

1.4. Третий канал возмущения
Так как передаточная функция объекта по третьему каналу возмущения аналогична по структуре передаточной функции Wоб0(p), то мы можем воспользоваться формулами, которые были выведены в пункте 1.1 первого этапа части первой.
Построения переходной функции
![]()
Воспользуемся формулой (1.1). Подставим в нее значения для объекта по третьему каналу возмущения.
![]() (1.23)
(1.23)
При t < t h(t) = 0.
Таблица 1.13 - Расчетные данные для построения переходного процесса
|
t |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
|
hв3(t) |
0 |
0,39 |
1,496 |
3,196 |
5,4 |
8,038 |
11,04 |
14,34 |
17,91 |
25,67 |
29,8 |
|
t |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
190 |
200 |
|
hв3(t) |
34,06 |
38,43 |
42,91 |
47,46 |
52,1 |
56,76 |
61,5 |
66,26 |
71,07 |

Рис. 1.13 Переходная функция объекта по третьему каналу возмущения
Построение амплитудно – частотной характеристики
![]()
![]() (1.24)
(1.24)
Таблица 1.14 - Расчетные данные для построения АЧХ
|
ω |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
|
Ав3(ω) |
∞ |
0,5 |
0,125 |
0,055 |
0,031 |
0,2 |
0,014 |
0,01 |
7,8·10-3 |
|
ω |
0,9 |
1,0 |
1,2 |
1,4 |
1,6 |
1,8 |
2,0 |
∞ |
|
Ав3(ω) |
6,2·10-3 |
5,0·10-3 |
3,47·10-3 |
2,5·10-3 |
1,95·10-3 |
1,54·10-3 |
1,25·10-3 |
0 |
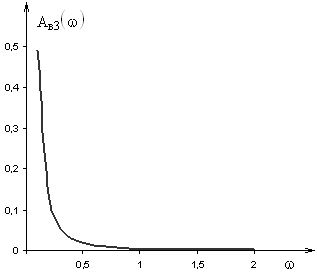
Рис. 1.14 АЧХ объекта по третьему каналу возмущения
Построение фазо – частотной характеристики
![]()
![]() (1.25)Таблица
1.15 - Расчетные
данные для построения ФЧХ
(1.25)Таблица
1.15 - Расчетные
данные для построения ФЧХ
|
ω |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
φв3(ω) |
-π/2 |
-2,976 |
-3,058 |
-3,086 |
-3,1 |
-3,11 |
-3,114 |
-3,118 |
-3,121 |
-3,123 |
|
ω |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,6 |
1,8 |
2,0 |
∞ |
|
φв3(ω) |
-3,125 |
-3,126 |
-3,128 |
-3,129 |
-3,13 |
-3,131 |
-3,132 |
-3,133 |
-π |

Рис. 1.15 ФЧХ объекта по третьему каналу возмущения
Построение амплитудно – фазной характеристики

 (1.26)
(1.26)
![]()
![]() (1.27)
(1.27)
![]()
Таблица 1.16 - Расчетные данные для построения АФХ
|
ω |
0 |
0,6 |
0,11 |
0,16 |
0,21 |
0,26 |
0,37 |
0,36 |
0,41 |
|
Reв3(ω) |
∞ |
-1,31 |
-0,41 |
-0,2 |
-0,115 |
-0,075 |
-0,05 |
-0,039 |
-0,03 |
|
Imв3(ω) |
∞ |
-0,04 |
-0,06 |
-0,02 |
-0,0092 |
-0,005 |
-0,003 |
-0,0018 |
-0,0012 |
Продолжение таблицы 1.16
|
ω |
0,46 |
0,51 |
0,55 |
0,6 |
0,65 |
0,75 |
∞ |
|
Reв3(ω) |
-0,024 |
-0,02 |
-0,016 |
-0,014 |
-0,012 |
-0,01 |
0 |
|
Imв3(ω) |
-8,8·10-4 |
-6,4·10-4 |
-4,8·10-4 |
-3,8·10-4 |
-3·10-4 |
-2,4·10-4 |
0 |

Рис. 1.16 АФХ объекта по третьему каналу возмущения
Этап 2. Синтез замкнутой САУ с ПИ – регулятором на заданную степень колебательности m =0,221
2.1. Построение расширенных частотных характеристик объекта по каналу регулирования
Построение амплитудно – частотной характеристики
![]()
Заменим р = -mω+jω
в выражении передаточной функции ![]() и получим следующее выражение:
и получим следующее выражение:
![]()
![]()
![]() (1.28)
(1.28)
Находим выражение для АЧХ по каналу регулирования.
 (1.29)
(1.29)
![]()
Таблица 1.17 - Расчетные данные для построения РАЧХ и АЧХ
|
ω |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
Аоб(ω) |
∞ |
1,857 |
0,49 |
0,22 |
0,124 |
0,08 |
0,055 |
0,041 |
0,031 |
0,025 |
0,02 |
|
Аоб(m,ω) |
∞ |
2,398 |
0,76 |
0,42 |
0,293 |
0,23 |
0,202 |
0,185 |
0,176 |
0,174 |
0,175 |
|
ω |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
1,9 |
2,0 |
|
Аоб(ω) |
0,014 |
0,012 |
0,01 |
8,9·10-3 |
7,8·10-3 |
6,92·10-3 |
6,2·10-3 |
5,54·10-3 |
5,0·10-3 |
|
Аоб(m,ω) |
0,189 |
0,201 |
0,22 |
0,234 |
0,257 |
0,284 |
0,316 |
0,353 |
0,398 |

Рис. 1.17 АЧХ и РАЧХ объекта по каналу регулирования
Построение фазо – частотной характеристики
Находим выражение для ФЧХ по каналу регулирования.
![]() (1.30)
(1.30)
При w
=
![]() =
=![]() =
0,181
=
0,181 ![]() и
и
![]()
Следовательно, при w ≤ 0,181
![]() (1.31)
(1.31)
![]() ,
,
а при w > 0,181
![]() (1.32)
(1.32)
![]() .
.
Таблица 1.18 - Расчетные данные для построения РФЧХ и ФЧХ
|
ω |
0 |
0,005 |
0,01 |
0,015 |
0,02 |
0,025 |
0,03 |
0,035 |
0,04 |
0,05 |
|
φоб(ω) |
-1,57 |
-1,745 |
-1,92 |
-2,08 |
-2,23 |
-2,38 |
-2,51 |
-2,64 |
-2,76 |
-2,9 |
|
φоб(m,ω) |
-1,18 |
-1,97 |
-2,147 |
-2,33 |
-2,5 |
-2,67 |
-2,82 |
-2,96 |
-3,09 |
-3,3 |
|
ω |
0,06 |
0,07 |
0,09 |
0,1 |
0,15 |
0,16 |
0,17 |
0,18 |
0,19 |
0,2 |
|
φоб(ω) |
-3,15 |
-3,32 |
-3,62 |
-3,76 |
-4,38 |
-4,5 |
-4,61 |
-4,72 |
-4,83 |
-4,9 |
|
φоб(m,ω) |
-3,54 |
-3,72 |
-4,04 |
-4,18 |
-4,81 |
-4,93 |
-5,05 |
-5,16 |
-5,27 |
-5,38 |

Рис. 1.18 РФЧХ и ФЧХ объекта по каналу регулирования
2.2. Построение кривой равной (заданной) степени колебательности (m =0,221)
Передаточная
функция ПИ – регулятора:
![]()
Заменим р = -m·ω + j ω и выделим действительную и мнимую части:
![]()
![]() (1.33)
(1.33)
![]() (1.34)
(1.34)
Передаточная
функция объекта по каналу регулирования:
![]()
Выделим действительную и мнимую части;
![]()
![]()
Для того чтобы САУ имела заданную степень колебательности m=0,221 необходимо, чтобы АФХ разомкнутой САУ проходила через точку (-1, j0), то есть:
 (1.35)
(1.35)
Передаточная
функция разомкнутой системы имеет вид:
![]()
 В
этой системе три неизвестных: s0,
s1,
ω, – поэтому решая систему считаем, что
ω – это параметр, и таким образом находим
s0
и s1.
В
этой системе три неизвестных: s0,
s1,
ω, – поэтому решая систему считаем, что
ω – это параметр, и таким образом находим
s0
и s1.

![]()
![]()

![]()
![]()
![]() (1.36)
(1.36)
Преобразуем второе выражение в системе (1.35), затем подставим найденное s0 в преобразованное выражение и найдем s1:

![]()
![]()
![]() (1.37)
(1.37)
Таблица 1.19 - Расчетные данные для построения кривой равной (заданной) степени колебательности (m =0,221)
|
ω |
0 |
0,001 |
0,002 |
0,003 |
0,004 |
0,005 |
0,006 |
0,007 |
|
s0 |
0 |
2,06·10-6 |
8,12·10-6 |
1,8·10-5 |
3,13·10-6 |
4,8·10-5 |
6,78·10-5 |
9,041·10-5 |
|
s1 |
0 |
9,43·10-4 |
2·10-3 |
3,18·10-3 |
4,46·10-3 |
5,85·10-3 |
7,34·10-3 |
8,94·10-3 |
|
ω |
0,008 |
0,009 |
0,01 |
0,015 |
0,02 |
0,025 |
0,026 |
0,027 |
|
s0 |
1,16·10-4 |
1,72·10-4 |
3,37·10-4 |
5,02·10-4 |
5,02·10-4 |
6,2·10-4 |
6,33·10-4 |
6,43·10-4 |
|
s1 |
0,011 |
0,012 |
0,014 |
0,025 |
0,037 |
0,051 |
0,054 |
0,057 |
|
ω |
0,028 |
0,029 |
0,03 |
0,035 |
0,04 |
0,042 |
|
s0 |
6,47·10-4 |
6,47·10-4 |
6,41·10-4 |
5,11·10-4 |
1,77·10-4 |
-2,71·10-5 |
|
s1 |
0,06 |
0,063 |
0,066 |
0,081 |
0,096 |
0,102 |

Рис. 1.19 Кривая равной степени колебательности (m =0,221)
Так как объект по каналу регулирования является астатическим, то кривая равной степени колебательности выходит из начало координат.
Выбор оптимальных настроек ПИ – регулятора
Для определения оптимальных настроек ПИ-регулятора, обеспечивающих при заданной степени колебательности m=0,221 минимизацию квадратичной интегральной оценки I2 переходного процесса в замкнутой системе, необходимо найти точку с оптимальными настройками значение частоты опт составляет примерно 1,3м, где м – значение частоты в точке максимума кривой S0-S1 (рис. 1.19):
м=0,028
опт1,3м=1,30,028=0,0364
Оптимальные настройки: S0опт=5,283·10-4,
S1опт=0,08.
Этап 3. Анализ замкнутой САУ с оптимальными настройками ПИ – регулятора