

спутниковая система
.pdfГеодезическая опорная (реперная) сеть
RS1 |
RS3 |
RS5 |
RS7 |
RS9 |
|
|
|
||
|
|
|
|
Полоса отвода ж/д
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50-70км |
|
RS2 |
RS4 |
RS6 |
RS10 |
RS - референцные станции |
RS8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.
Апробация использования референцных стананцийций ДГНССДГНСС |
||
|
анций ДГНСС |
|
в пилотном проекте Москва-Клин |
||
|
нн |
|
Дмитров |
Точности |
|
|
определения |
|
|
местоположения, |
|
|
экспериментально |
|
Подсолнечная |
полученные |
|
в результате |
||
|
||
|
пилотного проекта: |
|
|
для стационарных |
|
|
объектов ±2 см в |
|
|
режиме реального |
|
|
времени; |
|
|
на пунктах |
|
|
реперной сети |
|
|
±5-6 мм в режиме |
|
|
постобработки; |
|
|
на подвижных |
|
|
объектах ±5 см |
|
|
на скоростях |
|
|
до 140 км/час. |
|
“ Современные проблемы ДЗЗ из космоса”, |
||
Москва, ИКИ РАН, 11 ноября 2008 г. |
|
|
Применение высокоточных ДГНСС в задачахзадачахзадачах инженерно-геодезического обеспечения путевыхтевыхтевых работработработ
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.
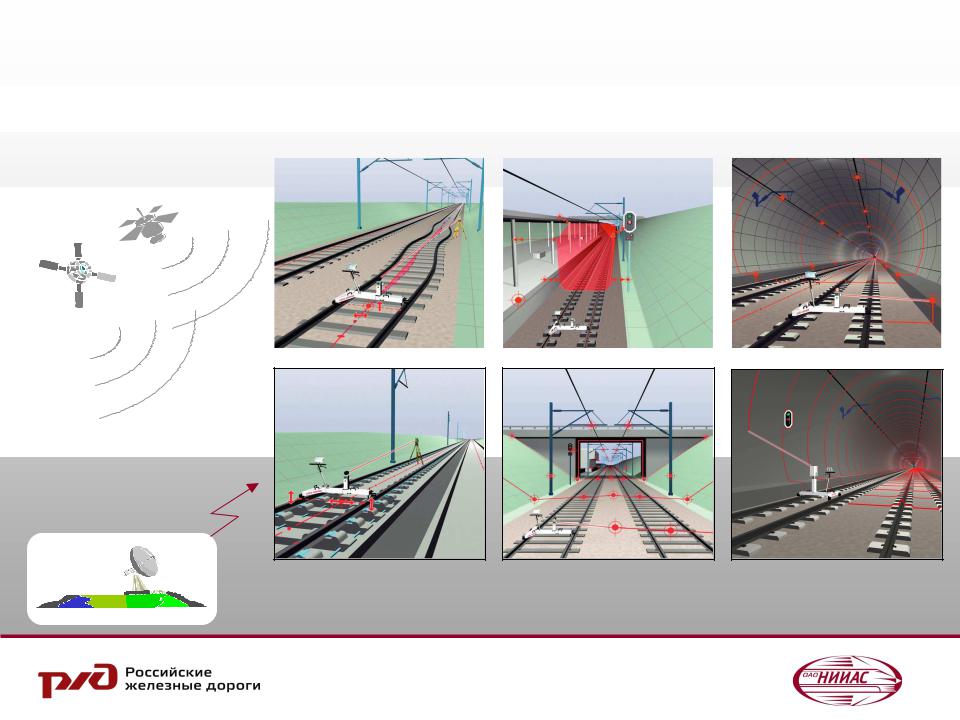
Измерение геометрии пути и параметров инфраструктурыаструктурыаструктуры путем комплексирования спутниковых и наземныххх измеренийизмеренийизмерений
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ГНСС |
Геометрия пути |
Инфраструктура |
|
Тоннели |
||
(ГЛОНАСС, GPS, |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GALILEO) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
наземные
референцные
станции
Измерения в абсолютных или линейных координатах и относительно дороги
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.

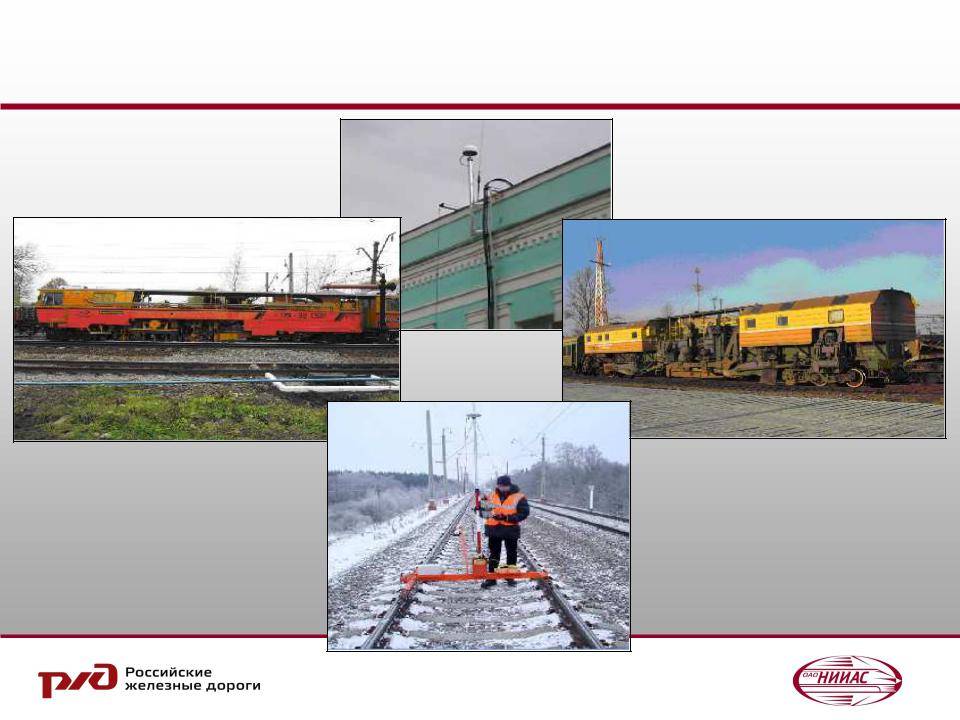
Скоростная путеобследовательская станция ЦНИИИИ---444МДМДМД
ЦНИИ-4МД (Россия) оснащён бесплатформен- ной лазерной навигационной гиросистемой, позволяет выявлять недопустимые отклонения геометрических параметров пути при скоростях движения до 160 км/час.
Точность позиционирования: ±3-5 см в режиме реального времени,
±3-5 мм в режиме постобработки.
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.

Современные путеизмерительные тележки
путеизмерительная тележка АПК « Профиль»
путеизмерительная тележка МИИТ
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.

Управление маневровыми локомотивами на станциистанции |
||||||
|
|
|
|
|
|
станции |
с использованием спутниковой навигации и цифровогоого радиоканаларадиоканала |
||||||
|
|
|
|
|
|
ого радиоканала |
Цифровая модель |
|
|
|
|
Спутниковая навигационная |
|
путевого развития |
|
|
|
|
группировка (ГЛОНАСС, GPS) |
|
(ЦМПР)для средств |
|
|
|
|
|
|
спутниковой |
|
|
|
|
|
Приёмник |
навигации (ССН): |
|
навигационные данные (НД) |
|
|
||
|
|
|
радионавигационных |
|||
координаты точек |
|
|
|
|
|
Сигналов (ПРНС) |
путевого развития – |
|
|
|
|
|
|
стрелок, предельных |
|
|
|
|
|
|
столбиков, стыков, |
|
|
Базовая |
|
Блок индикации |
|
замедлителей |
|
|
станция |
|
локомотива |
|
|
|
|
|
|
||
ПРНС |
ПРНС |
|
|
|
|
|
|
|
|
|
|
||
базовая |
|
|
160 |
МГц |
|
|
станция |
|
|
|
|
||
160 |
МГц |
|
|
|
|
|
|
|
|
|
|
||
|
|
Информационные системы |
|
|
Базовая |
|
|
|
верхнего уровня |
|
|
|
|
|
|
|
АРМы ДСП |
станция |
|
|
|
|
|
|
|
||
|
|
Управляющий |
|
|
|
|
|
|
вычислительный комплекс |
|
позиционирование локомотива с |
|
|
|
|
|
|
|||
|
|
|
|
привязкой к ЦМПР и ЭЦ в |
|
|
|
|
|
|
местной системе координат в |
|
|
Цифровой |
|
Контроллер сбора данных |
|
дифференциальном режиме; |
|
|
|
|
|
вычисление допустимого |
|
||
радиоканал (ЦРК) |
|
|
|
|||
|
|
|
расстояния для движения |
|
||
передачи данных |
|
|
|
|
||
|
Устройства ЭЦ станции |
|
локомотива; |
|
АРМ дежурного |
|
пост-борт |
|
|
расчёт тормозной кривой |
по парку (ДСП) |
||
160 МГц |
|
|
|
локомотива. |
|
|
|
|
|
|
|
|
|
|
|
“ Современные проблемы ДЗЗ из космоса”, |
||||
|
|
Москва, ИКИ РАН, 11 ноября 2008 г. |
|
|||

Cоздание цифровой карт. основы для внедрениянедрениянедрения спутниковых технологий на подвижных объектахобъектахобъектах
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.
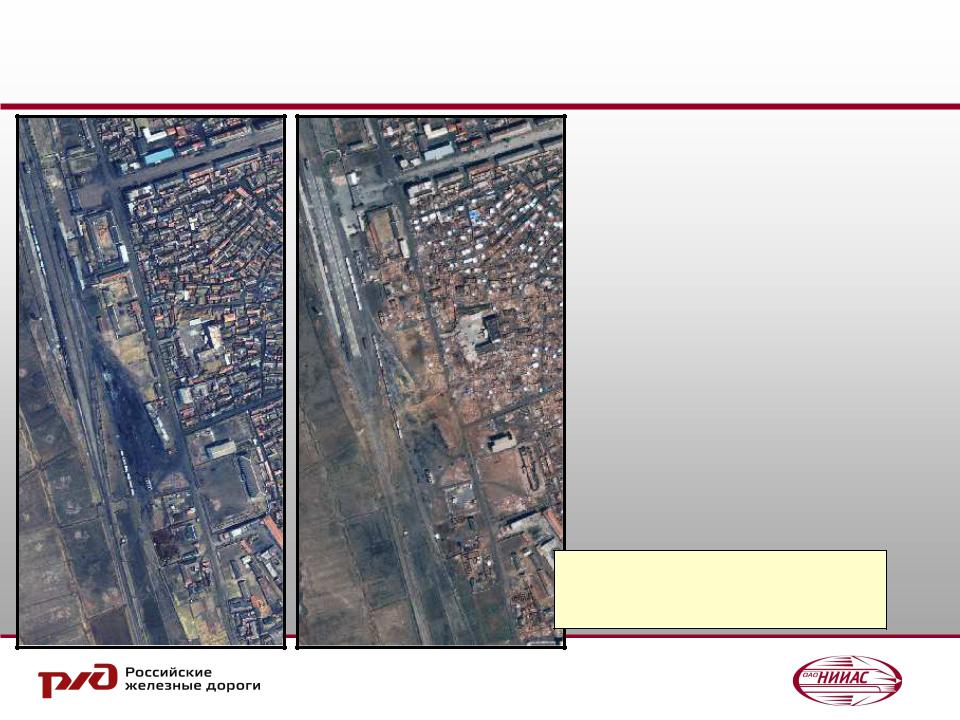
Спутниковый мониторинг для железнодорожного транспортатата
До взрыва
Quick-Bird, 0,6 м
После взрыва
Quick-Bird, 0,6 м
Преимуществаства данныхданных ДЗЗДЗЗ::
Объективность данных
Оперативность съемки
Метричность измерений
Наглядность представления
Обзорность съемки
Информативность (наличие спектральных каналов)
Высокая детальность
Относительно низкая цена
Цифровое представление
Возможность непосредственной интеграции с ГИС
Наблюдение последствий взрыва на железнодорожной станции в Корее оптической системой ДЗЗ
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.
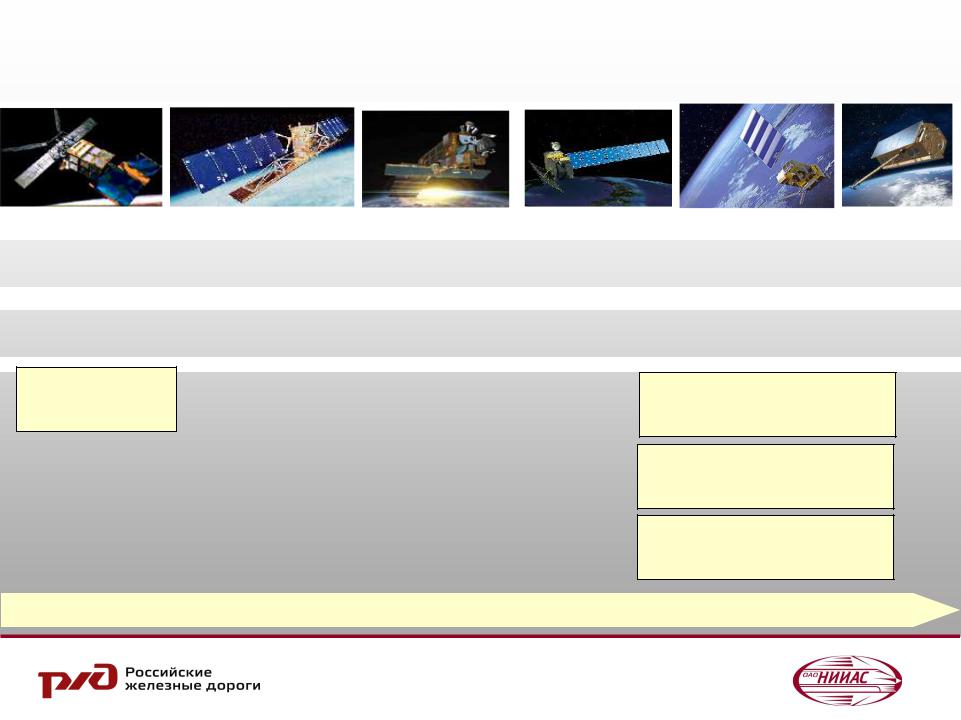
Прогресс космических радиолокационных систем ДЗЗЗЗ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ERS-2 |
|
ENVISAT |
|
|
|
|
|
|
Начато развертывание |
|||
|
C, 30м, VV |
|
С, 30-150м, HH,VV,HV,VH |
многоспутниковых РЛ систем |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ALOS |
|
|
Накоплены архивы РЛ снимков |
|
|
|||
|
и опыт их обработки и применения |
L, 7-100м, HH,VV,HV,VH |
|
|||
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RADARSAT-1
C, 8-100м, HH
Пространственное разрешение снимков сравнялось с оптическими системами ДЗЗ
Современные РЛ системы имеют возможность выбора режимов съемки (поляризации, разрешения)
1995 |
… |
2002 |
… |
2006 |
RADARSAT-2
C, 3-100м, HH,VV,HV,VH
COSMO-SkyMed . . .
X, 1-100м, HH,VV,HV,VH
TerraSAR-X
X, 1-16м, HH,VV,HV,VH
. . .
2007
“ Современные проблемы ДЗЗ из космоса”, Москва, ИКИ РАН, 11 ноября 2008 г.