

2 Определение геометрических размеров захватного устройства

Рисунок 8 – Кинематическая схема для расчетов
На
основании принципа возможных перемещений
 ,
где
,
где
 -
элементарная работа силы Fiна
возможном перемещении точки её положения.
-
элементарная работа силы Fiна
возможном перемещении точки её положения.


Обозначим как Pnпроекцию силы P на нормаль к кулачку, 𝛿n- элементарное перемещение т. В, на котором Pnсовершает работу. Учтем, что механизм симметричный, тогда

 -
силовое передаточное отношение;
-
силовое передаточное отношение;
Так как точки В и С движутся по дуге окружности, то 𝛿Sl, 𝛿S2 - элементарные перемещения точек В и С. Обозначим как L1 отрезок АВ, как L2 отрезок АС.


 -
силовое передаточное отношение;
-
силовое передаточное отношение;
 -
кинематическое передаточное отношение;
-
кинематическое передаточное отношение;
 -
сила захватывания.
-
сила захватывания.
3 Определение основных размеров звеньев механизма
Для нахождения основных размеров звеньев определим максимальное и минимальное раскрытие губок захватного устройства.

 ;
;

Рисунок 9 – Схема для определения основных размеров звеньев механизма.
На рисунке 9 представлена схема для определения основных размеров звеньев механизма. Точка В совершает вращательное движение вокруг точки А и при перемещении поршня на расстояние Р (ход поршня) переходит в точкуВ'. С другой стороны точка В перемещается вдоль клина, совершая поступательное движение вверх на ВН' и влево на В 'Н'.
ВН'=P·tgα, где α – угол клина, равный 4°…8°;
Треугольники
АВВ' и АСС' подобны, поэтому
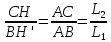 ;
;
CH=Smax– Smin=25 мм;
 ;
;
-
Примем L2=1,25L1, тогда

-
L2=2L1, тогда

-
L2=3L1, тогда

-
L2=4L1, тогда

Для каждого полученного значения хода поршня выбираем пневмоцилиндр. Подставляя соотношение длин плеч и номинальную силу пневмоцилиндра в формулу передаточного отношения выбираем тот вариант, которым обеспечивается необходимая F3. Выбираем третий вариант и пневмоцилиндр с номинальной силой 176H (ГОСТ 26059-89).
4 Выбор двигателя
В относительном движении соприкасающихся элементов кинематических пар, при наличии притормаживающих их сил, между этими элементами возникает трение, на преодоление которого затрачивается работа двигателя, приводящего в движение механизм. Трение между элементами кинематических пар изменяет величину и положение реакций тих пар.
 ,
где Nдв
– мощность привода к захвату; Nтр
– потери на трение в кинематической
парах.
,
где Nдв
– мощность привода к захвату; Nтр
– потери на трение в кинематической
парах.

Потери
на трение в кулачке можно не учитывать,
так как

Потери
на трение во вращательной паре определяется
по формуле ,
где
,
где – коэффициент
трения скольжения во вращательной паре,
R
– нормальная составляющая реакции,
– коэффициент
трения скольжения во вращательной паре,
R
– нормальная составляющая реакции,
 – угловая скорость одного звена по
отношению к другому.
– угловая скорость одного звена по
отношению к другому.

Рисунок 10 – Схема для определения угловых и линейных скоростей.
На рисунке 10 представлена схема для определения угловых и линейных скоростей элементов захватного устройства.




 – скорость
точки В;
– скорость
точки В;
 – Угловая
скорость звена ВС;
– Угловая
скорость звена ВС;
 -
сила реакции опоры колеса;
-
сила реакции опоры колеса;
 –
реакция
во вращательной паре
–
реакция
во вращательной паре
 – потери на трение во вращательной паре
– потери на трение во вращательной паре
 - КПД
схвата.
- КПД
схвата.
5.Расчет на прочность элементов захватного устройства
Проверка на прочность рычага. На рисунке 10 приведены эпюры действующих сил и изгибающих моментов.







На рисунок 10 – эпюры действующих сил и изгибающих моментов
Опасное сечение находится там, где располагается концентратор напряжений – отверстие под вращательную кинематическую пару. Рассматриваемая деталь (рычаг) испытывает растяжение и изгиб.
Условие
прочности при растяжении :

Условие
прочности при изгибе :

Материал
рычага сталь 45 с термообработкой. Предел
текучести
 ,
коэффициент запаса прочности nm=5.
Также важным требованием является
обработка рычага до твердости HRC=
49…52. Клин необходимо обрабатывать
цементацией до HRC =58…62.
,
коэффициент запаса прочности nm=5.
Также важным требованием является
обработка рычага до твердости HRC=
49…52. Клин необходимо обрабатывать
цементацией до HRC =58…62.

Wx=

Условие прочности в опасном сечении выполняется.
Проверка на смятие резьбы, соединяющей клин и шток пневмоцилиндра.
 см=0,8*
см=0,8* т=144МПа;
т=144МПа;

Вывод
В ходе лабораторной работы произведен расчет захватного устройства для промышленного робота. Это связано с большим разнообразием захватных устройств промышленных манипуляторов, и часто даже при использовании стандартных промышленных манипуляторов. в зависимости от объекта манипулирования приходится разрабатывать специальные захватные устройства.