

Документы / ТЕМА 7. ОПОРНО-РУХОВА СИСТЕМА ЛЮДИНИ (конспект)
.doc<<ТЕМА ><7. ><ОПОРНО-РУХОВА ><СИСТЕМА ><ЛЮДИНИ>
<Опорно-руховий ><апарат ><людини ><складається ><з ><кісток, ><суглобів, ><зв'язок ><і ><м'язів. ><Рух ><здійснюється ><в ><місцях ><з'єднань ><кісток ><у ><суглобах. ><М'язи ><скорочуються ><і ><таким ><чином ><приводять ><у ><рух ><важелі ><кісток.>
<Кістки ><хребтового ><стовпа ><і ><нижніх ><кінцівок ><виконують ><опорну ><функцію, ><а ><кістки ><черепа, ><грудної ><клітки ><і ><хребтового ><стовпа ><виконують ><захисні ><функції. ><Маса ><скелета ><становить ><приблизно ><18 ><% ><у ><мужчин ><І ><16 ><% ><у ><жінок ><від ><загальної ><маси ><тіла. ><Скелет ><дорослої ><людини ><складається ><з ><206 ><кісток.>
>
<<7.1. ><Основи ><біомеханічної ><класифікації ><рухового ><апарату ><людини>
<Руховий ><апарат ><людини, ><з ><точки ><зору ><біомеханіки, ><це ><системи ><біокінематичних ><ланцюгів, ><всі ><біоланки ><якої ><об'єднані ><в ><біокінематичні ><пари ><і ><мають ><між ><собою ><зв'язки, ><які ><визначають ><їх ><зовнішню ><свободу ><рухів.>
Кістки скелета, наприклад, нижньої кінцівки з‘єднані між собою в єдину систему (кістки, суглобові хрящі і сумки, зв‘язки, м‘язи, судини і нерви) , яка з точки зору теорії механізмів і машин1 являється б і о к і н е м а т и ч н и м л а н -ц ю г о м, тобто сукупністю зв‘язаних між собою т в е р д и х т і л. Кожне із цих твердих тіл представляє собою л а н к у кінематичного ланцюга.
<Біокінематичний ><ланцюг ><– ><це ><зв'язані ><між ><собою ><біокінематичні ><пари ><з ><врахуванням ><їх ><природного ><розміщення ><в ><опорно-руховому ><апараті ><і ><ролі ><в ><організмі >людини. Д в і з в ‘я з а н і між собою л а н к и кінематичного ланцюга створюють б і о к і н е м а т и ч н у п а р у. Зв‘язок ланок здійснюється з допомогою спеціальних утворень - с у г л о б і в. Наприклад, колінний суглоб зв‘язує в кінематичну пару стегно і гомілку. Отже, б і о к і н е м а т и ч н а п а р а – це рухоме (кінематичне) з‘єднання двох кісткових ланок, в якому можливості рухів визначаються його будовою і керованою дією м‘язів.
Б і о к і н е м а т и ч н и й л а н ц ю г - це послідовне з’єднання ряду кінематичних пар. З‘єднання в кінематичному ланцюзі бувають або незамкнутими, або замкнутими. В незамкнутих ланцюгах є вільна кінцева ланка, що входить лиш в одну пару. Прикладом незамкнутого ланцюга є вільно висяча верхня кінцівка, в якій можливі ізольовані рухи у всіх суглобах руки (променево-зап‘ястковому, ліктьовому, плечовому).
<><Ланцюги ><бувають ><складними ><і ><простими, ><залежно ><від ><того, ><скільком ><кінематичним ><парам ><належать ><їх ><біоланки. ><В ><простому ><біокінематичному ><ланцюзі ><кожна ><ланка ><є ><елементом ><не ><більше ><двох ><бІокінематичних ><пар, ><складний ><ланцюг ><містить ><біоланки, ><які ><входять ><у ><три ><і ><більше ><біокінематичнІ ><пари.>
<Як ><прості, ><так ><і ><складні ><рухомі ><ланцюги ><можуть ><бути ><замкненими ><і ><незамкненими. ><Замкнені ><ланцюги ><- ><це ><такі, ><біоланки ><яких ><входять ><не ><менше ><ніж ><у ><дві ><біокінематичнІ ><пари. ><Незамкнені ><ланцюги ><містять ><біоланки, ><які ><входять ><лише ><в ><одну ><біокінематичну ><пару.>
<Назва ><біокінематичного ><ланцюга ><складається ><з ><абревіатури ><ВКС ><(bios, ><Kinesis, ><catena ><- ><біологічний ><рухомий ><ланцюг) ><і ><Індексу, ><що ><складається ><з ><латинської ><букви ><Р ><(pars ><- ><частина) ><і ><першої ><букви ><латинської ><назви ><частини ><тіла ><або ><скелета: ><голови, ><тулуба ><(хребтового ><стовпа, ><грудної ><клітки), ><пояса ><верхніх ><кінцівок ><(плечовий), ><вільних ><верхніх ><кінцівок, ><пояса ><нижніх ><кінцівок ><(таз) ><і ><нижніх ><кінцівок. ><Наприклад, ><біокінематичний ><ланцюг ><вільної ><верхньої ><кінцівки ><записують ><так: ><ВКС><рш><, ><де ><"ms" ><- ><membrum ><superius ><(верхня ><кінцівка).>
<Все ><тіло ><людини ><можна ><розглядати ><як ><єдиний ><кінематичний ><ланцюг: ><BKC><S><hs ><, ><де ><"shs" ><- ><soma ><(тіло) ><homo ><sapiens ><(людина ><розумна). ><Для ><позначення ><бІокінематичних ><пар ><в ><абревіатурі ><ВКС ><останню ><букву ><замінюють ><на ><"Р". ><Наприклад, ><для ><позначення ><однієї ><з ><пар ><хребтового ><стовпа ><позначення ><буде ><таким: ><ВКР^ю, ><де ><"cv" ><- ><columna ><vertebralis ><(хребтовий ><стовп), ><10 ><- ><номер ><пари, ><яку ><складають ><два ><хребці.>
<Біоланки ><голови. ><Скелет ><голови ><- ><череп ><- ><складається ><з ><багатьох ><кісткових ><утворень, ><але ><значні ><переміщення ><можливі ><тільки ><в ><скроне-><нижньощелеповому ><суглобі. ><Він ><утворює ><біокінематичну ><пару ><BKP><C><.><S>< ><,яка ><складається ><з ><мозкового ><і ><частини ><лицевого ><черепа ><(одна ><біоланка) ><і ><нижньої ><щелепи ><(друга ><біоланка).>
<Хребтовий ><стовп ><- ><це ><багато ><ланковий ><біокінематичний ><ланцюг ><(BKCcv), ><який ><складається ><з ><26 ><пар ><(зокрема ><BKP><cv><.j, ><що ><утворена ><ланкою ><черепа ><і ><першим ><шийним ><хребцем ><- ><атлантопотиличне ><з'єднання). ><Остання ><пара ><(cv-26) ><містить ><біоланки ><хрестця ><і ><копчика.>
<Крім ><цього, ><у ><загальному ><біокінематичному ><ланцюзі ><хребтового ><стовпа ><виділяють ><три ><автономно ><рухомі ><відділи ><- ><шийний ><(cvc\ ><грудний ><(cvt) ><І ><поперековий ><(cv!).>
<Грудна >< >< ><клітка >< ><складається >< ><з >< ><багатьох ><кісткових >< ><утворень >< ><складної>
<форми, >< ><які >< ><мають ><різні >< ><ступені >< ><вільності. >< ><Грудна ><клітка ><утворює >< ><єдиний ><біокінематичний ><ланцюг ><BKC,><h>< ><(ihoracalis ><- ><грудний). ><Грудні ><хребці ><належать>
<як ><до ><біокінематичного ><ланцюга ><хребтового ><стовпа, ><так ><і ><до ><біокінематичної ><ланки ><грудної ><клітки.>
>
<<Згідно ><із ><біомеханічною ><класифікацією, ><в ><біокІнематичному ><ланцюзі ><грудної ><клітки ><є ><40 ><основних ><біокІнематичних ><пар ><і ><4 ><додаткові. ><Кожне ><ребро ><при ><цьому ><утворює ><2 ><пари. ><Тому ><замість ><порядкових ><цифр ><номера ><пари ><в ><позначення ><додають ><букви ><"a" ><(anterior ><- ><передній) ><і ><п><р" ><(posterior ><- ><задній). ><Оскільки ><ребра ><є ><парними ><утвореннями, ><тому ><додатково ><введені ><позначення ><V ><(sinister ><- ><лівий) ><і ><"d" ><(dexter ><- ><правий). ><Отже, ><біокінематичні ><пари ><грудної ><клітки ><позначають ><відповідно ><th</><a><-\, ></Аф-1, ><th><sp><-\, ><th><sa><-\ ><тощо. ><Чотири ><додаткові ><біокінематичні ><пари ><позначають ><th><dp><-\ ><1, ><th><sp><-\ ><1, ><th><dp><-\2, ><ths><P><-12.>
<Пояс ><верхніх ><кінцівок ><(ВКС><СШ><) ><складається ><з ><чотирьох ><біокІнематичних ><пар, ><які ><рухомо ><з'єднують ><грудну ><кістку, ><ключиці ><і ><лопатки:>
<cms><s><-\ ><- ><ліва ><пара ><(грудна ><кістка ><і ><ліва ><ключиця)>
<cms><s><-2 ><- ><ліва ><пара ><(ліва ><ключиця ><і ><ліва ><лопатка)>
<cmsj-X ><- ><права ><пара ><(права ><ключиця ><і ><грудна ><кістка)>
<cmsj-2 ><- ><права ><пара ><(права ><ключиця ><і ><права ><лопатка).>
<Біокінематичні ><ланцюги ><правої ><і ><лівої ><верхніх ><кінцівок ><з'єднуються ><з ><ланцюгом ><пояса ><верхніх ><кінцівок ><своїми ><першими ><парами ><(ms><s><-l ><і ><msj-l). ><Праву ><і ><ліву ><другі ><пари ><становлять ><плечова ><і ><ліктьова ><кістки ><(ms><s><-2 ><і ><ms^-2 ><) ><Треті ><пари, ><утворені ><плечопроменевими ><кістками, ><з'єднані ><плечопроменевими ><суглобами. ><Четверті ><пари ><складаються ><з ><проксиміальних* ><кінців ><променевої ><і ><ліктьової ><кістки, ><які ><об'єднані ><у ><променеліктьові ><суглоби ><(ms><s><-4 ><і ><msj-4). ><П'яті ><пари ><mSs-S ><і ><msj-5 ><складені ><дистальними** ><кінцями ><ліктьової ><і ><променевої ><кісток ><у ><дистальному ><променеліктьовому ><суглобі.>
<Променезап'ястковий ><суглоб ><має ><3 ><пари ><(від ><ms-b ><до ><ms-S ><), ><кисть ><складається ><з ><34 ><пар ><(від ><ms-9 ><до ><ms-43).>
<В ><цілому ><одна ><верхня ><кінцівка ><має ><43 ><біокінематичні ><пари. ><При ><розгляді ><різноманітних ><рухів ><зручно ><розглядати ><біокінематичні ><ланцюги ><у ><відповідних ><варіантах.>
<♦Проксимальний ><(proximus) ><- ><ближній.>
<**Дистальний ><(distalis) ><- ><віддалений.>
<Біокінематичний ><ланцюг ><пояса ><нижніх ><кінцівок ><- ><тазу ><(ВКСр) ><складається ><з ><трьох ><пар:>
<перша ><пара ><(Р-\) ><- ><з'єднання ><лонних ><частин ><(правої ><і ><лівої) ><тазової ><кістки;>
<друга ><пара ><(Р-2) ><- ><хрестець ><- ><права ><клубова ><кістка;>
<третя ><пара ><(Р-3) ><- ><хрестець ><- ><ліва ><клубова ><кістка.>
<Біокінематичні ><ланцюги ><правої ><і ><лівої ><нижніх ><кінцівок ><(ВКС><т><^ ><з'єднані ><з ><ланцюгом ><пояса ><нижніх ><кінцівок ><своїми ><першими ><парами ><- ><mis-1 ><і ><mid-1.>
<Кістки ><стегна ><і ><гомілки ><утворюють ><5 ><біокІнематичних ><пар ><(від ><ті-2 ><до ><ті-><6), ><передплюсна ><і ><плюсна ><складається ><із ><21 ><пари ><(від ><ті-1 ><до ><ті-21), ><фаланги ><пальців ><стопи ><з'єднані ><за ><допомогою ><14 ><пар ><(від ><ті-28 ><до ><ті-41).>
<Всього ><нижня ><кінцівка ><має ><41 ><біокінематичну ><пару, ><які ><беруть ><участь ><у ><русі. ><Повний ><біокінематичний ><ланцюг ><людини ><нараховує ><(BKC><s><hs) ><246 ><пар.>
<Відносні ><рухи ><кожної ><ланки ><залежать ><від ><способу ><з'єднання ><і ><пластичного ><стану ><тканин, ><які ><беруть ><у ><ньому ><участь. ><Все ><це ><об'єднується ><поняттям ><"умови ><зв'язку" ><біоланок ><у ><кінематичних ><парах.>
>
<<Кількість ><умов ><зв'язку ><(s) ><обмежує ><рухомість ><кожної ><ланки ><в ><парі, ><яка ><теоретично ><не ><може ><бути ><меншою ><за ><1 ><і ><більшою, ><ніж ><5 ><(l<s<5). ><Практично ><біоланки ><рухового ><апарату ><людини ><відносно ><своєї ><пари ><мають ><від ><1 ><до ><З ><ступенів ><вільності. ><Щоб ><визначити ><кількість ><ступенів ><вільності ><(Я) ><у ><біокінематичній ><парі, ><від ><максимально ><можливих ><рухів ><в ><тривимірному ><просторі ><віднімають ><кількість ><умов ><зв'язку ><в ><парі ><(H=6-s).>
<Всього ><нижня ><кінцівка ><має ><41 ><біокінематичну ><пару, ><які ><беруть ><участь ><у ><русі. ><Повний ><біокінематичний ><ланцюг ><людини ><нараховує ><(BKC><s><hs) ><246 ><пар.>
<Відносні ><рухи ><кожної ><ланки ><залежать ><від ><способу ><з'єднання ><і ><пластичного ><стану ><тканин, ><які ><беруть ><у ><ньому ><участь. ><Все ><це ><об'єднується ><поняттям ><"умови ><зв'язку" ><біоланок ><у ><кінематичних ><парах. ><Кількість ><умов ><зв'язку ><(s) ><обмежує ><рухомість ><кожної ><ланки ><в ><парі, ><яка ><теоретично ><не ><може ><бути ><меншою ><за ><1 ><і ><більшою, ><ніж ><5 ><(/<,$<5). ><Практично ><біоланки ><рухового ><апарату ><людини ><відносно ><своєї ><пари ><мають ><від ><1 ><до ><3 ><ступенів ><вільності. ><Щоб ><визначити ><кількість ><ступенів ><вільності ><(Я) ><у ><біокінематичній ><парі, ><від ><максимально ><можливих ><рухів ><в ><тривимірному ><просторі ><віднімають ><кількість ><умов ><зв'язку ><в ><парі ><(H=6-s).>
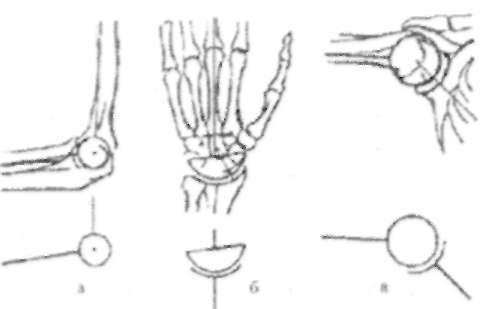
<Залежно ><від ><кількості ><умов ><зв'язку ><(рис.7.1) ><біопари ><поділяються ><на ><класи ><(IH,IV,V).>
< >
>
<Рис.7.1. ><Графічне ><зображення ><біокінематичних ><пар:а ><- ><V ><класу ><(ліктьовий ><суглоб); ><б ><- ><IV ><класу ><(суглоб ><кисті);в ><- ><III ><класу ><(плечовий ><суглоб).>
<Тоді ><рівняння ><для ><визначення ><Н ><будуть ><мати ><вигляд:>
<Н ><= ><6-s ><= ><6-3 ><= ><З ><- ><для ><біопар ><III ><класу;>
<Н ><= ><6-s ><= ><6-4 ><= ><2 ><- ><для ><біопар ><IV ><класу;>
<Н ><= ><6-s ><= ><6-5 ><= ><1 ><- ><для ><біопар ><V ><класу.>
<Для ><визначення ><кількості ><ступенів ><вільності ><біокінематичного ><ланцюга ><від ><максимально ><можливої ><величини ><ступеня ><вільності ><віднімається ><кількість ><умов ><зв'язку:>
<Н ><= ><6К-5В><5><-4В><4><- ><ЗВ><3>< ><(6.1)>
<де ><К ><- ><кількість ><біокінематичних ><пар ><у ><ланцюзі; ><В ><5 ><, ><В ><4 ><і ><В ><з ><- ><кількість ><біокінематичних ><пар ><п'ятого, ><четвертого ><і ><третього ><класу, ><відповідно.>
<При ><розрахунку ><кількості ><ступенів ><вільності ><біокінематичного ><ланцюга ><відносно ><нерухомої ><ланки ><вводиться ><ще ><одна ><характеристика ><- ><кількість ><ступенів ><рухомості ><(Р)>
<Р ><= ><Н-6>
>
<<Тоді ><розгорнута ><структурна ><формула ><біокінематичного ><ланцюга ><опорно-><рухового ><апарату ><людини ><буде ><мати ><вигляд:>
<Р ><= ><б(К-])-5В, ><-Щ ><-3Bj>
<Якщо ><прийняти, ><що ><(К-\) ><= ><п ><- ><кількість ><рухомих ><біоланок, ><то ><рівняння ><буде ><мати ><вигляд:>
<Р ><= ><6п-5В><5><-4В><4><-Щ>
<Будова ><опорно-рухового ><апарату ><людини ><і ><висока ><рухова ><активність ><привели ><до ><того, ><що ><вона ><навчилася ><"створювати" ><з ><своїх ><біокінематичних ><пар ><велику ><кількість ><локомоторних ><біомеханізмів, ><які ><необхідні ><для ><життєдіяльності, ><праці, ><спорту ><тощо.>
>
<<7.2. ><Закономірності ><антропометричної ><будови ><людини>
<З ><позиції ><біомеханіки ><не ><існує ><ідеально ><однакових ><людей, ><так ><само, ><як ><одна ><і ><та ><ж ><людина ><не ><робить ><двох ><однакових ><кроків. ><Однак ><є ><обов'язкові ><тенденції ><і ><закономірності, ><які ><відрізняють ><норму ><опорно-рухового ><апарату ><від ><патології.>
<Антропометрична ><норма ><визначає ><зв'язки ><між ><лінійними ><розмірами ><будь-якого ><сегмента ><тіла ><людини ><і ><його ><ростом. ><З ><цією ><метою ><вводиться ><величина ><"парс" ><(П), ><яка ><дорівнює ><1/56 ><росту ><людини. ><В ><парсах ><вимірюються ><довжини ><і ><поперечини ><всіх ><сегментів ><тіла ><(рис.7.2). ><Цими ><даними ><користуються ><для ><визначення ><довжин ><ампутованих ><кінцівок ><при ><протезуванні ><і ><ортезувані. ><Дані ><про ><величини ><мас ><сегментів ><тіла ><і ><центри ><їх ><розміщення ><зведені ><в ><табл.7.1.>
<Вони ><використовуються ><для ><моделювання ><опорно-рухової ><системи ><людини, ><моделювання ><механічних ><впливів ><на ><людський ><організм, ><а ><також ><розрахунку ><схем ><побудови ><і ><розподілу ><мас ><у ><протезах ><і ><ортезах.>
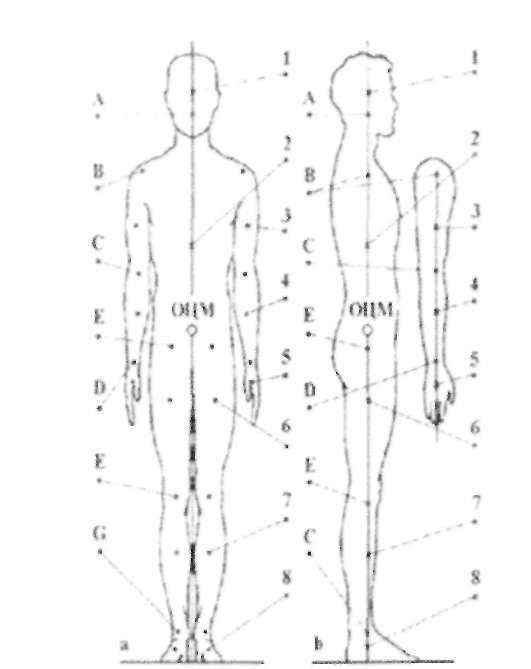
<На ><рис.7.3 ><і ><в ><табл.7.2 ><показані ><центри ><мас ><сегментів ><і ><їх ><координати, ><а ><також ><координати ><розміщення ><центрів ><суглобів ><людини. ><Знання ><антропометричних ><норм ><людини ><дуже ><важлива ><для ><побудови ><системи ><людина-><оператор-машина.>
<Таблиця ><7.1 ><Координати ><центрів ><мас ><(ріст ><людини ><100 ><%)>
|
<Сегмент> |
<Маса, ><% ><(Маса ><тіла ><100%)> |
<Коордр> |
<інати ><центрів ><мас, ><%> |
|
|
<X> |
<Y> |
<Z> |
||
|
<1> |
<2> |
<3> |
<4> |
<5> |
|
<Голова> |
<7,0> |
<0,00> |
<0,00> |
<93,48> |
|
<Шия ><і ><тулуб> |
<45,0> |
<0,00> |
<0,00> |
<71,09> |
|
<Голова, ><шия ><і ><тулуб> |
<52,0> |
<0,00> |
<0,00> |
<74,15> |
|
<Плече> |
<3,1> |
<0,00> |
<±10,66> |
<71,74> |
|
<Передпліччя> |
<2,0> |
<0,00> |
<±10,66> |
<55,33> |
|
<Кисть> |
<0,8> |
<0,00> |
<±10,66> |
<43,13> |
|
<Рука> |
<5,9> |
<0,00> |
<±10,66> |
<62,30> |
|
<Стегно> |
<11,6> |
<0,00> |
<±5,04> |
<42,48> |
|
<Гомілка> |
<4,8> |
<0,00> |
<±5,04> |
<18,19> |
|
<Стопа> |
<1,7> |
<3,85> |
<±6,76> |
<1,78> |
|
<Нога> |
<18,1> |
<0,35> |
<±5,16> |
<31,67> |
|
<Все ><тіло> |
<100,0> |
<0,00> |
<0,00> |
<57,65> |
>
<<
 >
>
< >
>
<Рис.7.3. ><Розміщення ><центрів ><суглобів ><і ><центрів ><мас ><у ><сегментах ><тіла ><людини.>
>
<<I>
<І>
>
<<Таблиця ><7.2 >< ><Координати ><центрів ><суглобів ><людини ><(ріст ><людини ><100 ><%)>
|
<Суглоб> |
<Позначення ><на ><рис.6.3> |
<Координати, ><%> |
||
|
<X> |
<У> |
<z> |
||
|
<Основа ><черепа ><біля ><1 ><хребця> |
<А> |
<0,00> |
<0,00> |
<91,23> |
|
<Плечовий> |
<В> |
<0,00> |
<±10,66> |
<81,16> |
|
<Ліктьовий> |
<С> |
<0,00> |
<±10,66> |
<62,20> |
|
<Променезап'ястковий> |
<D> |
<0,00> |
<±10,66> |
<46,21> |
|
<Тазостегновий> |
<Е> |
<0,00> |
<±5,04> |
<52,08> |
|
<Колінний> |
<F> |
<0,00> |
<±5,04> |
<28,44> |
|
<Гомілковий> |
<G> |
<0,00> |
<±5,04> |
<3,85 >< ><!> |
>
<<7.3. ><Біомеханічні ><особливості ><рухового ><апарату ><верхніх ><кінцівок>
<Верхня ><кінцівка ><складається ><з ><трьох ><сегментів: ><плеча, ><передпліччя ><і ><кисті. ><Верхня ><кінцівка ><відносно ><плечового ><пояса ><має ><суму ><ступенів ><вільності, ><яка ><дорівнює ><27; ><з ><них ><7 ><ступенів ><припадає ><на ><суглоби ><кисті. ><З ><точки ><зору ><біомеханіки ><верхня ><кінцівка ><є ><незамкненим ><біокінематичним ><ланцюгом ><з ><кінематичними ><парами, ><які ><мають ><1, ><2 ><і ><3 ><ступені ><вільності ><(табл.7.3).>