

АЕПТВМ КП / КП. Водовозов 2004 Курсовое проектирование Электропривода
.pdfВ.М. Водовозов
Курсовое проектирование
ЭЛЕКТРОПРИВОДА
Издательство СПбГЭТУ «ЛЭТИ» Санкт-Петербург
Министерство образования и науки РФ
_______
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»
__________________________________________________________________
В.М. Водовозов
Курсовое проектирование электропривода
Учебное пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2004
УДК 62–83 (075.8)
Водовозов В.М. Курсовое проектирование электропривода: Методические указания. – СПб, Изд-во СПбГЭТУ «ЛЭТИ», 2004. – 30 с.
Рассмотрены вопросы проектирования электроприводов переменного и
постоянного тока, их силовой части и систем управления.
Для студентов, обучающихся по специальности «Электропривод и автоматизация промышленных установок и электротехнических комплексов», и инженерно-технических работников, занятых проектированием и эксплуатацией
автоматических систем.
© Водовозов В. М., 2004
Оглавление |
|
Предисловие .......................................................................................... |
4 |
Содержание курсового проекта............................................................ |
5 |
Расчет рабочего цикла .......................................................................... |
7 |
Расчет приводных механизмов ............................................................ |
8 |
Суппорт....................................................................................................................... |
9 |
Подъемник.................................................................................................................. |
9 |
Тележка и рольганг.................................................................................................... |
9 |
Конвейер..................................................................................................................... |
9 |
Стол........................................................................................................................... |
10 |
Тельфер.................................................................................................................... |
10 |
Расчет и выбор редукторов ................................................................. |
10 |
Расчет и выбор двигателей.................................................................. |
11 |
Расчет и выбор преобразователя......................................................... |
13 |
Проектирование системы управления ................................................ |
14 |
Расчет электропривода с контурами скорости и положения................................ |
14 |
Расчет электропривода с контурами тока и скорости........................................... |
16 |
Наладка модели электропривода........................................................................... |
17 |
Программа eDrive ................................................................................. |
17 |
Назначение и состав программы............................................................................ |
17 |
Работа с моделями.................................................................................................. |
18 |
Вкладка Двигатель................................................................................................... |
19 |
Вкладка Источник..................................................................................................... |
19 |
Вкладка Механизм ................................................................................................... |
20 |
Вкладка Регулятор................................................................................................... |
20 |
Моделирование........................................................................................................ |
21 |
Масштабирование и документирование результатов........................................... |
22 |
Подключение к базе данных.................................................................................... |
23 |
Работа с таблицами и запросами........................................................................... |
24 |
Окно Сигналы........................................................................................................... |
25 |
Настройка и задание параметров........................................................................... |
27 |
Приложение.......................................................................................... |
28 |
Ориентировочные значения КПД механических передач..................................... |
28 |
Ориентировочные значения коэффициентов трения............................................ |
28 |
Список литературы.............................................................................. |
29 |
4
Предисловие
Мыслители и мастера прошлого относили инженерную деятельность к кате-
гории искусств и считали ее невозможной без творческого подхода и вдохновения. Курсовое проектирование представляет именно тот этап инженерной подготовки,
на котором каждому предоставляется возможность испытания и развития личного творческого потенциала.
Курсовое проектирование может доставить как удовлетворение, так и раз-
очарование. Часто это зависит даже не от результата и оценки, а от самого процесса разработки, от взаимного соотношения его творческой и рутиной составляющих. «Кто не потрудился как следует, чтобы добыть желаемое, тот не получит
радости обладания», считал Конан Дойль. Для успешного выполнения работы попробуйте следующее:
•понять задание так, чтобы грамотно и в максимальном объеме определить условия и возможные пути решения;
•не настраиваться на получение результата с первого захода, а преду-
смотреть ряд итераций, ведущих к цели, учитывая, что «опыт – это ошибки» (А. Блок), а методические указания – не кулинарная книга;
•поискать наиболее рациональные и технологичные средства, отвечающие поставленной задаче, избегая при этом слепого перебора вариантов;
•научиться обнаруживать и отбрасывать тупиковые варианты;
•продумать и просчитать решение настолько, чтобы быть готовым к его защите.
Постарайтесь добиться, чтобы в ходе проектирования образовательный процесс обрел свою «нужность» и помог вам набраться того самого профессио-
нального опыта, которого так не хватает молодому специалисту, начинающему
свою карьеру.
5
Содержание курсового проекта
Цель работы заключается в освоении техники расчета силовой части элек-
тропривода, выбора электрооборудования, проверки корректности выбора и оп-
тимизации состава системы, разработки принципиальной и структурной схем, оп-
ределения параметров регуляторов и моделирования. В отчете по работе должны быть представлены:
1.техническое задание с исходными данными;
2.рабочая диаграмма с расчетом рабочего цикла для механизмов цикли-
ческого действия;
3.расчет моментов и мощностей механизма;
4.расчет и выбор редукторов;
5.расчет и выбор двигателей;
6.расчет и выбор преобразователя;
7.принципиальная схема;
8.расчет регуляторов и структурная схема системы управления;
9.исходные данные и результаты моделирования с диаграммами движения разомкнутой и замкнутой систем;
10.выводы по результатам проектирования.
Типы редукторов, двигателей, преобразователя и системы управления должны отвечать заданию. Варианты задания приведены в таблице. Исходными
данными для выбора редукторов служат требуемая мощность Pi или момент на
выходном валу M i , передаточное число i и скорость входного вала ωi . |
|
Исход- |
||||||||
ными данными для выбора двигателей являются требуемая мощность |
Pн или |
|||||||||
момент на валу M н , момент инерции J н и скорость ωн , а исходными данными |
||||||||||
для выбора преобразователя – его мощность Pп, ток |
Iп и напряжение U п. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Вари- |
Приводной |
Тип электро- |
Масса |
Ско- |
Радиус |
Ускоре- |
Ход |
Цикл |
|
Дру- |
рость |
шкива |
ние a, |
|
|||||||
ант |
механизм |
привода* |
m, кг |
v, м/с |
r, м |
м/с2 |
l , м |
T , с |
|
гое** |
1 |
Суппорт |
S-SM-TR-ϕ |
450 |
2,5 |
0,080 |
10 |
2 |
2,1 |
|
– |
2 |
S-AM-TR-ω |
200 |
2,2 |
0,120 |
8 |
2,5 |
3,3 |
|
– |
|
3 |
|
S-DM-TH-ϕ |
100 |
– |
0,090 |
6 |
3 |
4 |
|
2 |
4 |
Подъемник |
P-SM-TR-ϕ |
40 |
1,9 |
0,025 |
10 |
1 |
2,8 |
|
– |
5 |
P-AM-TR- ω |
40 |
– |
0,050 |
10 |
1 |
4 |
|
0,75 |
|
6 |
|
G-DM-TH-ϕ |
500 |
0,3 |
0,125 |
0,3 |
1 |
20 |
|
– |
7 |
Тележка |
W-SM-TR-ϕ |
3000 |
0,6 |
0,035 |
– |
– |
– |
|
0,15 |
8 |
W-AM-TR- ω |
2500 |
0,5 |
0,030 |
– |
– |
– |
|
0,13 |
|
9 |
|
W-DM-TH-ϕ |
2000 |
0,4 |
0,025 |
– |
– |
– |
|
0,11 |
10 |
Конвейер |
G-SM-TR-ϕ |
2500 |
0,7 |
0,150 |
0,4 |
– |
– |
|
0,12 |
11 |
G-AM-TR- ω |
2300 |
0,5 |
0,130 |
0,3 |
– |
– |
|
0,08 |
|
12 |
|
G-DM-TH-ϕ |
2100 |
0,3 |
0,110 |
0,2 |
– |
– |
|
0,05 |
13 |
Рольганг |
P-SM-TR-ϕ |
2400 |
0,9 |
0,020 |
0,2 |
– |
– |
|
0,03 |
14 |
|
P-AM-TR- ω |
2300 |
0,6 |
0,030 |
0,3 |
– |
– |
|
0,04 |

6
Вари- |
Приводной |
Тип электро- |
Масса |
Ско- |
Радиус |
Ускоре- |
Ход |
Цикл |
Дру- |
рость |
шкива |
ние a, |
|||||||
ант |
механизм |
привода* |
m, кг |
v, м/с |
r, м |
м/с2 |
l , м |
T , с |
гое** |
15 |
|
G-DM-TH-ϕ |
2200 |
0,4 |
0,040 |
0,4 |
– |
– |
0,05 |
16 |
Cтол |
P-SM-TR-ϕ |
300 |
– |
0,500 |
0,9 |
1,6 |
5,0 |
0,5 |
17 |
P-AM-TR- ω |
250 |
– |
0,400 |
0,7 |
1,5 |
4,5 |
0,7 |
|
18 |
|
P-DM-TH-ϕ |
200 |
– |
0,300 |
0,5 |
1,4 |
4,0 |
0,9 |
19 |
Тельфер |
G-SM-TR-ϕ |
100 |
0,2 |
0,100 |
– |
0,5 |
10 |
20 |
20 |
G-AM-TR- ω |
150 |
0,3 |
0,150 |
– |
0,8 |
8 |
25 |
|
21 |
|
G-DM-TH-ϕ |
200 |
0,4 |
0,200 |
– |
1,0 |
6 |
30 |
* G – зубчатый, P – планетарный, S – шариковинтовой, W – червячный редуктор; AM – асинхронный электропривод с векторным управлением, SM – сервопривод, DM – электропривод постоянного тока; TR – транзисторный, TH – тиристорный преобразователь; ϕ – система управления с контурами скорости и положения, ω
– с контурами тока и скорости.
** Другие данные: суппорт и подъемник – время движения t р (с), тележка – радиус колеса rк (м), конвейер – угол наклона ϕр (рад), рольганг – радиус валков rк (м), стол – радиус стола rк (м), тельфер – масса механизма m0 (кг).
v |
t |
T |
Суппорт
v |
t |
T |
Подъемник
Тележка Конвейер Рольганг
|
v |
|
|
v |
|
|
|
|
|
|
|
|
t |
t |
|
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
Стол |
|
|
|
Тельфер |
|
|
|
|
Рис. 1 |

7
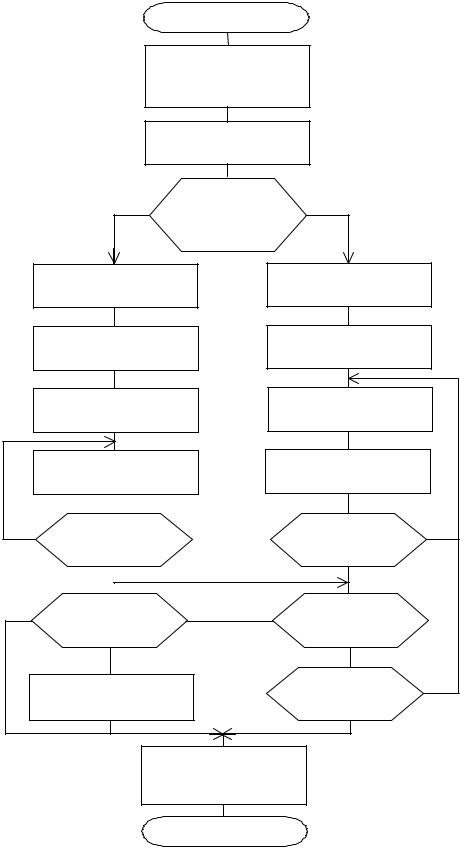
Регуляторы должны обеспечить оптимальные статические и динамические
характеристики. Схемы всех механизмов и рабочие диаграммы механизмов цик-
лического действия приведены на рис. 1. Примерный алгоритм проектирования
показан на рис. 2.
В расчетах можно принять:
γJ |
= |
10 – 20 |
допустимое соотношение масс; |
ηр |
= |
0,8 – 0,9 |
КПД приводного механизма; |
λM |
= |
2,5 – 5,5 |
перегрузочная способность двигателя; |
λI |
= |
1,2 – 1,7 |
перегрузочная способность преобразователя; |
g |
= |
9,81 м/с2 |
ускорение свободного падения; |
kз |
= |
1,2 – 1,5 |
коэффициент запаса. |
Ориентировочные значения КПД редукторов ηi и коэффициентов трения скольжения µ и качения µк приведены в Приложении.
Расчет рабочего цикла
Режимы работы механизмов бывают продолжительными и циклическими, которые, в свою очередь, подразделяются на повторно-кратковременные и перемежающиеся. Для продолжительных режимов оборудование выбирается с расчетом на полную нагрузку. Для циклических режимов задается период T, в течение которого скорость и нагрузка изменяются, и можно выбирать оборудование с за-
пасом по нагрузке. Расчет цикла выполняется по приведенным ниже формулам.
Ожидаемое время разгона или торможения tд = av определяется для элек-
троприводов, |
у которых наложены ограничения на скорость v и ускорение a . Ес- |
|||||||||
ли задано |
время движения |
t р , то |
вначале рассчитывается скорость |
|||||||
v = |
at р − (at |
р )2 − 4al |
= T . |
|
|
|
|
|
|
|
2 |
. У стола t р |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
at 2 |
||||
|
|
|
|
|
|
|
||||
|
Длина участков разгона и торможения |
lд |
= |
|
д |
. |
|
|||
|
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
||
|
Путь движения с постоянной скоростью lc |
= l − 2lд. |
||||||||
|
Время движения с постоянной скоростью |
tc = |
lс |
. |
||||||
|
|
|||||||||
|
Полное время движения t р |
= 2tд +tс . |
|
|
|
|
|
v |
||
|
|
|
|
|
|
|
|
|||
Время стоянки t0 = T −t р .
|
|
8 |
|
|
|
|
Начало |
|
|
|
|
Задание |
|
|
|
характеристик |
|
|
|
|
|
механизма |
|
|
|
|
Статический |
|
|
|
расчет механизма |
|
||
|
Да |
Ограничено |
Нет |
|
|
ускорение или |
|
|
|
|
время разгона? |
|
||
|
Динамический |
|
Выбор редукторов |
|
|
расчет механизма |
|
|
|
|
|
|
|
|
|
Выбор редукторов |
|
Приведение усилий |
|
|
|
к валу двигателя |
|
|
|
|
|
|
|
|
Приведение усилий |
|
Подбор двигателей к |
|
|
к валу двигателя |
|
редукторам |
|
|
Подбор двигателей |
|
Динамический |
|
|
к редукторам |
|
расчет механизма |
|
Нет |
Выполняются |
|
Выполняются |
Нет |
|
условия пуска? |
|
условия пуска? |
|
|
Да |
|
Да |
|
Нет |
Асинхронный |
Нет |
Циклический |
|
|
электропривод? |
|
режим? |
|
|
Да |
|
Да |
Нет |
|
Расчет допустимого |
|
Эквивалентная |
|
|
|
загрузка в норме? |
|
|
|
числа включений |
|
|
|
|
|
|
|
|
Да
Выбор
преобразователя и аппаратуры
Конец |
Рис. 2

9
Расчет приводных механизмов
Суппорт |
|
|
|
|
|||
Режим работы – циклический с движением и паузой. |
|
|
|
|
|||
Статическая мощность механизма P |
= |
mgµv |
. |
|
|
|
|
|
|
|
|
|
|||
с |
|
η |
|
|
|
|
|
|
|
р |
|
|
|
|
|
Подъемник |
|
|
|
|
|||
Режим работы – циклический с подъемом груза и паузой в нечетных циклах |
|||||||
и опусканием груза и паузой в четных циклах. |
|
|
|
|
|||
Статический момент механизма при подъеме груза M c′ |
= |
mgr |
. |
||||
|
|
||||||
|
|
|
|
|
η |
||
|
|
|
|
|
|
р |
|
Статический момент механизма при опускании груза M c′о |
= −mgrηр . |
||||||
Момент механизма при разгоне на подъем M д′1 = M с′ + |
mar |
. |
|||||
|
|||||||
|
|
|
|
η |
|||
|
|
|
|
|
р |
||
Момент механизма при торможении на подъем M д′2 = M с′ − marηр .
′ |
′ |
mar |
. |
|
|||
Момент механизма при разгоне на спуск M д1о = M со + |
η |
||
|
|
р |
|
|
′ |
′ |
|
Момент механизма при торможении на спуск M д2о = M со − marηр.
Тележка и рольганг
Режим работы – продолжительный.
Коэффициент трения µΣ = µк + µr . rк
Статическая мощность механизмаPс = mgµΣv .
ηр
Конвейер
ϕ
ϕ
тр1
тр2
Режим работы – продолжительный.
Сила сопротивления движению ленты вверх |
F |
= mg |
|
sin(ϕр +ϕтр1 ) |
|
||||
|
|
|
|
, |
где |
||||
|
|
|
|
||||||
|
|
с1 |
|
|
cos(ϕтр1 ) |
|
|
|
|
= arctan(µ1 ) – небольшой угол трения шкивов. |
|
|
|
|
|
|
|
||
|
|
sin(ϕтр2 −ϕ |
р ) |
|
|||||
Сила сопротивления сползанию груза вниз |
F |
= mg |
|
||||||
|
|
|
, |
где |
|||||
|
cos(ϕтр2 ) |
|
|||||||
|
|
с2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= arctan(µ2 ) – значительный угол трения груза о ленту конвейера. |
|
|
|
|
|||||
Статическая мощность механизма P |
= (Fc1 + Fc2 )v . |
|
|
|
|
|
|
||
c |
ηр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|