Федеральное агентство по образованию
Пензенская государственная технологическая академия
Кафедра «Автоматизации и управления»
Дисциплина «Основы теории управления»
Лабораторная работа № 2
«Моделирование САУ в нормальной форме
в пространстве состояний»
Выполнил: студент 3 курса гр. 09Д
Горбунов Р.С.
Проверил: д.т.н., профессор
Прошин И.А.
Пенза 2012
ИСХОДНЫЕ ДАННЫЕ
Порядок системы n:=3
Порядок полинома входного воздействия m:=0
Параметры полинома входного воздействия
b0 := 50
Параметры характеристического полинома
аЗ := 3 а2 := 24 а1 := 51 а0 := 30
Передаточная функция системы по второму входу
![]()
Полюса передаточной функции системы
s1 := -1 s2 := -2 s3 := -5
-
РАСЧЕТ ПАРАМЕТРОВ МОДЕЛИ СИСТЕМЫ В НОРМАЛЬНОЙ ФОРМЕ
-
Параметры передаточной функции в канонической форме
-
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-
Параметры матрицы управления
![]()
![]()
1.3 ММ в нормальной форме пространства состояний НФПС первой модификации
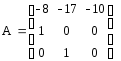
Матрицы системы управления и наблюдения
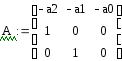

![]()

-
РАСЧЁТ ПЕРЕХОДНОЙ ФУНКЦИИ
2.1 Входное воздействие и начальное условие
![]()

2.2 Уравнение состояния
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2.3 Уравнение выхода
![]()
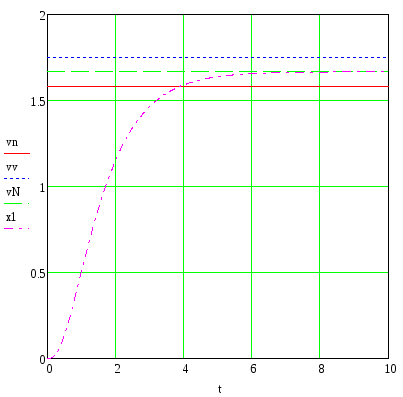
2.4 Линии пятипроцентного отклонения
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
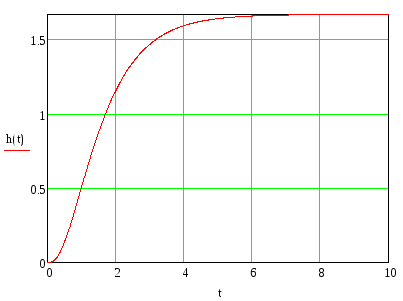
2.5 Переходная характеристика выходной координаты
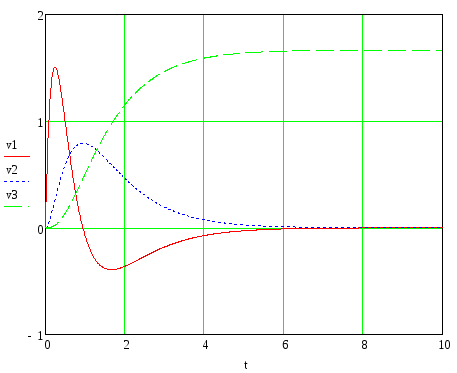
2.6 Переходные характеристики координат состояния
-
Аналитичесий расчёт переходной функции
Коэффициенты разложения передаточной функции на сумму простых дробей
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Аналитическое выражение для переходной функции
![]()
-
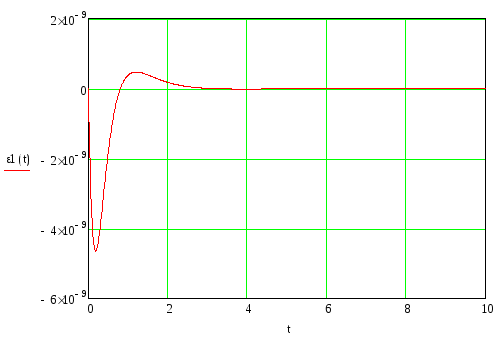
Разность между переходными характеристиками, вычисленными численно и аналитически
![]()