

3 Розробка структури виявлення обєктів в
ОПТИКО-ЕЛЕКТРОННИХ СИСТЕМАХ СПОСТЕРЕЖЕННЯ
3.1 Виявлення сигналів в тракті прийому оптико-електронних систем відеоспостереження
Прийом та обробка сигналів в системах відеоспостереження, як правило, проводиться на фоні значного рівня завад, що маскують інформативні ознаки сигналів і в цілому спотворюють їхні параметри. При цьому, в більшості умов оптико-електронного спостереження (сканування, динамічний фон, статичні сторонні об'єкти), задачу виявлення сигналів від об'єктів, що не належать фону можливо вирішити тільки на відносно короткому етапі їх появи, а не на етапі їх присутності, як наприклад, в радіолокації, що значно відрізняє алгоритми оптимальної обробки в данних системах. Таким чином, в процесі прийому та обробки сигналів, необхідно вирішувати два основні завдання: виявити сигнал і вимірювати параметри корисних інформаційних складових в його об'ємі не припиняючи супроводження. Враховуючи особливості реалізації систем відеоспостереження, особливо в частині попередньої реєстрації і селекції сигналів, майже вся сукупність цих операцій виконується вже безпосередньо на етапі обробки прийнятої суміші сигналів[6]. Сформулюємо завдання виявлення сигналу на фоні перешкод наступним чином: на заданому інтервалі часу (0; Т) спостерігається напруга и(t), яка може бути або завадою (корисний сигнал на вході приймача відсутній), або сумішшю сигналу S(t) і завади п(t). Оперуючи деякими апріорними даними про статистичні характеристики завади і суміші сигналу з завадою, за допомогою алгоритму виявлення, необхідно вирішити, яка із двох зазначених ситуацій має місце.
Внаслідок випадкового характеру завади, а також можливих флуктуацій параметрів корисного сигналу, рішення прийняте виявлячем, може бути як правильним, так і помилковим. При цьому можливі наступні ситуації:
а) сигнал на вході приймача є, і ухвалюється рішення «сигнал є» (ситуація А11);
б) сигнал на вході приймача є, але видається рішення «сигналу немає» (ситуація А10 );
в) сигналу на вході приймача немає і ухвалюється рішення «сигналу немає» (ситуація А00);
г) сигналу на вході приймача немає, але видається рішення «сигнал є» (ситуація А01).
Ситуації А11 і А00 характеризують прийняття правильних рішень, в той час як виникнення ситуацій А10 і А01 свідчить про прийняття неправильних рішень.
Якість роботи виявлювача визначається саме ймовірністю правильного прийняття рішень, однак на практиці часто застосовується трохи інший підхід до оцінки якості приймання сигналу, який заснований на визначенні середнього ризику r. Кожній із зазначених ситуацій приписується певна величина - ризик наслідків, викликаних цією ситуацією[7]. Нехай r11-ризик правильного виявлення сигналу, r10 - ризик пропуску сигналу, r01 - ймовірність неправильного виявлення сигналу, r00 - ризик вірного невиявлення сигналу.
Оскільки виникнення кожної із цих ситуацій є випадковою подією, то практичний інтерес представляє середня вартість рішення, що видається виявлячем (середній ризик)
 (3.1)
(3.1)де P(AXX)- імовірності відповідних подій.
Вартості вірних рішень в даному випадку можна прийняти рівними нулю, тобто r11 = r00 = 0.
У цьому випадку середній ризик визначається виразом
 (3.2)
(3.2)Нехай р - ймовірність наявності сигналу від стороннього об'єкта в суміші на вході приймача, тоді
(3.3)


(3.4)
де
 - ймовірність пропуску;
- ймовірність пропуску; -
ймовірність неправильного виявлення
сигналу.
-
ймовірність неправильного виявлення
сигналу.В цьому випадку середній ризик буде визначатися виразом
 .
(3.5)
.
(3.5)Якщо величину
 замінити
рівною їй величиною
замінити
рівною їй величиною
 ,
де
,
де - ймовірність правильного виявлення
сигналу, то середній ризик можна записати
у вигляді
- ймовірність правильного виявлення
сигналу, то середній ризик можна записати
у вигляді ,
(3.6)
,
(3.6)де
 .
.Розглянута задача виявлення сигналу на фоні завад відповідає таким умовам, коли тривалість сигналу на вході приймача фіксована, тобто дослідження кожної окремої області простору проводиться протягом заздалегідь відомого певного відрізку часу. Можливий інший підхід до розв'язку поставленого завдання, при якому тривалість дослідження не задається заздалегідь, а визначається виявлячем виходячи з необхідної надійності прийнятих рішень. Даний метод є аналогічним методу послідовного спостерігача.
Ефективність методу послідовного спостерігача визначається ймовірностями РПВ і РПН, а також середньою тривалістю інтервалів спостереження Т1 при наявності сигналу і Т0 при його відсутності.
Будь-який метод виявлення сигналу на фоні завад представляє собою деяке правило R[u(t)], відповідно до якого реалізація вхідної напруги и(t) класифікується або як «сигнальна», що ототожнюється з наявністю сигналу, або як «несигнальна», що ототожнюється з його відсутністю.
Серед можливих методів виявлення особливий інтерес представляють так звані оптимальні методи, що задовольняють деяким вихідним вимогам критерію оптимальності. Найбільш загальним оптимальним методом є метод, що реалізує мінімум середнього ризику, однак у реальних умовах ймовірність появи сигналу р звичайно невідома, а визначення вартостей помилок r10, r01 є складним завданням.
У зв'язку із цим при практичній реалізації систем спостереження, в якості критерію оптимальності, прийнято використовувати так званий критерій Неймана-Пірсона, що забезпечує максимальну ймовірність правильного виявлення цілі при фіксованій ймовірності неправильного виявлення. У випадку використання послідовного виявляча оптимальним є метод, що забезпечує мінімум середніх значень інтервалів спостереження Т0 і Т1 при заданих ймовірностях РПВ і РПН. Оптимальна процедура аналізу сигналу при використанні послідовного виявляча виконується наступним чином. Якщо вхідна напруга задана сукупністю рівновіддалених відліків Um=(u1, и2,u3,...,ит) починаючи з т=1, після надходження на вхід виявлювана кожного чергового відліку напруги обчислюється відношення правдоподібності
 (3.7)
(3.7)де
 ,
, -
щільності ймовірності відліків
-
щільності ймовірності відліків відповідно принаявності і відсутності
сигналу.
відповідно принаявності і відсутності
сигналу.Для прийняття рішення вибираються два пороги порівняння А и В, причому А > В. Таким чином, можливі три випадки:
 > А - ухвалюється
рішення «сигнал є»;
> А - ухвалюється
рішення «сигнал є»; <
В - ухвалюється рішення «сигналу немає»;
<
В - ухвалюється рішення «сигналу немає»;В<
 <А
- рішення не ухвалюється, а виконується
наступний етап обробки, тобто обчислюється
<А
- рішення не ухвалюється, а виконується
наступний етап обробки, тобто обчислюється
 .
.
Граничні величини А і В можуть бути наближено визначені з наступних співвідношень
 (3.8)
(3.8) (3.9)
(3.9)Досить повним показником якості виявлення є також середній час існування об'єкту до виявлення при заданому середньому часі між неправильними виявленнями t0.
Таким чином, при постановці завдання щодо виявлення об'єктів на електронному зображенні, що перетворене за певним правилом, в послідовність дискретних відліків, в першу чергу необхідно визначитись з правилом прийняття оптимальних рішень, ефективність якого буде визначатись повнотою апріорної інформації.
3.2 Обробка сигналів в умовах апріорної невизначеності
В задачах оптико-електронного спостереження, виявлення сигналів найчастіше ведеться в умовах, коли статистичні характеристики заваді суміші сигналу з завадою відомі не повністю, а отже розглянуті методи можуть бути малоефективними.
Розглянемо можливі види апріорної невизначеності щодо розподілів W1(Um),W0(Um). Найрозповсюдженішим прикладом параметричної невизначеності є обробка сигналів на фоні гаусівського шуму невідомої потужності. Більшість запропонованих до теперішнього часу методів виявлення при не повністю відомих статистичних характеристиках сигналів і завад є евристичними. В умовах апріорної невизначеності особливу ефективність показують методи, що базуються на критеріях непараметричної статистики і які забезпечують постійне значення ймовірності РПВ. Подібні методи застосовуються в умовах як параметричної, так і непараметричної невизначеності. Крім того, одним зі шляхів подолання апріорної невизначеності є використання принципу адаптації. Даний принцип ґрунтується на одержанні відомостей про розподіли W1(Um), W0(Um) на етапі навчання, наприклад, на основі опорних реалізацій U0m, про які відомо, що вони є реалізаціями шуму.
Якщо апріорний розподіл ймовірностей часу появи об'єкту tц невідомий, то в якості критерію оптимальності доцільно використовувати умову забезпечення мінімального значення
 при фіксованому інтервалі
при фіксованому інтервалі .
При цьому допускається, щоtц>>
.
При цьому допускається, щоtц>> ,
тобто об'єкт з'являється у встановленому
режимі огляду, коли відносно рідко, з
середнім періодом
,
тобто об'єкт з'являється у встановленому
режимі огляду, коли відносно рідко, з
середнім періодом видаються
неправильні сигнали про появу об'єкту.
видаються
неправильні сигнали про появу об'єкту.Після кожного неправильного виявлення об'єкту пристрій обробки повертається в первісний стан, тобто в стан Un аналізуємої послідовності. Елементи послідовності Un є взаємно незалежними величинами з розподілом ймовірностей Р1(Un), Р0(Un) залежно від того, чи присутній об'єкт при n-му циклі огляду.
Нехай {Zn} - множина «сигнальних» послідовностей Zn довжиною п, з появою кожної з яких на вході виявляча ухвалюється рішення про присутність об'єкту. Якщо «сигнальні» послідовності визначені для всіх п, то цим самим визначене деяке вирішальне правило R(Zп). Таким чином, для оптимізації процесу виявлення об'єкту необхідно для всіх значень п знайти такі «сигнальні» множини, при яких виконуються умови оптимальності.
Розглянемо наступну подію: об'єкт з'являється в зоні спостереження між (k — 1)-м і k-м оглядами (кадрами) і виявляється в результаті надходження на вхід виявляча деякої послідовності
 ,
що
входить
в «сигнальну» множину
{Zn}.
Ймовірність даної події при прийнятих
припущеннях визначається за формулою[8]
,
що
входить
в «сигнальну» множину
{Zn}.
Ймовірність даної події при прийнятих
припущеннях визначається за формулою[8] (3.10)
(3.10)де n0 – середня кількість оглядів (кадрів) між суміжними неправильними виявленнями об'єкту. Якщо прийняти величину інтервалу між суміжними кадрами за одиницю часу, то n0=t0.
Час існування об'єкту до виявлення за умови реалізації розглянутої події дорівнює п-k+0.5, де інтервал 0,5 є середнім часом перебування об'єкту в зоні спостереження до моменту першого огляду. Середній час існування об'єкту до виявлення визначається виразом
 (3.11)
(3.11)де Мп - кількість різних «сигнальних» послідовностей, що входять у множину {Zn}.
Нехай Zn1=(Z11,Z21,…,Zn1) і Zn2=(Z12,Z22,…,Zn2) - дві можливі послідовності довжиною п такі, що
 (3.12)
(3.12)Розглянемо два варіанти формування «сигнальних» множин {Zn}, кожному з яких відповідає певний спосіб виявлення об'єкту. При першому способі послідовність Zп1 входить в «сигнальну» множину {Zn}, а послідовність Zп2 є складовою частиною (початком) деякої сукупності Q «сигнальних» послідовностей більшої довжини. Другий спосіб відрізняється від першого тим, що зазначені послідовності міняються місцями, тобто Zп2 входить в «сигнальну» множину {Zn}, а послідовність Zп1 є складовою частиною (початком) зазначеної вище сукупності Q «сигнальних» послідовностей більшої довжини, замінивши в них послідовність Zn2.
Внаслідок останньої рівності (3.12) послідовності Zп1 і Zп2 при відсутності об'єкту рівноймовірні. Тому при розглянутих способах виявлення, закони розподілу ймовірностей інтервалу t0 однакові.
Використовуючи формулу (3.11) визначається різниця
 ,
між значеннями часу існування об'єкту
до виявлення
при першому і другому способах виявлення.
При оцінці різниці
,
між значеннями часу існування об'єкту
до виявлення
при першому і другому способах виявлення.
При оцінці різниці
 слід врахувати, що складові правої
частини виразу (3.11)
які не містять послідовностей
Zп1
і
Zп2
мають однакові значення при обох
способах виявлення. Крім того, однакові
значення мають і доданки, які містять
послідовності
Zп1
і
Zп2,
якщо ці доданки відповідають індексу
k
>
п.
слід врахувати, що складові правої
частини виразу (3.11)
які не містять послідовностей
Zп1
і
Zп2
мають однакові значення при обох
способах виявлення. Крім того, однакові
значення мають і доданки, які містять
послідовності
Zп1
і
Zп2,
якщо ці доданки відповідають індексу
k
>
п.Відповідно до останніх зауважень, різниця
 ,
визначається з виразу
,
визначається з виразу ,
(3.13)
,
(3.13)де
 - одна з послідовностей, що доповнюють
послідовністьZп2,
при першому і послідовність
Zп1
при другому способах виявлення, до
однієї з «сигнальних» послідовностей
множини {Zn};
- одна з послідовностей, що доповнюють
послідовністьZп2,
при першому і послідовність
Zп1
при другому способах виявлення, до
однієї з «сигнальних» послідовностей
множини {Zn};М* - кількість послідовностей Z* при заданому значенні п. У перших фігурних дужках останнього виразу приведено складові величини t1, при першому способі виявлення, у других - при другому.
Аналізуючи отриманий вираз, легко можна виявити, що
 <
0 тільки тоді, коли послідовності
Zп1
і
Zп2
задовольняють
умові
<
0 тільки тоді, коли послідовності
Zп1
і
Zп2
задовольняють
умові (3.14)
(3.14)А отже, використовуючи отриманий вираз, можна сформулювати правило формування «сигнальних» множин {Zn}, п=1,2,... при яких забезпечується мінімум
 ,
при заданому розподілі ймовірностей
Р(t0)
інтервалу
t0
між неправильними виявленнями об'єкту.
При чому, це правило буде полягати в
наступному: «сигнальна» множина {Zn}
містить всі послідовності
Zп„
що задовольняють умові:
,
при заданому розподілі ймовірностей
Р(t0)
інтервалу
t0
між неправильними виявленнями об'єкту.
При чому, це правило буде полягати в
наступному: «сигнальна» множина {Zn}
містить всі послідовності
Zп„
що задовольняють умові: (3.15)
(3.15)де константа Сп вибирається таким чином, щоб ймовірність виконання умови (3.15) при відсутності об'єкту, дорівнювала заданому значенню ймовірності Р(t0=п).
При фіксованому значенні ймовірності Р(t0=п) будь-яка сигнальна множина, що не співпадає повністю із визначеною нерівністю (3.15) буде містити послідовності Zп„ при яких
 (3.16)
(3.16)а це відповідно (3.14) призведе лише до збільшення
 .
.Таким чином, при розв'язанні задачі виявлення сторонніх об'єктів в системах відеоспостереження, вага ймовірності пропуску сигналу в загальній ефективності алгоритму обробки сигналів значно вище ніж при вирішенні задач радіолокації чи в асинхронних системах передачі даних, оскільки період огляду в таких системах є не одновимірним. В результаті, при незначному коливанні значень середнього часу не виявлення
 ,
границя між умовами (3.15)
та (3.16)
стає нечіткою і постає гостра необхідність
зниження значення
Сп,
що в даних умовах є небажаним.
,
границя між умовами (3.15)
та (3.16)
стає нечіткою і постає гостра необхідність
зниження значення
Сп,
що в даних умовах є небажаним.3.3 Удосконалення алгоритмів виявлення в оптико-електронних системах спостереження
Як стало видно із останніх виразів, в системах відеоспостереження застосовувати класичні методи побудови оптимальних виявлячів недоцільно, в першу чергу через те, що при обробці сигналів з виходу відеореєстратора є певні особливості в співвідношенні часових інтервалів огляду і наявності об'єктів. Основним індикатором цих особливостей, є висока залежність ймовірності виявлення об'єкту від середнього часу не виявлення, при знаходженні його в зоні спостереження. А отже, за таких умов, метод виявлення об'єкту, що з'являється в невизначений момент часу
 і при якому, для заданого розподілу
ймовірностей
Р(t0),
середній час існування об'єкту до
виявлення найменший,
полягає в наступному: при кожному
значенні n=1,2,3,
обчислюється величина відношення
правдоподібності
і при якому, для заданого розподілу
ймовірностей
Р(t0),
середній час існування об'єкту до
виявлення найменший,
полягає в наступному: при кожному
значенні n=1,2,3,
обчислюється величина відношення
правдоподібності
 ,
що визначається з виразу
,
що визначається з виразу (3.17)
(3.17)де
 -
відношення правдоподібності для множини
-
відношення правдоподібності для множини відліків
сигналу при наявності об'єкту в зоні
спостереження, рішення про появу об'єкту
приймається, якщо при деякому
п
ця величина перевищує поріг
Сп.
відліків
сигналу при наявності об'єкту в зоні
спостереження, рішення про появу об'єкту
приймається, якщо при деякому
п
ця величина перевищує поріг
Сп.Величину
 в
даному випадку, можна записати в
наступному вигляді
в
даному випадку, можна записати в
наступному вигляді (3.18)
(3.18)де
 (3.19)
(3.19) (3.20)
(3.20)Оскільки
 (3.21)
(3.21)то з формули (3.18) отримуємо
 (3.22)
(3.22)
Рисунок 3.1 - Структурна схема пристрою виявлення сторонніх об'єктів на
відеозображенні
Відповідно цього співвідношення, оптимальний пристрій виявлення об'єкту при реалізації системи відеоспостереження, містить перемножувач, суматор, пристрій пам'яті, і попроговий пристрій (рисунок 3.1).
В даній структурі, запам'ятовуючий пристрій зберігає вихідну величину перемножувача протягом періоду проходження відліків послідовності Zn, реалізуючи рекурентність обробки, а пороговий пристрій виробляє сигнал наявності цілі, якщо вихідна величина
 перевищує
поріг
Сп.
перевищує
поріг
Сп.Описаний метод виявлення відповідає таким умовам, при яких об'єкт, з'явившись у зоні спостереження, залишається в ній до виявлення. Якщо час перебування об'єкту обмежений і дорівнює r періодам огляду (кадрам), то нижню межу суми по k слід прийняти рівною n — r + 1. При цьому в виявлячі при кожному значенні п обчислюється і порівнюється з порогом Сп величина
 (3.23)
(3.23)Останній вираз можна записати у вигляді
 (3.24)
(3.24)де
 (3.25)
(3.25)Пристрій виявлення об'єктів для розглянутих умов відрізняється від попереднього додатковим блоком пам'яті і схеми віднімання (рис. 3.2).

Рисунок 3.2 – Структурна схема пристрою виявлення при обмеженому часі перебування об'єкту в зоні спостереження
Запам'ятовуючий пристрій призначений для зберігання величини
 протягом
r
періодів огляду. Цей блок повинен мати
r-1
комірок пам'яті для зберігання наступних
величин:
протягом
r
періодів огляду. Цей блок повинен мати
r-1
комірок пам'яті для зберігання наступних
величин:
 ,
, ,..,
,.., .
Схема віднімання формує різницю
.
Схема віднімання формує різницю величин
величин і
і ,
перша з яких надходить із виходу
перемножувача а друга з блоку пам'яті.
,
перша з яких надходить із виходу
перемножувача а друга з блоку пам'яті.Запропонований метод виявлення об'єктів передбачає необхідність включення в обчислення при кожному значенні n, величину
 усіх
відліків спостережуваної послідовностіZn,
починаючи з n=1.
Якщо об'єкт з моменту появи і до виявлення
може перебувати в різних елементах
розрізнення контрольованої зони, то
кількість можливих траєкторій об'єкту,
для кожної з яких у пристрої виявлення
повинна обчислюватися величина
відношення правдоподібності, може бути
дуже великою, а пристрій виявлення
занадто складним.
усіх
відліків спостережуваної послідовностіZn,
починаючи з n=1.
Якщо об'єкт з моменту появи і до виявлення
може перебувати в різних елементах
розрізнення контрольованої зони, то
кількість можливих траєкторій об'єкту,
для кожної з яких у пристрої виявлення
повинна обчислюватися величина
відношення правдоподібності, може бути
дуже великою, а пристрій виявлення
занадто складним.У зв'язку з цим, замість рекурентного співвідношення (3.22) можна використати спрощений варіант
 (3.26)
(3.26)При цьому, рішення про появу об'єкта видається в тому випадку, коли
 ,
де поріг
С
не залежить від
n
і вибирається виходячи з необхідності
забезпечення заданого значення
,
де поріг
С
не залежить від
n
і вибирається виходячи з необхідності
забезпечення заданого значення
 .
.Перехід до даного співвідношення заснований на використанні правила «відбору більшого значення». Дане правило полягає в тому, що
 приймається
найбільшим із двох:
приймається
найбільшим із двох: або
або .
Перша із цих величин представляє собою
коефіцієнт правдоподібності, що
відповідає гіпотезі «об'єкт з'явився
між
(п-1)-м
і n-м
періодами огляду». Друга дорівнює
найбільшому з
п-1
коефіцієнтів правдоподібності, кожний
з яких відповідає одній з наступних
гіпотез: «об'єкт з'явився перед першим
оглядом», «об'єкт з'явився перед другим
оглядом», ... «об'єкт з'явився перед
(п-1)-м
оглядом». Таким чином, вираз (3.26)
визначає найбільший з
п коефіцієнтів
правдоподібності, кожний з яких
відповідає або одній з перерахованих
гіпотез, або гіпотезі «об'єкт з'явився
перед
п-м
оглядом».
.
Перша із цих величин представляє собою
коефіцієнт правдоподібності, що
відповідає гіпотезі «об'єкт з'явився
між
(п-1)-м
і n-м
періодами огляду». Друга дорівнює
найбільшому з
п-1
коефіцієнтів правдоподібності, кожний
з яких відповідає одній з наступних
гіпотез: «об'єкт з'явився перед першим
оглядом», «об'єкт з'явився перед другим
оглядом», ... «об'єкт з'явився перед
(п-1)-м
оглядом». Таким чином, вираз (3.26)
визначає найбільший з
п коефіцієнтів
правдоподібності, кожний з яких
відповідає або одній з перерахованих
гіпотез, або гіпотезі «об'єкт з'явився
перед
п-м
оглядом».Характер зміни величини
 в області її значень менших одиниці,
можна не фіксувати в процесі обробки,
тобто при
в області її значень менших одиниці,
можна не фіксувати в процесі обробки,
тобто при
 вважається
вважається
 .
.Таким чином, «сигнальна» множина буде містити у собі всі послідовності Zn , що задовольняють умові
 ,(3.27)
,(3.27)де
 . (3.28)
. (3.28)Особливість розглянутого методу виявлення об'єкту полягає в тому, що величина
 ухвалює значення, що дорівнює одиниці,
якщо при деякому
п
виконується умова
ухвалює значення, що дорівнює одиниці,
якщо при деякому
п
виконується умова
 .
При цьому послідовність
Zn
виключається
з обробки. Зазначена
особливість призводить до істотного
спрощення пристрою обробки при виявленні
рухомих об'єктів.
.
При цьому послідовність
Zn
виключається
з обробки. Зазначена
особливість призводить до істотного
спрощення пристрою обробки при виявленні
рухомих об'єктів.Замість величини
 у пристрої простіше
обчислювати її логарифм
у пристрої простіше
обчислювати її логарифм
 і
порівнювати його з порогом
lgС.
Логарифмуючи обидві частини виразу,
одержуємо:
і
порівнювати його з порогом
lgС.
Логарифмуючи обидві частини виразу,
одержуємо: (3.29)
(3.29)де
 (3.30)
(3.30)Описаний метод виявлення тотожний з методом послідовного спостерігача у випадку, коли нижній поріг дорівнює одиниці. Пристрій виявлення об'єкту при використанні даного методу містить блок формування величини
 ,
суматор, блок пам'яті і пороговий
пристрій (рисунок
3.3).
,
суматор, блок пам'яті і пороговий
пристрій (рисунок
3.3). Рисунок
3.3 –
Структурна
схема пристрою
виявлення об'єкту методом послідовного
аналізу
Рисунок
3.3 –
Структурна
схема пристрою
виявлення об'єкту методом послідовного
аналізуВідповідно данної схеми, в суматорі проводиться додавання величин
 і
і .
Якщо сума цих величин
.
Якщо сума цих величин від'ємна, то її
значення приймається нульовим. Пороговий
пристрій видає сигнал про наявність
об'єкту, якщо
від'ємна, то її
значення приймається нульовим. Пороговий
пристрій видає сигнал про наявність
об'єкту, якщо
 .
.Підсумовуючи викладене, слід зазначити, що при виявленні стороннього об'єкту на електронному зображенні, поряд з розглянутими методами можуть використовуватися так звані серійні критерії виявлення. В останньому випадку рішення про появу об'єкту, що видається після надходження у виявляч відліку Zп,визначається к відліками послідовності Zn =zп-k+1, zп-k+2, , де k - задане число. Порівняння запропонованого методу послідовного аналізу і серійних критеріїв показує, що цей метод забезпечує значно менший час Сn при виявленні слабких сигналів.
3.4 Структура оптико-електронної системи та особливості представлення електронного зображення в дискретній формі
Широке застосування цифрових технологій при реалізації систем відеоспостереження, практично зняло обмеження на їх динамічний діапазон в відношенні освітленості об'єктів спостереження. При цьому, застосування відеокамер з вбудованими модулями аналогово-цифрового перетворення дало змогу значно підвищити завадостійкість каналів передачі відеоінформації на відстань і як наслідок усунути зашумленість зображень, що з'являється при їх передачі. Найчастіше такі камери забезпечуються також вбудованими схемами керування чутливістю, фокусуванням і іншими параметрами, які можуть контролюватися як самим вбудованим модулем, так і ЕОМ. Структурна схема системи відеоспостереження в цьому випадку буде мати вигляд, що показаний на рисунку 3.4.

Рисунок 3.4 – Структурна схема системи відеоспостереження
Для формалізації зображення об'єктів, що перебувають в полі зору відеокамери і формуються на поверхні світлочутливого елементу у вигляді плоского дискретного світлового поля, в довільний момент часу, можна представити в вигляді кінцевого набору величин освітленості елементів ПЗЗ- матриці[3]. У випадку використання монохромних відеокамер зображення представляється у вигляді функції яркісної компоненти
Y Y (x, y). (3.31)
При використанні кольорових відеокамер необхідно характеризувати значення величин трьох основних колірних складових - червоної, зеленої й синьої
R R (x, y), (3.32)
G G (x, y), (3.33)
B B (x, y). (3.34)
У силу того, що вимірювання зазначених величин проводиться за допомогою аналого-цифрового перетворювача, значення функцій , так само як і їхні аргументи будуть дискретними.
Розрядність АЦП, що використовується визначається загальними вимогами до точності системи, зокрема ймовірним динамічним діапазоном освітленості.
3.5 Аналогово-цифрове перетворення в оптико-електронних системах спостереження
При традиційному аналого-цифровому перетворенні відбувається квантування напруги повної шкали та вхідного спектру аж до половини частоти Найквіста (в даному випадку представляє собою еквівалентну частоту вибірки АЦП), як показано на рисунку 3.5. Вся область, обмежена червоною лінією, являє собою простір, який не заповнюється миттєво сигналом в області амплітуд (рис. 3.5а). Квантування цього порожнього простору призводить до низької енергоефективності. На рисунку 3.5б показано, як використовуються підсистеми компресії-декомпресії для того, щоб виконувати перетворення виключно сигналу, що призводить до істотного покращення енергоефективності. Подібним же чином у звичайних АЦП оцифровка сигналу по частоті також неефективна, оскільки сигнал не завжди займає весь спектр частот аж до половини частоти Найквіста, а в більшості випадків розташований в області частот. Новий підхід здатний визначити, що є порожні ділянки спектру, які не заповнюються миттєво сигналом, в результаті чого квантування спектра сигналу виконується з високою енергоефективністю.

а) звичайне квантування по амплітуді б) квантування по амплітуді з стисненням
Рисунок 3.5 – Квантування сигналу по амплітуді
Компресійний АЦП забезпечує переваги при роботі сигналами. Для цього розглянемо інтегральну функцію розподілу сигналу з розподілом Релея, показаного на рисунку 3.6. Більшу частину часу амплітуда такого сигналу підтримується на рівні, в чотири рази меншому середньої амплітуди повної шкали, щоб уникнути відсічення сигналу. Як можна бачити з графіка, більше 85% часу амплітуда такого сигналу складає менше 0,5 В, тому компресійний АЦП повинен забезпечити значні переваги.

Рисунок 3.6 – Інтегральна функція розподілу сигналу
3.6. Побудова дискретної математичної моделі електронного зображення
Сигнал, що отримується в результаті спостережень, крім корисної інформації містить різного роду завади і шуми. Основними причинами шумів стають різного роду випадкові флуктуації, які адитивно і мультиплікативно взаємодіють між собою як на шляху розповсюдження оптичних променів так і в процесі їх перетворення в електричний струм. В загальному випадку, враховуючи всі фактори ці шуми можна вважати випадковими процесами.
В засобах оптико-електронного та тепловізійного спостереження, основною величиною, що вимірюється є освітленість точок зображення, перетворена у величину напруги за допомогою світлочутливих матриць, які на сьогоднішній день, широко виготовляються на основі пристроїв із зарядовим зв'язком (ПЗЗ) [5].
У цифрових системах відеоспостереження дана величина за допомогою аналого-цифрового перетворювача представляється у вигляді цифрового
коду, що зазвичай складається із цілих чисел у діапазоні 12N1, де N – розрядність АЦП.
Корисним сигналом у цьому випадку є величина
Y Ym Y0 , (3.31)
де Ym Ym (x, y) освітленість в точці (x, y) поточного зображення.
Y Y (x, y) - розподіл освітленості еталонного зображення. Враховуючи дискретну структуру зображення і дискретність моментів часу вимірювання, припустимо, що поява і зникнення сторонніх об'єктів на відеозображенні відбувається моментально, а їх освітленість постійна протягом усього часу
присутності в даній точці. Таким чином, корисний сигнал Y Y (x, y) можна представити у вигляді прямокутного імпульсу невідомої тривалості.
За відсутності шумів порівняння величини Y з деяким порогом T 0
Y T. (3.32)
Є цілком достатньою процедурою для визначення присутності стороннього об'єкту в даній точці зображення. Проте, вимірювана величина Ym окрім корисної інформації містить шумову складову

 .
(3.33)
.
(3.33)На сьогодні відомі оптимальні розв'язки для заданих форм сигналів і
шумів [5,6]. Припустимо, що компонента
 характеризує
собою
білий
шум
і
розглянемо
задачу
виявлення
корисного
сигналу
на
його
фоні.
На
відміну
від
детермінованих
процесів,
відновлення
часової
динаміки
випадкового
процесу
по
його
спектральній
характеристиці
не
можливе.
Тому
необхідно
досліджувати
статистичну
характеристику
випадкового
процесу
–
його
автокореляційну
функцію.
характеризує
собою
білий
шум
і
розглянемо
задачу
виявлення
корисного
сигналу
на
його
фоні.
На
відміну
від
детермінованих
процесів,
відновлення
часової
динаміки
випадкового
процесу
по
його
спектральній
характеристиці
не
можливе.
Тому
необхідно
досліджувати
статистичну
характеристику
випадкового
процесу
–
його
автокореляційну
функцію.Автокореляційна функція випадкового процесу Ym
 ,
(3.34)
,
(3.34)де
 -
двомірна функція розподілу ймовірності,
пов'язана перетворенням Фур'є зі своїм
спектральним розподілом щільності.
-
двомірна функція розподілу ймовірності,
пов'язана перетворенням Фур'є зі своїм
спектральним розподілом щільності. .
(3.35)
.
(3.35)Дана функція характеризує потужність випадкового процесу, що приходиться на заданий інтервал частот. Внаслідок парності автокорреляційної функції (3.34), її спектральна щільність (3.35) є дійсною функцією.
Середня потужність випадкового процесу визначається виразом
 .
(3.36)
.
(3.36)Значно простіше вирішувати задачу виявлення в умовах присутності білого шуму, який в дійсності, є ідеалізованим випадковим процесом з автокореляційною функцією, що визначається дельта-функцією Дірака з безкінечною дисперсією. А отже, вреальному випадку,коли спектральна щільність потужності випадкового процесу постійна лише в розглянутому кінцевому діапазоні частот, введення такої ідеалізації дає змогу достатньо легко застосувати оптимальні методи фільтрації.
Приведені визначення стосуються тільки спектральної характеристики випадкового процесу, проте закони розподілу білого шуму можуть бути різними. Спектральний опис випадкового процесу є зручним при розгляді впливу на нього амплітудно-частотних характеристик різних електричних кіл та пристроїв. Так, при проходженні випадкового процесу через лінійну систему, можна показати, що спектральні щільності потужності випадкового процесу на вході
 і
на виході
і
на виході
 лінійної
системи пов'язані наступним співвідношенням
лінійної
системи пов'язані наступним співвідношенням
 ,
(3.37)
,
(3.37)де
 -
комплексний коефіцієнт передачі
лінійної системи.
-
комплексний коефіцієнт передачі
лінійної системи.3.7 Синтез оптимального фільтра
Оцінимо можливу ефективність виявлення неперіодичного сигналу при його адитивній суміші з білим шумом. При постановці завдання знаходження коефіцієнта передачі оптимального фільтра,використовуються наступні вагомі припущення про характер корисного сигналу: вважається відомою форма сигналу
 і сигнал єфінітним в часі
і сигнал єфінітним в часі (3.38)
(3.38)Оптимальним фільтром у даному випадку буде фільтр, що забезпечує максимальне відношення пікової потужності сигналу до потужності шуму в момент закінчення імпульсу. Комплексний коефіцієнт передачі такого оптимального фільтра прямо визначається спектром заданого, що підлягає виявленню сигналу. При виявленні сигналу на фоні шуму найбільшого застосування отримав критерій максимуму відношення сигнал/шум на виході фільтра. Для цього потрібно синтезувати фільтр, що забезпечує в заданий момент часу одержання найбільшого можливого відношення пікового значення сигналу до середньоквадратичного значення шуму. Як правило, в задачах виявлення сигналів, збереження форми сигналу не потрібно, тому що для виявлення в шумах форма сигналу значення не має. Будемо вважати, що сигнал детермінований, з відомими часовою функцією
 ,
а отже і спектральною
,
а отже і спектральною .
Шум будемо вважати стаціонарним
процесом з рівномірним енергетичним
спектром, тобто шум будемо вважати
"білим " зі спектральною щільністю
потужності
.
Шум будемо вважати стаціонарним
процесом з рівномірним енергетичним
спектром, тобто шум будемо вважати
"білим " зі спектральною щільністю
потужності .
.Завдання створення такого оптимального фільтра вирішується у два етапи:
а) визначення його комплексного коефіцієнта передачі
 ;
;б) визначення структури (схеми) фільтра і його параметрів.
Коефіцієнт
 може
бути знайдений для будь-якого фізично
реалізованого
сигналу. Другий етап більш
складний.
Необхідно оцінити умови фізичної
реалізуємості оптимального фільтра,
що розробляється. Перейдемо до
конкретного розв'язку першого етапу
- визначення оптимального коефіцієнта
передачі фільтра в зазначеному вище
сенсі для
заданого сигналу і при "білому"
шумі. Представивши сигнал у вигляді
інтеграла Фур'є
може
бути знайдений для будь-якого фізично
реалізованого
сигналу. Другий етап більш
складний.
Необхідно оцінити умови фізичної
реалізуємості оптимального фільтра,
що розробляється. Перейдемо до
конкретного розв'язку першого етапу
- визначення оптимального коефіцієнта
передачі фільтра в зазначеному вище
сенсі для
заданого сигналу і при "білому"
шумі. Представивши сигнал у вигляді
інтеграла Фур'є ,
(3.40)
,
(3.40)де
 -
фазова характеристика спектру сигналу.
-
фазова характеристика спектру сигналу.Комплексний коефіцієнт передачі фільтра можна представити у вигляді
 .
(3.41)
.
(3.41)Тоді сигнал на виході фільтра визначається з виразу
 .
(3.42)
.
(3.42)Припустимо, що пік сигналу на виході фільтру отримується в момент t0 (поки що невідомий).
 .
(3.43)
.
(3.43)Проведемо оцінку потужність шуму на виході цього фільтру, відповідно виразу
 .
(3.44)
.
(3.44)Як відомо ефективна, середньоквадратична напруга шуму дорівнює
 .
Отже, відношення пікового значення
сигналу до напруги шуму визначається
як
.
Отже, відношення пікового значення
сигналу до напруги шуму визначається
як .
(3.45)
.
(3.45)Таким чином, подальша задача полягає в знаходженні коефіцієнта передачі фільтра, який забезпечує максимум правої частини виразу (3.45). Скористаємося нерівністю Шварца. Для чисельника виразу (3.45) можна записати
 .
(3.46)
.
(3.46)Використовуючи (3.45), нерівність (3.46) можна записати так
 .
(3.47)
.
(3.47) Звідси видно, що відношення сигнал/шум досягає максимуму, коли нерівність (3.47) перетворюється в рівність. Оскільки права частина не залежить від В(а), для цього необхідно виконання двох умов:
 .Звідки
.Звідки
 ;
;Щоб
 ,
де А
- постійний
коефіцієнт.
,
де А
- постійний
коефіцієнт.
Звідси випливає, що коефіцієнт передачі оптимального фільтра повинен мати вигляд
 .
(3.48)
.
(3.48)Слід зазначити, що
 є
спектральною функцією,
комплексно
спряженою зі спектральною функцією
сигналу. А отже оптимальний коефіцієнт
передачі фільтра може бути визначений
наступним чином
є
спектральною функцією,
комплексно
спряженою зі спектральною функцією
сигналу. А отже оптимальний коефіцієнт
передачі фільтра може бути визначений
наступним чином .
(3.49)
.
(3.49)Зазначимо, що оскільки Вопт безрозмірна функція, то коефіцієнт А повинен мати розмірність зворотну розмірності спектру. З формули (3.49) випливає, що
 .
Оптимальний фільтр повинен пропускати
спектральні
складові шуму нерівномірно, з тим
більшим ослабленням, чим менше модуль
спектру сигналу. У результаті повна
потужність шуму буде меншою, чим при
рівномірній амплітудній характеристиці.
Доданок фазової характеристики
.
Оптимальний фільтр повинен пропускати
спектральні
складові шуму нерівномірно, з тим
більшим ослабленням, чим менше модуль
спектру сигналу. У результаті повна
потужність шуму буде меншою, чим при
рівномірній амплітудній характеристиці.
Доданок фазової характеристики
 компенсує фазові зсуви в спектрі
сигналу. Доданок
компенсує фазові зсуви в спектрі
сигналу. Доданок забезпечує
появу піку вихідного сигналу в моментt0,
тобто затримку вихідного сигналу
відносно його початку на вході. Тільки
за умови t0
>
Т може
бути використана вся енергія сигналу,
що має тривалість
Т,
для створення найбільшого можливого
піку в моменті
t
= t0.
Очевидно, що подальше збільшення
затримки не впливає на величину піку.
Якщо сигнал має спектр
забезпечує
появу піку вихідного сигналу в моментt0,
тобто затримку вихідного сигналу
відносно його початку на вході. Тільки
за умови t0
>
Т може
бути використана вся енергія сигналу,
що має тривалість
Т,
для створення найбільшого можливого
піку в моменті
t
= t0.
Очевидно, що подальше збільшення
затримки не впливає на величину піку.
Якщо сигнал має спектр .
(3.50)
.
(3.50)А функція
 ,
(3.51)
,
(3.51)є комплексно спряженою йому функцією, то можна показати, що комплексний коефіцієнт передачі оптимального фільтра визначається наступним чином
 .
(3.52)
.
(3.52)Маючи на увазі, що фазова характеристика коефіцієнта передачі є
 ,
бачимо, що
,
бачимо, що ( компенсує фазові зсуви спектру
сигналу, що формує «пік» імпульсу на
виході, а лінійна функція
( компенсує фазові зсуви спектру
сигналу, що формує «пік» імпульсу на
виході, а лінійна функція забезпечує
затримку цього «піку» на час тривалості
сигналу, тобто цей пік припадає на
момент закінчення сигналу. Можна
сказати, що забезпечується накопичення
корисного сигналу на інтервалів сього
часу існування імпульсу.
забезпечує
затримку цього «піку» на час тривалості
сигналу, тобто цей пік припадає на
момент закінчення сигналу. Можна
сказати, що забезпечується накопичення
корисного сигналу на інтервалів сього
часу існування імпульсу.Формула (3.52) встановлює також, що модуль коефіцієнта передачі повинен збігатися з модулем спектральної щільності функції заданого сигналу, тобто оптимальний фільтр послаблює спектральні складові шуму тем сильніше, чим менше модуль
 .
У результаті, повна потужність шуму
на виході фільтру виявляється меншою,
чим при рівномірній АЧХ.
.
У результаті, повна потужність шуму
на виході фільтру виявляється меншою,
чим при рівномірній АЧХ.Розглянемо процес синтезу оптимального фільтру для виявлення прямокутного імпульсу на фоні білого шуму й оцінимо величину відношення сигнал/шум при проходженні прямокутного імпульсу через такий фільтр.
Форма імпульсу, за таких умов, задається наступним виразом
 (3.53)
(3.53)Будемо вважати, що корисний сигнал представляє собою одиночний прямокутний імпульс тривалістю
 і амплітудою U0
(рисунок 3.4).
і амплітудою U0
(рисунок 3.4).
Рисунок 3.4 – Прямокутний імпульс
Спектральна щільність такого сигналу описується функцією
 ,
(3.54)
,
(3.54)і спряженою функцією
 .
(3.55)
.
(3.55)Для даного імпульсу відповідно до (3.52) оптимальний коефіцієнт передачі фільтра визначається як
 .
(3.56)
.
(3.56)Такий коефіцієнт передачі може бути реалізований схемою, що містить ідеальне інтегруючеколо, лінію затримки і схему віднімання (рисунок 3.5).
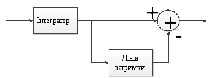
Рисунок 3.5 – Структурна схема оптимального фільтра
Знайдемо сигнал на виході оптимального фільтра для розглянутого прикладу (а=1)
 .
(3.57)
.
(3.57)Таким чином, імпульс на виході має трикутну форму з основою
 і має максимальне значення при
і має максимальне значення при
 (рисунок
3.6).
(рисунок
3.6).
Рисунок 3.6 – Сигнал на виході оптимального фільтра
Висновки:
Основною задачою обробки сигналів у системах оптико-електронного спостереження є виявлення корисного сигналу і вимірювання його параметрів на фоні шуму. При цьому особливе значення мають методи, що задовільняють деякій істотній, в даних умовах спостереження вимозі, що представляє собою критерій оптимальності.
При відомих апріорних характеристиках сигналу і суміші сигналу з шумом, оптимальна процедура виявлення сигналу зводиться до обчислення і порівняння з прийнятим порогом відношення правдоподібності, який на відміну від відомих передбачає розрахунок його значення в інтервалі часу (кількості кадрів), що задовільняє умові мінімального часу невиявленого існування об'єкта в площині електронного зображення.
При відсутності повної апріорної інформації про структуру сигналу і шуму необхідні відомості отримуються при порівнянні зображень сусідніх кадрів на етапі навчання на основі відомих реалізацій шуму або суміші сигналу із шумом.
У якості критерію оптимальності для оптико-електронних систем, що реалізують послідовний аналіз сигналу, необхідно приймати середній час не виявленого існування об'єкту при заданому середньому періоді неправильного спрацьовування системи.