

192EMBEDDED CONTROLLER
Hardware Design
in Figure 9-9. This is typical of a microcomputer bus with shared interrupt request signals on the bus, and for devices that are capable of generating multiple interrupts simultaneously. This is often implemented by connecting
multiple open-drain or open-collector,
IRQ1
active low requests to the interrupt request 
 IRQ to CPU line with a pull-up resistor. This allows
IRQ to CPU line with a pull-up resistor. This allows
multiple devices to use the same /IRQ line.
An edge triggered system would sense only one edge, and thus it may miss IRQ2 whereas a level sensitive system will respond to both. An example of this condition in the 8051 CPU is the serial I/O port interrupt. The “receive buffer full” and the “transmit buffer empty” signals are combined as shown above to a common level-sensitive internal interrupt request. If the receive buffer happened to be filled and the transmit buffer emptied at the same time, there would only be one edge, due to the overlapping requests. Thus, a level sensitive input is required to guarantee that both interrupt will be serviced.
Vectored Interrupts
In a vectored interrupt system, the interrupt request is accompanied by an identifier, referred to as a vector or interrupt vector number that defines the source of the interrupt. The vector is a pointer that is used as an index into a table known as the interrupt vector table. This table contains the addresses of the ISRs that are to be executed when the corresponding interrupts are processed. The 8051 CPU architecture does have separate interrupt vectors for different interrupts, but it does not have an interrupt vector table. Instead, each interrupt is assigned a separate absolute memory address that will generally contain a jump to the actual ISR to be executed.
In other processors with interrupt vector tables, when a vectored interrupt is processed, the CPU goes through the following sequence of events to begin execution of the ISR:
1.After acknowledging the interrupt, the CPU receives the vector number.
2.The CPU converts the vector into a memory address in the vector table.
3.The ISR address is fetched from the vector table and placed in the program counter.
193CHAPTER NINE
Other Interfaces and Bus Cycles
For example, when an external event occurs, the interrupting device activates the IRQ input to the interrupt controller that then requests an interrupt cycle from the CPU. When the CPU acknowledges the interrupt, the interrupt con troller passes the vector number to the CPU. The CPU converts the vector number to a memory address. This address points to the place in memory, which in turn contains the address of ISR.
Non-Vectored Interrupts
For systems with non-vectored interrupts, there is only one interrupt service routine entry point, and the ISR code must determine what caused the inter rupt if there are multiple interrupt sources in the system. When an interrupt occurs a call to a fixed location is executed, and that begins execution of the ISR. It is possible to have multiple interrupts pointing to the same ISR. The first act of such an ISR is to determine which interrupt occurred and branch to the appropriate handler. Serial I/O ports frequently have one vector for transmit and receive interrupts.
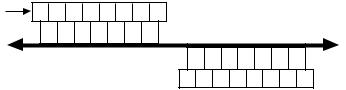
A typical microcontroller serial I/O port consists of a serial-in/parallel-out shift register for receiving serial input data, and a parallel-in/serial-out shift register for transmitting serial data, as shown in figure 9-10.
Serial to Parallel
Shift Register
Serial |
|
Data In |
CPU Data Bus |
|
Figure 9-10: Serial to parallel conversion interface.
 Serial
Serial
Parallel to Serial Data Out Shift Register
When the last bit of serial data shifts into the receive register, the receive interrupt bit is set (the RI SFR bit in the 8051) to indicate that the receiver buffer is full and ready to be read by the CPU. Likewise, the transmit interrupt bit is set (the TI SFR bit in the 8051) to when transmit buffer is empty and ready to accept more data from the CPU.

194EMBEDDED CONTROLLER
Hardware Design
When multiple simultaneous interrupts occur, the processor must have some way of choosing which interrupt should be processed first. There are two common techniques for resolving the priority of simultaneous interrupts: serial and parallel.
Serial Interrupt Prioritization
When an interrupt occurs, the interrupting device lowers IEO and waits until IEI is high. Each device below it in line lowers its IEO. The device then per forms an interrupt cycle. When the ISR is complete an end of interrupt occurs, the interrupting device raises its IEO line, which propagates down the line. This is usually referred to as a daisy chain interrupt priority system. At any given time, the highest priority device in the chain will be serviced first. Figure 9-11 illustrates this process.
Logic
One
Highest |
|
|
|
|
|
|
|
|
|
Lowest |
|
|||
IEI IEO |
|
IEI IEO |
|
IEI IEO |
|
IEI IEO |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IEI = Interrupt Enable Input
IEO = Interrupt Enable Output
Figure 9-11: Serial “daisy chain” interrupt prioritization.
Parallel Interrupt Prioritization
A parallel priority encoder can also be used to prioritize multiple simulta neous interrupt requests. The priority encoder encodes the highest priority active input as a binary value, and that value is used as part of the interrupt vector number. The interrupts could be prioritized using an encoder that is equivalent to a 74x148 style 8:3 line priority encoder.
In most machines, the CPU checks for interrupt requests just after execution of each instruction. When an interrupt is enabled and occurs, the CPU will:
1.Save the PC (program counter) on the stack.
2.Acknowledge the interrupt request and get the vector from interrupt source.
195CHAPTER NINE
Other Interfaces and Bus Cycles
3.Use the vector as an address or as a pointer into the interrupt vector table to fetch the address of the ISR from the vector table.
4.Load the address of ISR into the program counter.
5.CPU executes the ISR until return from interrupt execution at end of ISR.
6.Pop address off stack into program counter.
7.Continue execution where interrupt occurred.
The purpose of the interrupt processing sequence is to allow the processor to temporarily stop an executing program when an external event occurs, call the appropriate interrupt service routine to process the event, and then return to the interrupted program where it left off.
Interrupts provide a very efficient means for the processing of events that occur at unpredictable times with a minimum of delay. This is particularly important when there are a number of things that the processor must handle concurrently. Whole operating systems, usually referred to as real-time operating systems (RTOS), are designed to allow an application programmer to design multiple programs that can run concurrently on a single CPU almost as if they were running on separate processors.