

2.Конструктивні особливості спеціальних інструментів
Основими комбінованими інструментами , тобто спеціальними інструментами для обробки отворів є всі нижче представлені інструменти, але нас найбільше цікавлять інструменти, що представлені на рис.1.4 і рис.1.5. Всі інші наведені для того, щоб показати різноманіття спеціальних інструментів, їх конструктивні особливості і функціональне призначення.
На малюнках зображено свердло ступінчате (рис.1.4), зенкер комбінований (рис.1.5).

Рис. 1.4 – Ступінчате свердло

Рис. 1.4 – Зенкер комбінований
3. Розрахункова схема та математична модель дослідної системи
3.1. Розрахункова схема гідросистеми чутливої до навантаження з електрогідравлічним управлінням
Для побудови математичної моделі системи управління та її аналізу складена розрахункова схема системи управління гідророзподільником з електрогідравлічним регулюванням, що зображена на рис. 3.1.
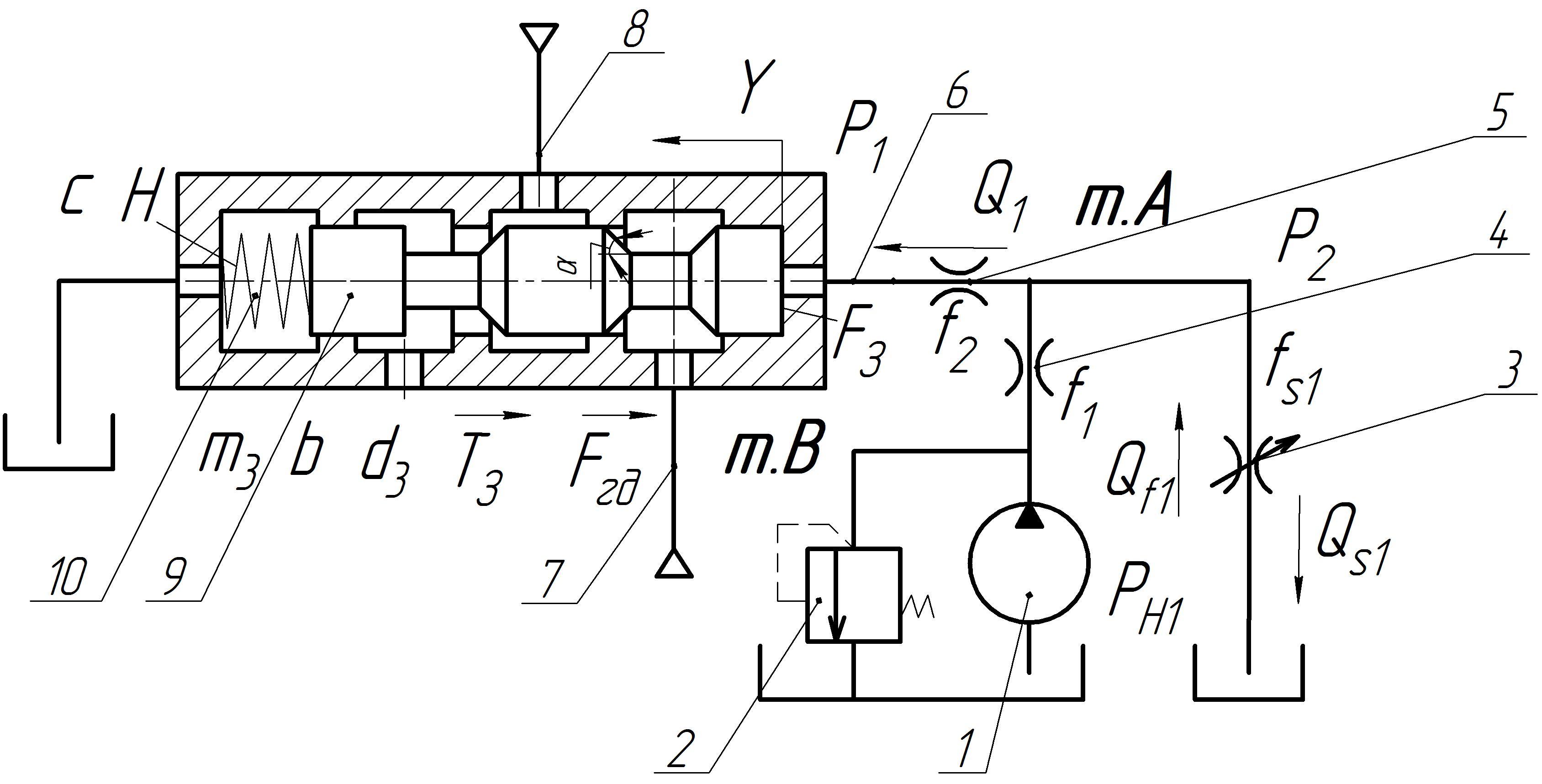
Рис. 3.1 – Розрахункова схема системи управління
Система
управління працює таким чином. В
нейтральному положенні золотника
пропорційного сервоклапана, який
зображений на схемі у вигляді регульованого
дроселя 3, потік
![]() ,
що проходить від насоса 1 через дросель
4 рухається до зливу не створюючи
достатньої сили для зрушення основного
золотника 9, що під дією пружини 10
знаходиться у крайньому правому
положенні. При закритті дроселя 3 (при
переміщенні золотника сервоклапана)
потік
,
що проходить від насоса 1 через дросель
4 рухається до зливу не створюючи
достатньої сили для зрушення основного
золотника 9, що під дією пружини 10
знаходиться у крайньому правому
положенні. При закритті дроселя 3 (при
переміщенні золотника сервоклапана)
потік![]() зменшується, а потік через дросель 5
зменшується, а потік через дросель 5![]() – збільшується. При цьому сила тиску
рідини
– збільшується. При цьому сила тиску
рідини![]() – перевищує золотник 9 вліво, який в
свою чергу з’єднує потік із лінії
нагнітання 7 з робочою лінією 8, що
дозволяє переміщувати робочий орган
розподільника.
– перевищує золотник 9 вліво, який в
свою чергу з’єднує потік із лінії
нагнітання 7 з робочою лінією 8, що
дозволяє переміщувати робочий орган
розподільника.
3.2 Математична модель гідросистеми чутливої до навантаження з електрогідравлічним управлінням
математична модель включає в себе рівняння потоків рідини в точках з кожного боку управління розподільчим золотником, рівняння сил діючих розподільчий золотник гідророзподільника, рівняння рівноваги золотника клапана. Згідно з розрахунковою схемою математична модель включає наступні рівняння.
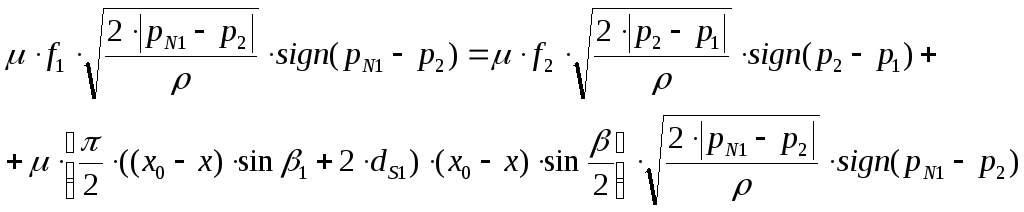
![]() (3.1)
(3.1)
![]()
Задамо початкові умови для розв’язання отриманих диференціальних рівнянь:
![]() =
15·105
Па, Р1
=
8·105
Па, Р2
= 6,5·105
Па, y=
0 м, x=
2·10-3
м.
=
15·105
Па, Р1
=
8·105
Па, Р2
= 6,5·105
Па, y=
0 м, x=
2·10-3
м.
Рівняння (2.10) разом з початковими умовами складають математичну модель розглядуваного блоку сервокерування розподільником. В результаті розв’язку рівнянь математичної моделі отримуємо залежності змінних стану від часу при відомих початкових умовах. Ці залежності змінних стану від часу дозволяють вивчити поведінку гідроприводу в динамічних режимах.
4. Комп’ютерне моделювання робочих процесів в системі
Оскільки математична модель включає в себе складні нелінійні диференціальні рівняння, то обробку математичної моделі виконаємо за допомогою програмного забезпечення МatLAB Simulink.
Simulink – інтерактивний інструмент для моделювання, імітації і аналізу динамічних систем. Він дає можливість будувати графічні блок-діаграми, імітувати динамічні системи, досліджувати працездатність систем і удосконалювати проекти. Програма Simulink є додатком до пакету MatLAB і повністю інтегрована з ним, забезпечуючи швидкий доступ до широкого спектру інструментів аналізу і проектування.
При моделюванні з використанням Simulink реалізується принцип візуального програмування, у відповідності з яким, користувач на екрані з бібліотеки стандартних блоків створює модель пристрою і здійснює розрахунки. При моделюванні користувач може вибирати метод розв’язання диференціальних рівнянь, а також спосіб зміни модельного часу (із фіксованим або перемінним кроком). В ході моделювання є можливість слідкувати за процесами, що проходять в системі. Для цього використовуються спеціальні пристрої спостереження, що входять до складу бібліотеки Simulink. Ці переваги роблять Simulink найбільш популярним інструментом для проектування систем керування і комунікації, цифрової обробки та інших додатків моделювання.