

umm_5902
.pdf4.2. Исследование электромеханической системы в статическом режиме:
–снятие скоростной и механической характеристик двигателя:
–вращая регулировочную рукоятку на блоке 206.1, разогнать двигатель Д до скорости 1000–1500 об/мин;
–вращая регулировочную рукоятку на блоке 318.2 и меняя тем самым момент нагрузки на валу двигателя Д, изменять скорость его вращения;
–значения угловой скорости n, а также соответствующие им значе-
ния напряжения на якоре Uя и тока якоря Iя, снимаемые с соответствующих измерительных приборов, занести в табл. 1.1.
–по завершении эксперимента все рукоятки вернуть в исходные положения;
–выключить выключатели «СЕТЬ» всех блоков и отключить 3-х фазный источник питания;
–используя результаты опытов, пересчитать значения угловой скорости согласно выражению, рад/c
ω= 260πn ,
а также вращающего момента на валу двигателя по эмпирической формуле, Нм
M= 260πn(U я −65 Iя ) Iя
изанести полученные результаты в нижние две строки табл. 1.1;
Таблица 1
Uя (В)
Iя (А)
n(об/мин)
М(Нм)
ω(рад/с)
–по данным табл. 1.1 построить графики скоростной ω = f (Iя) и механической ω = f (М) характеристик двигателя.
–повторить эксперимент для двух других положений рукоятки регулировочного реостата на блоке 323.4, соответствующих различным зна-
11

чениям добавочного сопротивления в цепи якоря (например, среднее и крайнее против часовой стрелки положения).
Построить семейство скоростных и механических характеристик для различных значений сопротивления якорной цепи.
4.3. Исследование электромеханической системы в динамическом режиме
Динамический (переходный) режим обусловлен изменением скорости вращения двигателя. Настоящая работа предусматривает три варианта регулировки скорости.
4.3.1. Реостатное регулирование скорости электропривода
–установить рукоятки реостатов Rя на блоке 323.4 и Rв на блоке 308.2
вположения, соответствующие минимальным значениям сопротивления;
–включить 3-х фазный источник питания (блок 201.2);
–включить выключатели «СЕТЬ» всех используемых в эксперименте блоков;
–нажать кнопку «ВКЛ» на блоке 206.1;
–вращая регулировочную рукоятку на блоке 206.1, разогнать двигатель до угловой скорости n = 1000–1500 об/мин;
–вращая регулировочную рукоятку на блоке 318.2, установить значение тока якоря двигателя Д порядка 0,3–0,5А и поддерживать его
входе эксперимента;
–вращением рукоятки Rя (блок 323.4), изменять сопротивление якорной цепи, занося значения сопротивления и соответствующие им значения скорости в табл. 1.2.
Таблица 1.2
Rя (ом)
n (об/мин)
ω(рад/с)
–по завершении эксперимента все рукоятки вернуть в исходные положения;
–выключить выключатели «СЕТЬ» всех используемых в эксперименте блоков;
–отключить 3-х фазный источник питания;
–пересчитать значения угловой скорости с об/мин на рад/с, заполнив нижнюю строку табл. 1.2;
12

– по данным табл. 1.2 построить график зависимости ω = f (Rя) двигателя.
4.3.2 Регулирование скорости вращения двигателя изменением возбуждения:
–установить регулировочные рукоятки реостатов Rя и Rв на блоках 323.4 и 308.2 соответственно, в крайнее против часовой стрелки положение;
–включить 3-х фазный источник питания;
–включить выключатели «СЕТЬ» на каждом из блоков;
–нажать кнопку «ВКЛ» на блоке 206.1;
–вращая регулировочную рукоятку на блоке 206.1, разогнать двигатель до скорости вращения n = 1000–1500 об/мин;
–вращая регулировочную рукоятку на блоке 318.2, установить ток якоря двигателя Д порядка 0,3–0,5 А и поддерживать его в ходе эксперимента;
–меняя положение регулировочной рукоятки реостата Rв на блоке
308,2, изменять ток возбуждения двигателя Д – Iв и заносить его значения, а также соответствующие им значения скорости n вращения двигателя в табл. 1.3.
Таблица 1. 3
Iв (А)
n(об/мин)
ω(рад/с)
–по завершении эксперимента все рукоятки вернуть в исходные положения;
–нажать кнопку «ОТКЛ» на блоке 206.1;
–выключить выключатели «СЕТЬ» всех используемых в эксперименте блоков;
–отключить 3-х фазный источник питания;
–пересчитать значения скорости с об/мин на рад/с и занести результаты в нижнюю строку таблицы;
–по данным табл. 1.3 построить график зависимости ω = f (Iв) двигателя.
4.3.3 Регулирование скорости вращения двигателя изменением напряжения на якоре:
– установить регулировочные рукоятки реостатов Rя и Rв в крайние против часовой стрелки положения;
13

–включить 3-х фазный источник питания;
–включить выключатели «СЕТЬ» на всех блоках;
–вращая рукоятку на блоке 206.1, разогнать двигатель Д до скорости n = 1000–1500 об/мин;
–вращением рукоятки на блоке 318.2 установить ток якоря двигателя Д порядка 0,3–0,5 А и поддерживать его в ходе эксперимента;
–вращением рукоятки на блоке 206.1 уменьшать напряжение Uя на якоре двигателя Д;
–значения Uя и соответствующие им значения угловой скорости n, заносить в табл. 1.4.
Таблица 1.4
Uя (В)
n(об/мин)
ω(рад/с)
–по завершении эксперимента отключить установку, сняв напряжение питания с ее блоков, и все рукоятки вернуть в исходные положения;
–пересчитать значения скорости вращения с об/мин на рад/с и данные занести в нижнюю строку табл. 1.4;
–по данным табл. 1.4 построить график зависимости ω = f (Uя) двигателя.
Составить отчет о выполненной работе.
5. Требования к отчету
Отчет должен содержать:
–принципиальную электрическую схему системы с подробным ее описанием;
–описание функционирования всех узлов системы;
–порядок проведения экспериментов и все сопутствующие пояснения и расчеты;
–результаты всех экспериментов в табличной форме представле-
ния;
–полученные характеристики и графики зависимостей;
–выводы о проделанной работе;
14
Контрольные вопросы
1.Установившийся и переходный режим электромеханической системы. Как понимать статический и динамический режимы работы электропривода?
2.Механическая и электрическая части электропривода.
3.Уравнения движения электропривода.
4.Скоростная и механическая характеристики электропривода.
5.Особенности пускового и тормозного режимов работы двигателя постоянного тока с независимым возбуждением.
6.Способы торможения двигателей постоянного тока.
7.Схемы пуска при ручном режиме управления двигателем.
8.Стабилизация скорости электропривода постоянного тока.
9.Регулирование скорости шунтированием обмотки якоря.
10.Режим холостого хода и нагрузочный режим работы электрического привода.
15

Лабораторная работа 2
Электромеханическая система на асинхронном двигателе с фазным ротором
1. Цель работы
Целью работы является изучение установившегося и переходного режимов работы электропривода, выполненного на асинхронном двигателе с фазным ротором.
2. Программа работы
При выполнении работы надлежит исследовать электромеханическую систему в статическом и динамическом режимах.
В статическом режиме работы предусматривается снятие семейства механических характеристик электропривода для различных значений сопротивления цепи ротора.
Динамический режим работы включает в себя реостатное регулирование скорости вращения привода путем изменения сопротивления цепи ротора.
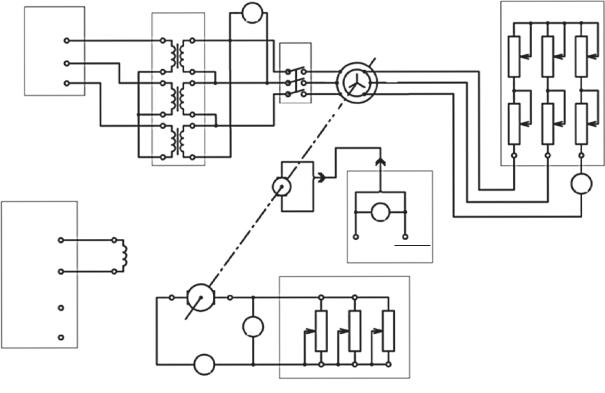
3. Описание электрической схемы исследуемой системы
Электрическая принципиальная схема исследуемой электромеханической системы приведена на рис. 2.
Фазы роторной обмотки трехфазного асинхронного двигателя АД через гнезда F 1-F 2-F 3 присоединены к регулировочному реостату, установленному на блоке 307.
Статорная обмотка двигателя АД через выключатель (блок 301.1) и блок однофазных трансформаторов 347.3, соединенных в трехфазную группу по схеме «звезда/треугольник», подключена к выходу трехфазного источника напряжения (блок 201.4).
Обмотка возбуждения Е 1-Е 2 машины постоянного тока, используемой как нагрузочный генератор Г с независимым возбуждением, подключена к регулируемому выходу «ЯКОРЬ» блока источника питания 206.1.
16
17
201.4
L1
L2
L3
206.1
+
якорь
–
+
возбужд.
–
V
347.3
301.1
U1
V1
W1
Тг
E1
E2 |
A1 |
Г |
A2 |
V
A
АД
F1
F2
F3
506.3
n
В
0,002
мин–1
306.1
307
A
Рис. 2. Электрическая схема лабораторной работы 2
Машина постоянного тока используется как нагрузочный генератор Г, якорная цепь А1-А2 которого подключена к активной нагрузке (блок 306.1).
На валу двигателя АД установлен тахометрический датчик угловой скорости Тг, выход которого подключен к показывающему прибору, установленному на блоке 506.3.
В цепь якоря генератора Г включен амперметр, выходное напряжение генератора, снимаемое с якоря, контролируется вольтметром.
4. Методические указания по проведению исследования системы
4.1. Подготовка к работе
–удостовериться в том, что устройства, используемые в экспериментах, отключены от сети электропитания;
–собрать электрическую схему установки согласно рис. 2 и убедиться в правильности выполнения всех соединений;
–гнезда защитного заземления всех задействованных в экспериментах блоков соединить с гнездом «PE» блока 201.4.
–переключатель режима работы источника питания (блок 206.1) установить в положение «РУЧН»;
–регулировочную рукоятку на блоке 206.1, а также реостата на блоке 307 и активной нагрузки на блоке 306.1 повернуть против часовой стрелки до упора;
–переключателями в блоке 347.3 установить номинальные напряжения трансформаторов: первичные – 220 В, вторичные – 133 В.
4.2. Снятие семейства механических характеристик привода
Для снятия механических характеристик асинхронного двигателя с фазным ротором необходимо произвести следующую последовательность операций:
–включить 3-х фазный источник питания (блок 201.4);
–включить выключатели «СЕТЬ» на каждом из используемых блоков;
–нажатием кнопки «ВКЛ» на блоке 301.1 запустить двигатель АД;
–нажать кнопку «ВКЛ» на блоке 206.1;
–вращая регулировочную рукоятку блока 206.1, установить значение напряжения возбуждения нагрузочного генератора, равным 220 В;
18

–вращая регулировочные рукоятки нагрузки на блоке 306.1, ме-
нять ток якоря Iя генератора Г и заносить показания Iя, а также напряжения на якоре Uя и соответствующих им значений скорости вращения n в табл. 2.1.1
–по завершении эксперимента нажатием кнопки «ОТКЛ» на блоке 301.1 остановить двигатель;
–нажать кнопку «ОТКЛ» на блоке 206.1, а все рукоятки вернуть
висходные положения.
Поскольку в проведенном опыте сопротивления, включенные в цепь ротора, равнялись нулю (R1…R3 и R4…R6 на блоке 307 находились в крайнем положении против часовой стрелки), то снятая характеристика будет соответствовать характеристике двигателя с короткозамкнутым ротором.
Апотому далее следует:
–установить регулировочные рукоятки на блоке 307 – R1…R3 и R4…R6 в положение 3 и повторить предыдущий опыт; результаты занести в табл. 2.1.2;
–то же самое проделать для положений рукояток R1…R3 и R4…R6 на блоке 307 – 6 и 10; результаты опыта занести в табл. 2.1.3 и 2.1.4 соответственно;
По завершении эксперимента отключить питание от каждого из блоков установки и все рукоятки вернуть в исходные положения.
Далее следует пересчитать значения скорости с об/мин в рад/сек по формуле, рад/с
ω= 260πn ,
и вращающего момента М на валу двигателя по эмпирическому выражению, Нм
M = 260πn(U я −65 Iя ) Iя +0,22 .
Занести результаты расчетов в две нижние строки табл. 2.1.1, 2.1.2, 2.1.3 и 2.1.4 соответственно.
Таблица 2.1.1
I (А)
Uя (В)
n(об/мин)
ω(рад/с)
М (Нм)
19
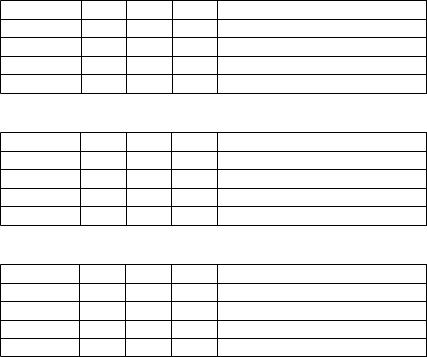
Таблица 2.1.2
Iя (А)
Uя (В)
n(об/мин)
ω(рад/с)
М (Нм)
Таблица 2.1.3
Iя (А)
Uя (В)
n(об/мин)
ω(рад/с)
М (Нм)
Таблица 2.1.4
Iя (А)
Uя (В)
n(об/мин)
ω(рад/с)
М (Нм)
По данным таблиц построить графики семейства механических характеристики привода
ω= f (М).
4.3.Реостатное регулирование скорости привода
Реостатное регулирование скорости осуществляется путем изменения сопротивления цепи ротора:
–включить установку в работу, подав напряжение питания на ее блоки;
–нажатием кнопки «ВКЛ» на блоке 301.1 запустить двигатель АД;
–нажать кнопку «ВКЛ» на блоке 206.1;
–вращая регулировочную рукоятку на блоке 206.1, установить значение напряжения возбуждения нагрузочного генератора, равным 220 В
ине менять его в ходе эксперимента;
20