтверждения правильности их классификации необходимо использовать для уточнения описания классов в простых СР без обучения и для дополнительного обучения в ОСР и ССР.
Также существуют экспертные системы распознавания образов, эти системы основываются на методах искусственного интеллекта.
Рассмотренные системы распознавания основываются на моделировании математико-алгоритмических функций (уравнения, системы уравнений) детерминированных или стохастических систем с точным определением области применения, значений параметров, диапазонов сигналов, интервалов времени, частотных диапазонов и т.п. Эти задачи опираются на надежные, точно научно обоснованные знания.
Экспертные системы, основываются на представлении неалгоритмического, логического, декларативного характера, нечеткого и слабо формализованного знания в виде множества фактов и правил, причинно-следственных связей.
Указанные знания при этом могут быть как заслуживающими доверия, так и сомнительными.
Экспертные системы распознавания - это специализированные автоматы обработки знаний для интерактивного и кооперативного решения проблем распознавания на естественном профессиональном языке со способностями приобретения, хранения и представления знаний в форме алгоритмических программ с одной стороны и неалгоритмических фактов и правил, с другой стороны.
Их отличительная особенность состоит в том, что их основу составляют вполне определенный алфавит классов и словарь признаков. При этом каждый класс объектов или явлений на основе априорных данных четко описывается на языке этих признаков. Кроме того, в состав математического обеспечения современных систем входят правила принятия решений, алгоритмы распознавания. Они предназначены для сопоставления апостериорной информации о каждом распознаваемом объекте, представляемой в виде совокупности конкретных значений присущих ему признаков, выявленных в результате проведения с помощью измерительных средств опытов, с априорной информацией о классах объектов. На основе этого сопоставления и принимается решение об отнесении неизвестного объекта к определенному классу, если система не отказывается от его распознавания.
В мехатронных системах и робототехнике для распознавания объектов все чаще используются системы технического зрения. Техническое зрение можно определить как процесс выделения, идентификации и преобразования информации, полученной из трехмерных изображений. Этот процесс включает 6 этапов: снятие информации; предварительная обработка информации; сегментация; описание; распознавание; интерпретация.
Снятие информации – получение визуального изображения. Предварительная обработка – понижение шума или улучшение изображения отдельных деталей. Сегментация - процесс выделения на изображении интересующих объектов. При описании определяются характерные параметры (например, форма, размеры), необходимые для выделения требуемого объекта на фоне других. Распознавание – процесс идентификации объектов. Интерпретация – выявляет принадлежность к группе распознаваемых объектов.
Различают три уровня технического зрения.
Низкий уровень – процессы, которые являются простыми с точки зрения осуществления автоматических действий, не требующих наличия искусственного интеллекта (снятие и предварительная обработка информации).
Средний – процессы выделения, идентификации и разметки элементов изображения, полученных на нижнем уровне (сегментация, описание и распознавание объектов). Под высоким уровнем понимаются процессы, относящиеся к искусственному интеллекту. Системы высокого уровня обладают следующими признаками:
- возможностью выделения существенной информации из множества независимых признаков;
- способностью к обучению на примерах и обобщению этих знаний с целью их применения в новых ситуациях;
- возможностью восстановления событий по неполной информации;
- способностью определять цели и формулировать планы для достижения этих целей.
Системы технического зрения высокого уровня решают, как правило, все задачи систем низкого и среднего уровня. Характеристики таких систем далеки от возможностей человеческого зрения.
Сегментация – процесс подразделения сцены на составляющие части или объекты. Алгоритмы сегментации, как правило, основываются на двух фундаментальных принципах: разрывности и подобия. В первом случае подход основывается на определении контуров, во втором – на определении порогового уровня и расширении области.
При определении контуров могут использоваться различные методы: локальный анализ – анализ характеристик пикселов в небольшой окрестности (3х3 или 5х5) каждой точки образа, который уже подвергался процедуре обнаружения контура. Подобные точки соединяются между собой. Основным критерием является показатель освещенности. Кроме того используются другие методы: преобразования Хоуга с выявлением собираемости элементов, глобальный анализ с помощью методов теории графов, методы расширения области за счет объединения пикселов и другие.
Описание – выделение свойств (деталей) объекта с целью распознавания. В идеале дескрипторы не должны зависеть от размеров, расположения и ориентации объекта, но должны содержать достаточное количество информации для надежной идентификации объекта. В качестве дескрипторов границ применяют цепные коды. Цепные коды применяются для представления границы в виде последовательности отрезков прямых линий определенной длины и направления. В основном применяется 4-х или 8 связные дескрипторы, прямоугольная решетка.

Длина каждого отрезка определяется разрешением решетки, а направление задается выбранным кодом. Для отражения цепного кода сначала выбирается решетка. Тогда, если площадь ячейки, расположенной внутри границы, больше определенного числа (обычно 50%), ей присваивается значение 1, ели меньше – 0. Цепной код данной границы зависит от начальной точки. Метод точек эффективен только в тех случаях, когда сами границы инвариантны к повороту и изменению масштаба.
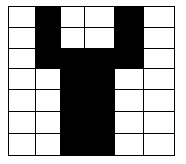

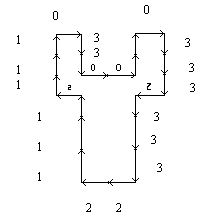
Код из левого верхнего угла: 03300110333233322….
Существуют также другие методы (аппроксимация многоугольниками, математические методы, использующие преобразования Фурье и др.).
В системах технического зрения также применяют дескрипторные области. Например, площадь области определяется как число пикселов, содержащихся в пределах ее границ. Большие и малые оси области полезны для определения ориентации объекта. Особые проблемы представляет описание объектов и создание текстурных дескрипторов.
Распознаванием называется процесс разметки, т.е. алгоритмы распознавания идентифицируют каждый объект сцены и присваивают ему метки (болт, гайка и т.п.).
Существуют две категории методов распознавания: теоретические и структурные. Теоретические основываются на количественном описании, в основе структурных методов лежит декомпозиция объекта на простейшие элементы. Зная длины и направления простейших элементов, а также порядок их расположения, можно описать структуру объекта. Для распознавания используют также синтаксические методы.
Особенности зрительного восприятия мехатронных и робототехнических систем:
- необходимость построения комплексного описания среды на основе учета значительной априорной информации (модель проблемной среды) в отличие от фиксированных признаков или измерения отдельных параметров;
- необходимость анализа трехмерных сцен не только в плане анализа трехмерных объектов по их плоским проекциям, но и в плане определения объемных пространственных отношений;
- необходимость анализа изображений, включающих одновременно несколько произвольно расположенных объектов в отличие от традиционной задачи, когда для распознавания предъявляется один объект;
- необходимость анализировать реальную динамическую среду, а не статическое изображение;
- отсутствие постоянной фиксированной задачи и необходимость оперативно решать возникающие по ходу дела задачи;
- необходимость организации системного процесса взаимодействия в реальном времени нескольких подсистем мехатронной или робототехнической системы (глаз-мозг), (глаз-мозг-исполнительные механизмы).