

15.3. Исключение сравнений по глубине. Оболочки
В некоторых алгоритмах, чтобы избежать ненужных сравнений между объектами, используются экранные оболочки, введенные в гл. 4 для исключения лишних отсечений. На рис. 15.3 показаны два трехмерных многоугольника, их проекции, а также прямоугольные оболочки, окружающие проекции. Оболочки в этом случае не пересекаются и, следовательно, не надо проверять, не перекрываются ли ребра одного многоугольника с ребрами другого.


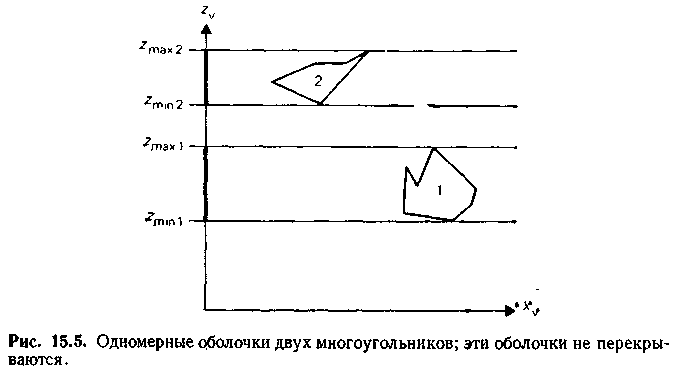
чтобы выяснить, например, перекрываются ли два многоугольника в направлении z. На рис. 15.5 показано, как в таком случае используются оболочки; здесь оболочкой является бесконечная область, ^ограниченная минимальным и максимальным значениями г для каждого многоугольника. Перекрытие по оси z отсутствует, если
![]()
Во всех этих случаях наиболее сложным является нахождение самих оболочек. Их можно определить, просматривая снова список вершин координат и фиксируя наибольшие и наименьшие значения по каждой координате.
Предположим, что многоугольники были подвергнуты преобразованию, описываемому матрицей М (разд. 15.2). Тогда проецирование на плоскость ху выполняется тривиально путем установки z=0 для каждой вершины. Если бы это преобразование не применялось, для построения проекции потребовалось бы деление на г.
Если прямоугольные оболочки перекрываются, имеет место один из двух случаев (показанных на рис. 15.4): либо проекции многоугольников также перекрываются (случай а), либо этого не происходит (случай б). В обоих случаях для более подробного анализа требуются дополнительные сравнения. В случае б с их помощью будет установлено, что на самом деле два многоугольника не перекрываются: пересечение оболочек в некотором смысле оказалось «ложной тревогой».
Можно воспользоваться оболочками, как в гл. 9, для окружения самих многоугольников, а не их проекций — в этом случае оболочки становятся пространственными. С другой стороны, их можно применить для указания границ в пределах одного измерения,
15.4. Алгоритм сортировки по глубине
В этом алгоритме, разработанном Ньюэлом, Ньюэлом и Санча [341], применяется простой подход, состоящий из трех шагов:
1. Упорядочение всех многоугольников в соответствии с их наибольшими z-координатами.
2. Разрешение всех неопределенностей, которые возникают при перекрытии z-оболочек.
3. Преобразование каждого из многоугольников в растровую форму, производимое в порядке уменьшения их наибольшей г-координаты.
Основная идея алгоритма заключается в упорядочении многоугольников в соответствии с их удаленностью от точки зрения, а также в размещении этих многоугольников в буфере регенерации в порядке убывания расстояния. Ближайшие многоугольники преобразуются в растровую форму последними и закрывают более отдаленные многоугольники, поскольку записываются в буфер регенерации поверх старых. При разложении каждого многоугольника в растр значения его пэлов вычисляются с использованием одного из правил тоновой или цветовой закраски, изложенных в гл. 16. Рассматриваемый алгоритм обладает свойствами алгоритмов, работающих в пространстве изображения и в пространстве объекта: некоторые его шаги выполняются в первом пространстве, а некоторые — во втором.
Этот алгоритм может легко работать с явным приоритетом, рассмотренным в разд. 11.9. Приоритет играет роль максимального значения z, причем неопределенностей, связанных с глубиной, в этом случае может не быть, поскольку считается, что каждому приоритету соответствует своя плоскость с постоянной координатой z. На рис. 15.6 показаны некоторые типы неопределенностей, необходимость в разрешении которых может возникнуть на шаге 2. Как же устраняются эти неопределенности? Обозначим многоугольник, находящийся в конце упорядоченного списка многоугольников, через Р. До отображения в буфер регенерации этот многоуголь


ник необходимо сравнить с каждой гранью Q, г-оболочка которой перекрывает z-оболочку многоугольника Р. Проверка складывается не более чем из пяти шагов (тестов), которые выполняются в порядке возрастания сложности. Как только на любом из шагов выдается утвердительный ответ, Р сразу преобразуется в растровую форму. Этими пятью тестами являются следующие:
1. х-оболочки многоугольников не перекрываются, поэтому сами многоугольники тоже не перекрываются;
2. у-оболочки многоугольников не перекрываются, поэтому сами многоугольники тоже не перекрываются. (Отметим, что в тестах 1 и 2, взятых в совокупности, оболочки рассматриваются в том виде, как были впервые введены в предыдущем разделе.)
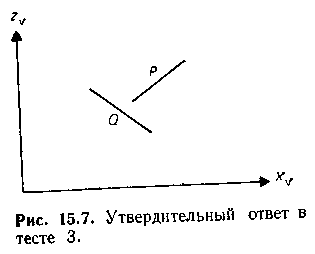
3. Р целиком лежит с той стороны от плоскости Q, которая дальше от точки зрения (этот тест дает отрицательный ответ в случае а на рис. 15.6 и утвердительный ответ в ситуации, показанной на рис. 15.7).
4. Q целиком находится с той стороны от плоскости Р, которая ближе к точке зрения (этот тест дает отрицательный ответ в случае а на рис. 15.6 и утвердительный ответ в ситуации, показанной на рис. 15.8).
5. Проекции многоугольников на плоскость ху (экран) не перекрываются (это определяется путем сравнения ребер одного многоугольника с ребрами другого). В упражнении 15.7 предложен способ реализации тестов 3 и 4.
Если во всех пяти тестах получен отрицательный ответ, мы предполагаем, что Р действительно закрывает Q, поэтому поменяем Р и Q местами в списке, пометив при этом, что многоугольник Q был перемещен на новое место в конце списка. В случае а на рис. 15.6 так оно и есть: если мы сравним Q с Р, то обнаружим с помощью теста 3 (где Р и Q поменялись местами), что многоугольник Q должен преобразовываться в растровую форму первым. В случаях же б и в на рис. 15.6 (поскольку не существует плоскости, разделяющей многоугольники) многоугольник Q рано или поздно придется снова перемещать в списке, и алгоритм зациклится.
Чтобы избежать зацикливания, введем ограничение, в соответствии с которым многоугольник, перенесенный в конец списка (и, следовательно, помеченный), не может подвергаться повторному перемещению. Вместо этого многоугольник Р или Q рассекается на ! две части плоскостью другого многоугольника (разд. 11.6). Первоначальный многоугольник отбрасывается, а две его части включаются в соответствующие места упорядоченного списка, и алгоритм ; продолжает работать, как прежде.
С помощью такого алгоритма многоугольники, находящиеся с задней стороны объекта, изображаются первыми, но затем они могут быть закрыты. Это может помочь наблюдателю понять пространственную структуру объекта, однако отсюда следует, что некоторые многоугольники будут без необходимости преобразовываться в растровую форму. Алгоритм плохо приспособлен для использования на растровых фильмирующих устройствах, поскольку фильм, проэкспонированный под действием некоторого многоугольника, нельзя «разэкспонировать», если позднее на этот многоугольник наложится другой.
С помощью алгоритма сортировки по глубине можно стирать также и невидимые ребра. Вначале в буфер регенерации заносятся некоторые значения V0. При разложении многоугольника в растр его ребрам присваивается некоторое другое значение Vi, а все внутренние пэлы устанавливаются в V0. Если многоугольник перекрывает другой многоугольник, который ранее уже был преобразован в растровую форму, при установке внутренности нового многоугольника в уо будут стерты ребра предыдущего многоугольника. Подобный подход можно использовать и в других алгоритмах, рассмотренных в этой главе.
Упомянутые выше алгоритмы изображения однозначных функций двух переменных действуют так же, как и алгоритм сортировки по глубине, лишь обработка в этих случаях производится, начиная с переднего плана (минимальные значения г) по направлению к заднему. Сортировка, как таковая, отсутствует, поскольку функция однозначная. При изображении каждой новой грани поверхности, представляющей функцию, рисуется только та часть этой грани, которая попадает за пределы внешней границы фигуры, образован-ной ранее рассмотренными гранями. Внешняя граница затем соответствующим образом расширяется. В новом алгоритме Сечреста и Гринберга обработка производится снизу вверх, а не спереди назад 1416].