

1.6. Понятие о непрерывных и прерывистых системах
Непрерывной системойавтоматического регулирования называется такая система, в которой при непрерывном изменении регулируемой величины происходит непрерывное изменение всех величин, характеризующих состояние системы.
Прерывистой системойавтоматического регулирования называется такая система, в которой хотя бы в одном звене нарушается непрерывное изменение какой-либо величины при непрерывном изменении регулируемой величины.
Прерывистые системы делятся на релейные и импульсные (дискретные) системы.
Релейной системойназывается такая система, в которой имеется звено со статической характеристикой релейного типа. Характеристика релейного типа представляет собой такую зависимость между выходной и входной величинами данного звена, когда при непрерывном изменении входной величины выходная меняется скачком при некоторых определенных значениях входной величины, а между ними остается постоянной.
Рассмотрим в качестве примера регулятор скорости электродвигателя небольшой мощности (рис. 1.9).При непрерывном изменении регулируемой величины Q происходит непрерывное перемещение S муфты центробежного механизма M. В определённом положении муфты замыкается контактK, который шунтирует сопротивление R, в результате чего сопротивление цепи возбуждения скачком уменьшится на величину R. При дальнейшем движении муфты М влево (при дальнейшем росте скорости) контакт будет оставаться замкнутым и сопротивление цепи возбуждения будет оставаться постоянным.
Снижение скорости вращения вызовет движение муфты М вправо. В некотором её положении также скачком при размыкании контакта происходит возрастание сопротивления цепи на величину R. В результате статическая характеристика муфты совместно с контактом может быть представлена так, как это изображено на рис.1.9.
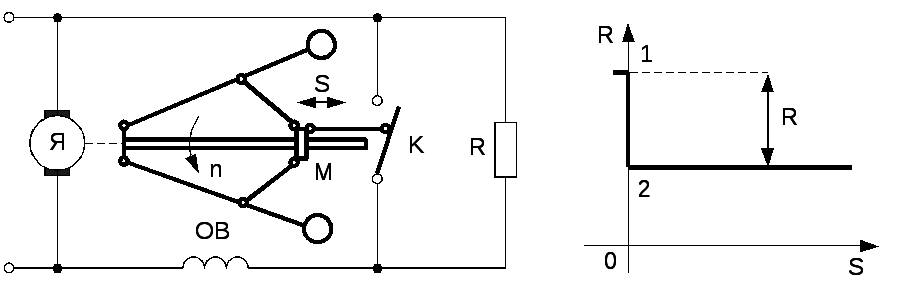
Рис. 1.9. Релейная система регулирования
Статические характеристики остальных звеньев этой системы являются непрерывными. Однако вся система должна рассматриваться как релейная.
Импульсной системойавтоматического регулирования называется такая система, в которой прерывистым звеном является импульсный элемент. Импульсный элемент это устройство, которое преобразует непрерывное изменение входной величины в отдельные, равностоящие друг от друга импульсы выходной величины.
Наиболее часто используются два типа импульсных элементов. Импульсные элементы первого типа формируют на выходе равностоящие импульсы одинаковой продолжительности, амплитуда которых пропорциональна входной величине. Импульсные элементы второго типа формируют на выходе импульсы одинаковой амплитуды, а продолжительность импульса пропорциональна входной величине. При этом знак импульса меняется при изменении знака входной величины.
Импульсный характер работы автоматической системы может быть обусловлен также применением в ней вычислительных машин.
Контрольные вопросы
1. Дайте понятие об автоматическом регулировании.
2. Сформулируйте задачи теории автоматического управления.
3. Охарактеризуйте разомкнутые и замкнутые САР.
4. Охарактеризуйте системы автоматической стабилизации (САР напряжения генератора постоянного тока).
5. Охарактеризуйте следящие системы.
6. Сформулируйте понятие о непрерывных и прерывистых САР.