

3.5. График частот вращения
Для графического изображения кинематических связей приводов металлорежущих станков, а также для определения конкретных значений передаточных отношений всех передач привода и частот вращения всех его валов строят график частот вращения шпинделя. Построение графика начинают с создания структурной сетки. Сетка строится в соответствии с кинематической схемой привода станка и состоит из вертикальных и горизонтальных линий. Число вертикальных линий сетки должно равняться числу всех валов привода, включая вал электродвигателя. Горизонтальные линии проводят на расстоянии равном lgj . Число горизонтальных линий должно равняться числу частот вращения вала шпинделя. Горизонтальным линиям (снизу вверх) присваивают значения частот вращения вала шпинделя от n1 до nmax . График частоты вращения строится на структурной сетке с использованием лучей. Лучи, проведенные между вертикальными линиями, обозначают передачу между двумя валами привода с соответствующим передаточным отношением. Структурная сетка содержит следующие данные о приводе: количество групп передач; число передач в каждой из групп; передаточное отношение всех передач и всего привода при всех частотах вращения шпинделя; число возможных частот вращения всех валов при всех включениях передач; диапазон регулирования каждой группы передач, каждого вала и всего привода.
3.6. Порядок выполнения работы
6.1. Получить у преподавателя кинематическую схему станка.
6.2. Указать на схеме связь каждого элемента с валом (глухое соединение, подвижное, свободное) для привода главного движения.
6.3. Составить уравнение кинематического баланса привода главного движения в развернутом виде.
6.4. Определить число ступеней регулирования m привода главного движения.
6.5. Решить уравнение кинематического баланса привода главного движения.
6.6. Определить диапазон регулирования Rn, знаменатель ряда частот вращения j, относительную потерю скорости А для привода главного движения.
6.7. Построить график частот вращения.
6.8. Указать на схеме связь каждого элемента с валом (неподвижное соединение, подвижное, свободное) для привода подачи.
6.9. Определить значения максимальной и минимальной подач.
3.7. Пример выполнения работы
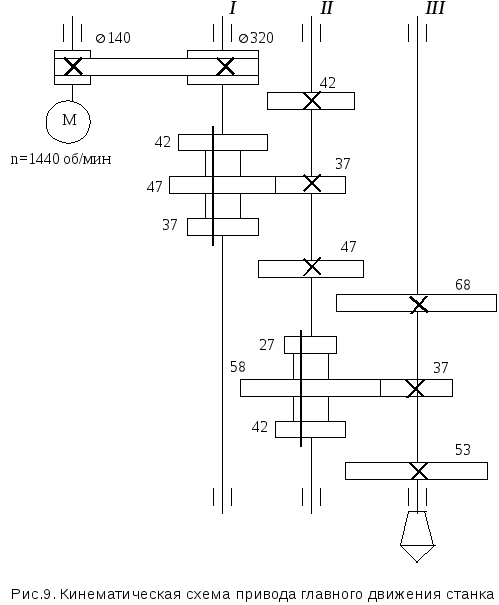
7.1. В качестве примера использован привод главного движения станка представленный на рис. 9 . Источником движения в данном приводе является электродвигатель с частотой вращения n=1440 об/мин. Вращение с вала электродвигателя на вал I привода осуществляется с помощью ременной передачи с диаметрами шкивов 140 мм (ведущий шкив) и 320 мм (ведомый шкив). На валу I находится блок из трех зубчатых колес с числом зубьев 42, 47, 37. С помощью этого блока зубчатых колес вращение передается на зубчатые колеса 42, 37, 47, находящиеся на валу II. Передача вращения с вала II на вал III также производится с помощью блока 27, 58, 42 и зубчатых колес 68, 37, 53.
7.2. На кинематической схеме привода показывается связь элементов с валами.
При обозначении связей элементов с валами учитываются следующие положения:
все показанные на схеме элементы должны быть задействованы в работе;
сумма зубьев вступающих в работу элементов двух соседних валов должна быть одинаковой (для зубчатых пар колес с одинаковым модулем);
должна быть исключена возможность одновременной передачи двумя способами между соседними валами.
|
|
7.3. Составляем уравнение кинематического баланса привода главного движения в развернутом виде
![]()

где
![]() -
частота вращения на шпинделе,
-
частота вращения на шпинделе,
![]() -
частота вращения электродвигателя, nЭД
=1440 об/мин,
-
частота вращения электродвигателя, nЭД
=1440 об/мин,
![]() -
передаточное отношение ременной
передачи,
-
передаточное отношение ременной
передачи,
![]() ,
,
![]() -
передаточное отношение с I
вала на II
вал ,
-
передаточное отношение с I
вала на II
вал ,
![]() ,
,
![]() -
передаточное отношение с II
вала на III
вал,
-
передаточное отношение с II
вала на III
вал,
![]()
7.4. Определяем число ступеней регулирования m привода главного движения. Число ступеней регулирования определяется произведением числа групп передач. На данной схеме передача вращения реализуется следующим образом:
передача с вала электродвигателя на первый вал привода осуществляется одним способом – с помощью ременной передачи;
передача с первого вала на второй может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 42, 47, 37;
передача со второго вала на третий может быть осуществлена тремя способами – с помощью подвижного блока зубчатых колес с числами зубьев 27, 58, 42.
Таким образом, число ступеней регулирования определяется
![]() .
.
7.5. Решаем уравнение кинематического баланса привода главного движения с помощью табличного способа. Решение представлено табл. 3.
Таблица 3
Табличный способ решения уравнения кинематического баланса
|
|
|
|
|
|
|
|
|
1440 |
|
617 |
|
784 |
|
1229 |
|
|
621 | |||||
|
|
311 | |||||
|
|
617 |
|
967 | |||
|
|
489 | |||||
|
|
245 | |||||
|
|
485 |
|
760 | |||
|
|
384 | |||||
|
|
193 |
Решение уравнения кинематического баланса привода главного движения позволяет определить следующие значения частот вращения вала шпинделя: 193, 245, 311, 384, 489, 621, 760, 967, 1229.
7.6. Определяем диапазон регулирования Rn, знаменатель ряда частот вращения j, относительную потерю скорости А для привода главного движения.
![]()
![]()
![]()
7.7. Строим график частот вращения.
П остроение
графика начинаем с создания структурной
сетки. Число вертикальных линий сетки
равняется четырем (три вала привода
плюс вал электродвигателя). Число
горизонтальных линий должно равняться
числу частот вращения вала шпинделя,
те есть девяти. В рассматриваемом примере
частота вращения электродвигателя
(1440 об/мин) больше максимального значения
частоты вращения вала шпинделя (1229
об/мин). Поэтому при создании сетки
дополнительно добавляем одну горизонтальную
линию. Лучи проводятся в соответствие
с решением уравнения кинематического
баланса (табл.3).
остроение
графика начинаем с создания структурной
сетки. Число вертикальных линий сетки
равняется четырем (три вала привода
плюс вал электродвигателя). Число
горизонтальных линий должно равняться
числу частот вращения вала шпинделя,
те есть девяти. В рассматриваемом примере
частота вращения электродвигателя
(1440 об/мин) больше максимального значения
частоты вращения вала шпинделя (1229
об/мин). Поэтому при создании сетки
дополнительно добавляем одну горизонтальную
линию. Лучи проводятся в соответствие
с решением уравнения кинематического
баланса (табл.3).
7.8. На схеме привода подачи показывается связь каждого элемента с валом (неподвижное соединение, подвижное, свободное). Условные обозначения на приводе показываются с учетом требований пункта 7.2.
7.9. Определяем значения максимальной и минимальной подач.
Для приводов подач токарных и фрезерных станков, имеющих в качестве источника вращения отдельный электродвигатель (независимый привод подачи), значения подач определяются из выражения
![]() ,
мм/об,
,
мм/об,
где,
![]() -
частота вращения электродвигателя
привода подач, об/мин,
-
частота вращения электродвигателя
привода подач, об/мин,
![]() -
передаточное отношение кинематической
цепи привода подач,
-
передаточное отношение кинематической
цепи привода подач,
![]() -
шаг винтовой передачи, мм.
-
шаг винтовой передачи, мм.
Для приводов станков у которых цепь движения подачи начинается с вала шпинделя значения подач определяются по формуле
![]() ,
мм/об.
,
мм/об.
В данном случае в качестве источника вращения выступает вал шпинделя и в формуле указывается 1 оборот вала шпинделя.