

Lecture Notes: Introduction to Finite Element Method |
Chapter 3. Two-Dimensional Problems |
Chapter 3. Two-Dimensional Problems
I. Review of the Basic Theory
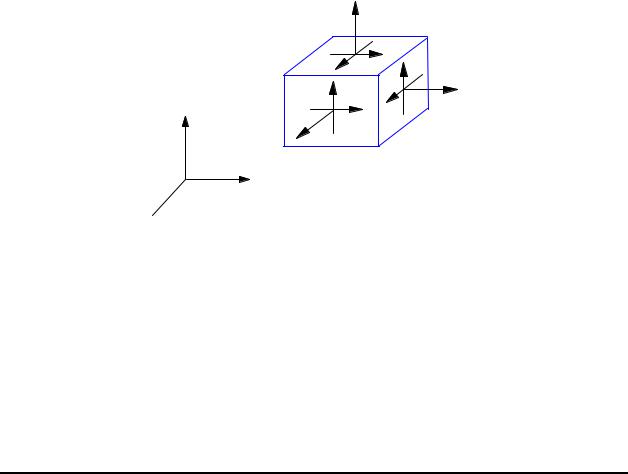
In general, the stresses and strains in a structure consist of six components:
σx , σy , σz , τxy , τyz , τzx |
for stresses, |
and
εx , εy , εz , γ xy , γ yz , γ zx |
for strains. |
σ y
|
τyz |
τ xy |
|
σx |
|
y |
|
τzx |
|
|
σz
x
 z
z
Under contain conditions, the state of stresses and strains can be simplified. A general 3-D structure analysis can, therefore, be reduced to a 2-D analysis.
© 1997-2002 Yijun Liu, University of Cincinnati |
75 |
Lecture Notes: Introduction to Finite Element Method |
Chapter 3. Two-Dimensional Problems |
Plane (2-D) Problems
• Plane stress:
σz =τyz =τzx = 0 (εz ≠ 0) (1)
A thin planar structure with constant thickness and loading within the plane of the structure (xy-plane).
y |
y |
 p
p
x z
• Plane strain:
εz =γ yz =γ zx = 0 (σz ≠ 0) (2)
A long structure with a uniform cross section and transverse loading along its length (z-direction).
y |
y |
 p
p
x z
© 1997-2002 Yijun Liu, University of Cincinnati |
76 |

Lecture Notes: Introduction to Finite Element Method |
Chapter 3. Two-Dimensional Problems |
Stress-Strain-Temperature (Constitutive) Relations
For elastic and isotropic materials, we have,
εx |
|
1/ E |
−ν / E |
0 |
σx |
|
|
|
εx0 |
|
|
|||
|
ε |
|
|
= −ν / E |
1/ E |
0 |
σ |
|
+ |
|
ε |
y0 |
|
(3) |
|
|
y |
|
|
|
y |
|
|
|
|
|
|||
γ |
|
|
0 |
0 |
1/ G τ |
|
|
γ |
xy0 |
|
|
|||
|
|
xy |
|
|
|
xy |
|
|
|
|
|
|||
or,
ε = E−1σ +ε0
where ε0 is the initial strain, E the Young’s modulus, ν the Poisson’s ratio and G the shear modulus. Note that,
G = |
E |
(4) |
|
2(1+ν) |
|||
|
|
which means that there are only two independent materials constants for homogeneous and isotropic materials.
We can also express stresses in terms of strains by solving the above equation,
σ |
|
|
|
|
|
1 ν |
0 |
|
|
ε |
|
|
ε |
|
|
|
||
x |
|
|
|
|
x |
x0 |
|
|
||||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
σy |
= |
|
|
ν 1 |
0 |
|
|
|
εy |
− |
εy0 |
|
(5) |
|||||
|
|
|
||||||||||||||||
|
|
|
|
1−ν2 |
|
|
|
|
|
|
|
|
|
|
|
|||
τ |
|
|
|
|
|
0 0 |
(1−ν) / 2 |
|
γ |
xy |
γ |
xy0 |
|
|
||||
xy |
|
|
|
|
|
|
|
|
|
|
|
|||||||
or,
σ = Eε +σ0
where σ0 = −Eε0 is the initial stress.
© 1997-2002 Yijun Liu, University of Cincinnati |
77 |

Lecture Notes: Introduction to Finite Element Method |
Chapter 3. Two-Dimensional Problems |
The above relations are valid for plane stress case. For plane strain case, we need to replace the material constants in the above equations in the following fashion,
|
|
|
|
E → |
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1−ν2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
ν → |
|
|
|
ν |
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
|
|
|
|
|
|
|
1 |
−ν |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
G → G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
For example, the stress is related to strain by |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
σ |
|
|
|
|
|
|
|
|
|
|
|
1 − ν |
ν |
0 |
|
|
ε |
|
|
|
ε |
|
|
||
x |
|
|
|
|
|
|
|
|
|
|
x |
|
x0 |
|
|||||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
σ |
|
= |
|
|
|
|
|
ν |
1 −ν |
0 |
|
|
ε |
|
− |
ε |
|
|
|||||||
y |
|
|
|
|
|
|
|
|
|
|
y |
|
y0 |
|
|||||||||||
|
|
(1 + ν)(1 − |
2ν) |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
τ |
|
|
|
|
|
|
|
|
|
|
|
0 |
(1 − 2ν) / 2 |
|
γ |
|
|
|
γ |
xy0 |
|
||||
xy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
|
|||||||
in the plane strain case.
Initial strains due to temperature change (thermal loading) is given by,
εεγ
x0
y0
xy0
|
α∆T |
|
||
|
|
|
|
(7) |
|
= α∆T |
|||
|
|
0 |
|
|
|
|
|
|
|
where α is the coefficient of thermal expansion, ∆T the change of temperature. Note that if the structure is free to deform under thermal loading, there will be no (elastic) stresses in the structure.
© 1997-2002 Yijun Liu, University of Cincinnati |
78 |